Potrebbero piacerti anche
- Unidad 5 Teoria de GrafosDocumento14 pagineUnidad 5 Teoria de GrafosAlejandra OspinaNessuna valutazione finora
- Motor de ReluctanciaDocumento31 pagineMotor de ReluctanciaWil Liam67% (9)
- Indicador de Polaridad Con AmplificadorDocumento2 pagineIndicador de Polaridad Con AmplificadorAlejandra OspinaNessuna valutazione finora
- Introduccion de MicroprocesadoresDocumento3 pagineIntroduccion de MicroprocesadoresAlejandra OspinaNessuna valutazione finora
- Trabajo Método de Aceptación y RechazoDocumento18 pagineTrabajo Método de Aceptación y RechazoAlejandra OspinaNessuna valutazione finora
- Diapositivas GESTIÓN DE LA INTEGRACIÓN DEL PROYECTODocumento28 pagineDiapositivas GESTIÓN DE LA INTEGRACIÓN DEL PROYECTOAlejandra OspinaNessuna valutazione finora
- Exposicion Final Control-estadistico-De-procesos-graficos de ControlDocumento28 pagineExposicion Final Control-estadistico-De-procesos-graficos de ControlAlejandra OspinaNessuna valutazione finora
- Teorías de ContenidoDocumento2 pagineTeorías de ContenidoAlejandra Ospina100% (1)
- Posición Anatómica y Planos AnatómicosDocumento33 paginePosición Anatómica y Planos AnatómicosAlejandra OspinaNessuna valutazione finora
- Caso Plan AgregadoDocumento5 pagineCaso Plan AgregadoAlejandra OspinaNessuna valutazione finora
- 14 Aplicaciones Industriales de La Absorción de GasesDocumento6 pagine14 Aplicaciones Industriales de La Absorción de GasesValeria Catalina Galárraga Campoverde100% (2)
- Informe Técnico (Rueda Dentada Seridme)Documento7 pagineInforme Técnico (Rueda Dentada Seridme)Aura Milena Casseres RodriguezNessuna valutazione finora
- Control de Ubicacion de PernosDocumento1 paginaControl de Ubicacion de Pernosroger palacin mendozaNessuna valutazione finora
- Cuidado Del Refrigerador FRigilux PDFDocumento23 pagineCuidado Del Refrigerador FRigilux PDFAlex Fuenmayor100% (1)
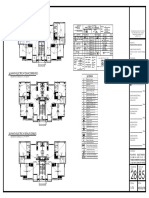
- Diseno Electrico Por ApartamentoDocumento1 paginaDiseno Electrico Por Apartamentooscar moreno loraNessuna valutazione finora
- Laboratorio de Ingeniería de MaterialesDocumento5 pagineLaboratorio de Ingeniería de Materialessaul lopezNessuna valutazione finora
- Manual Horno Eléctrico PDFDocumento8 pagineManual Horno Eléctrico PDFFer CurtinoNessuna valutazione finora
- Práctica 1 ElectrizaciónDocumento4 paginePráctica 1 ElectrizaciónAlex RecerNessuna valutazione finora
- Saber Electronica 026Documento64 pagineSaber Electronica 026victorzuche100% (1)
- Que Es PDTDocumento2 pagineQue Es PDTReisa QuispeNessuna valutazione finora
- El Dinamómetro de Corrientes ParásitasDocumento23 pagineEl Dinamómetro de Corrientes ParásitasLuis AcostaNessuna valutazione finora
- Cuestionario FinalDocumento6 pagineCuestionario FinalRodrigo Calderon LopezNessuna valutazione finora
- Taller#05 (CINEMATICA DEL MOVIMIENTO DE ROTACION)Documento38 pagineTaller#05 (CINEMATICA DEL MOVIMIENTO DE ROTACION)Nicole BelénNessuna valutazione finora
- 1° Miércoles 01 DE SETIEMBRE - PDFFDocumento2 pagine1° Miércoles 01 DE SETIEMBRE - PDFFVioletaTarrilloNonalayaNessuna valutazione finora
- Parcial Electricidad CampbellDocumento10 pagineParcial Electricidad CampbellCarlos CampbellNessuna valutazione finora
- DDFDocumento4 pagineDDFMike KingNessuna valutazione finora
- Estudio Hidrologico San JuanCHINCHA 4Documento282 pagineEstudio Hidrologico San JuanCHINCHA 4Arce MarcovichNessuna valutazione finora
- Diseño de Pavimento - Aashto-93Documento43 pagineDiseño de Pavimento - Aashto-93nickva02Nessuna valutazione finora
- Silabo Curso Refrigeración y Aire Acondicionado 2018 IDocumento4 pagineSilabo Curso Refrigeración y Aire Acondicionado 2018 IJean QuispeNessuna valutazione finora
- Principios Básicos de Token RingDocumento5 paginePrincipios Básicos de Token RingGirbaud HoperNessuna valutazione finora
- 2021 590-125 Sistemas Electrotécnicos y Automáticos-1Documento10 pagine2021 590-125 Sistemas Electrotécnicos y Automáticos-1Alfonso Martos TorresNessuna valutazione finora
- Ensayo de Corte DirectoDocumento26 pagineEnsayo de Corte DirectoDavid Edgar Ramos HuallpaNessuna valutazione finora
- INFORME 11 de Labo de Fisica 3Documento23 pagineINFORME 11 de Labo de Fisica 3luis100% (2)
- Poster - Karina MayorgaDocumento1 paginaPoster - Karina MayorgaKarina MayorgaNessuna valutazione finora
- PMA Furatena DefinitivoDocumento438 paginePMA Furatena DefinitivoCarito TorresNessuna valutazione finora
- KRIGINGDocumento10 pagineKRIGINGJean ValjeanNessuna valutazione finora
- Grupo 3 Practica 3Documento17 pagineGrupo 3 Practica 3Angela Hurtado SalazarNessuna valutazione finora
- Manual Instrucciones Nuevo ProgramadorDocumento8 pagineManual Instrucciones Nuevo ProgramadormanuelNessuna valutazione finora
- Cambio de Rodamiento y Polea Rapida 36" Corona Rig 125Documento6 pagineCambio de Rodamiento y Polea Rapida 36" Corona Rig 125Anonymous ciu3QEjuSNessuna valutazione finora
- Informe Perforación y Sondeo de SuelosDocumento4 pagineInforme Perforación y Sondeo de SuelosCarlos Andrés GuauqueNessuna valutazione finora