Potrebbero piacerti anche
- Ventajas de Lazo Cerrado y AbiertoDocumento2 pagineVentajas de Lazo Cerrado y Abiertohassan9705100% (1)
- Taller Final Redes Convertido J CDocumento16 pagineTaller Final Redes Convertido J CJAVIER ESTEBAN LOPEZ CEBALLOSNessuna valutazione finora
- Control Robusto (Grupo 4 Trabajo)Documento18 pagineControl Robusto (Grupo 4 Trabajo)Raul CondoriNessuna valutazione finora
- Comportamiento de Los Sistemas de Control Con RealimentacionDocumento46 pagineComportamiento de Los Sistemas de Control Con RealimentacionFrank CandoNessuna valutazione finora
- Simulación ElectroneumáticaDocumento5 pagineSimulación ElectroneumáticaJonathan VilcasanaNessuna valutazione finora
- Sistemas Lineales Variables en El Tiempo 1Documento5 pagineSistemas Lineales Variables en El Tiempo 1Isaac Valle LunaNessuna valutazione finora
- Introduccion A Los Compensadores en SistDocumento4 pagineIntroduccion A Los Compensadores en SistlouisNessuna valutazione finora
- 2.5 Fuentes de PLCDocumento10 pagine2.5 Fuentes de PLCLeidy Lopez LopezNessuna valutazione finora
- Cuadro Sinoptico MicrocontroladorDocumento1 paginaCuadro Sinoptico MicrocontroladorCarlos BarbaNessuna valutazione finora
- Ejercicios de TransformadoresDocumento2 pagineEjercicios de TransformadoresIrli LarreguiNessuna valutazione finora
- Introduccion A MATLAB para Sistemas de ControlDocumento12 pagineIntroduccion A MATLAB para Sistemas de ControlEduardo BarahonaNessuna valutazione finora
- 1.5 Opciones Tecnologicas PDFDocumento8 pagine1.5 Opciones Tecnologicas PDFIrene SCNessuna valutazione finora
- Linealizacion AproximadaDocumento3 pagineLinealizacion AproximadanicolasprofecolecrisNessuna valutazione finora
- UNIDAD 5 Variador de VelocidadDocumento9 pagineUNIDAD 5 Variador de VelocidadJuan JimenesNessuna valutazione finora
- PLC ComercialesDocumento13 paginePLC ComercialesPao PazNessuna valutazione finora
- Maquinas y Equipos Termicos 1-1Documento23 pagineMaquinas y Equipos Termicos 1-1GERADONessuna valutazione finora
- Esta Bili DadDocumento89 pagineEsta Bili DadMartinNessuna valutazione finora
- Generación TrifásicaDocumento8 pagineGeneración TrifásicaRodrigo Yupanqui BriceñoNessuna valutazione finora
- 2.5. - Espacio de Estados. Relación Entre Función de Transferencia y Espacios de Estado.Documento20 pagine2.5. - Espacio de Estados. Relación Entre Función de Transferencia y Espacios de Estado.Vitola CampuzanoNessuna valutazione finora
- Técnicas de La Respuesta en Frecuencia de BodeDocumento13 pagineTécnicas de La Respuesta en Frecuencia de BodeDavid GarciaNessuna valutazione finora
- 3.1.4 Etapa de ControlDocumento7 pagine3.1.4 Etapa de ControlRicardo Sanchez HernandezNessuna valutazione finora
- 5ta Asignación Teoria de ControlDocumento14 pagine5ta Asignación Teoria de ControlstefannyNessuna valutazione finora
- Apuntes de Lineas TrifascicasDocumento6 pagineApuntes de Lineas TrifascicasFranchesco JoseNessuna valutazione finora
- Acoplamiento en Paralelo de Generadores Con Excitación CompoundDocumento7 pagineAcoplamiento en Paralelo de Generadores Con Excitación Compoundtumiamor5Nessuna valutazione finora
- Acciones de ControlDocumento55 pagineAcciones de ControlPaolo Andrés Pancho Ramírez0% (1)
- Analisis de Sistemas en El Espacio de Estados.Documento7 pagineAnalisis de Sistemas en El Espacio de Estados.Paul Guillen100% (2)
- Trabajo de Pirometros CompletoDocumento27 pagineTrabajo de Pirometros CompletoKarinaCamargoNessuna valutazione finora
- Reporte de Practica No. 4 - Arranque A Tensión PlenaDocumento5 pagineReporte de Practica No. 4 - Arranque A Tensión PlenaErnesto Sotelo GarciaNessuna valutazione finora
- Reporte Control de Posicion de Motor DCDocumento14 pagineReporte Control de Posicion de Motor DCGuillermo CarrascoNessuna valutazione finora
- MAPA CONCEPTUAlDocumento1 paginaMAPA CONCEPTUAlLeonardoNessuna valutazione finora
- Aplicaciones de Conversor de Frecuencia A Voltaje Final ConclusionesDocumento3 pagineAplicaciones de Conversor de Frecuencia A Voltaje Final ConclusionesMarco Manuel Marca Castillo100% (1)
- Unidad 2 Compensación Utilizando Métodos de Respuesta en FrecuenciaDocumento36 pagineUnidad 2 Compensación Utilizando Métodos de Respuesta en FrecuenciaLuis UreñaNessuna valutazione finora
- Principal MotoresDocumento1 paginaPrincipal MotoresPatricio SinchiNessuna valutazione finora
- Pu 01Documento45 paginePu 01Joseph MorenoNessuna valutazione finora
- Control Pid para La Velocidad de Un Motor DCDocumento4 pagineControl Pid para La Velocidad de Un Motor DCBrayan HiddNessuna valutazione finora
- Solucionario1er Parcial Sep IDocumento6 pagineSolucionario1er Parcial Sep IHellsin Llm100% (1)
- DNP3Documento2 pagineDNP3johanna inchontaNessuna valutazione finora
- TRANSMISORESDocumento22 pagineTRANSMISORESNeil Jimenez Perez0% (2)
- PLC Introducción de RedesDocumento5 paginePLC Introducción de RedesAdrian100% (1)
- Modelo Matematico de Un Sistema ElectricoDocumento3 pagineModelo Matematico de Un Sistema Electricorutila55100% (1)
- Ex U4 Sim SistDocumento2 pagineEx U4 Sim SistAlexis SalgadoNessuna valutazione finora
- Metodo de Volumen FinitoDocumento7 pagineMetodo de Volumen FinitoLuis Alberto Lopez EstevaNessuna valutazione finora
- Clasificacion Nema de Los Motores Asincronos TrifasicosDocumento3 pagineClasificacion Nema de Los Motores Asincronos Trifasicosjose_balcazar890% (1)
- Laboratorio #3. Respuesta Transitoria y Estacionaria.Documento6 pagineLaboratorio #3. Respuesta Transitoria y Estacionaria.Renzo GutiérrezNessuna valutazione finora
- Fallas y Proteccion de Los TransformadoresDocumento23 pagineFallas y Proteccion de Los TransformadoresEvanns P. AzarteNessuna valutazione finora
- Informe 3 (Características y Comportamiento de Los Sistemas de Control Con Realimentación)Documento11 pagineInforme 3 (Características y Comportamiento de Los Sistemas de Control Con Realimentación)Ronaldo LCNessuna valutazione finora
- Ejercicios Inversores MonofasicosDocumento3 pagineEjercicios Inversores MonofasicosDavidEnriqueCuelloNessuna valutazione finora
- Avr PDFDocumento2 pagineAvr PDFAlexander ToapantaNessuna valutazione finora
- Control Por Realimentacion de EstadosDocumento44 pagineControl Por Realimentacion de EstadosJose FonsecaNessuna valutazione finora
- Requerimientos para Programas CAD, CAM, CAE y RenderizadoDocumento12 pagineRequerimientos para Programas CAD, CAM, CAE y RenderizadoAngélica Rocío100% (1)
- Función RampaDocumento2 pagineFunción RampaJulian Andres100% (1)
- Efecto CapacitivoDocumento1 paginaEfecto CapacitivoJesús NavaNessuna valutazione finora
- Diagrama de ParetoDocumento6 pagineDiagrama de Paretoecarrasco270Nessuna valutazione finora
- Tarea 8 Jorge Lobo 616111410 ControlDocumento8 pagineTarea 8 Jorge Lobo 616111410 ControlJose Manuel RodriguezNessuna valutazione finora
- Clase 03 Componentes Ejemplos S Control y Realimentacion V20Documento20 pagineClase 03 Componentes Ejemplos S Control y Realimentacion V20darkNessuna valutazione finora
- Grados de LibertadDocumento3 pagineGrados de LibertaddanixaNessuna valutazione finora
- UF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasDa EverandUF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasValutazione: 2.5 su 5 stelle2.5/5 (3)
- Control automático aplicado: Prácticas de laboratorio 2da. EdiciónDa EverandControl automático aplicado: Prácticas de laboratorio 2da. EdiciónValutazione: 3.5 su 5 stelle3.5/5 (5)
- BridasDocumento6 pagineBridasRonald ChavezNessuna valutazione finora
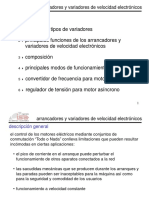
- 07 Arrancadores y Variadores de Velocidad ElectronicosDocumento18 pagine07 Arrancadores y Variadores de Velocidad ElectronicosCristian Castillo AquevequeNessuna valutazione finora
- Bridas para TuberíaDocumento7 pagineBridas para TuberíaSergio Ricaurte VargasNessuna valutazione finora
- Arrancadores y Variadores de Velocidad ALTIVARDocumento9 pagineArrancadores y Variadores de Velocidad ALTIVARRonald ChavezNessuna valutazione finora
- RegulaciónVelocidad 1 PDFDocumento36 pagineRegulaciónVelocidad 1 PDFMike Martinez LozanoNessuna valutazione finora
- Arranque Directo e Inversion de Giro de Un Motor TrifasicoDocumento1 paginaArranque Directo e Inversion de Giro de Un Motor TrifasicoRonald ChavezNessuna valutazione finora
- El Controlador PIDDocumento18 pagineEl Controlador PIDivanrs84Nessuna valutazione finora
- MS2 2006Documento10 pagineMS2 2006guilherme_floresNessuna valutazione finora
- El Controlador PIDDocumento18 pagineEl Controlador PIDivanrs84Nessuna valutazione finora
- MS2 2006Documento10 pagineMS2 2006guilherme_floresNessuna valutazione finora
- Revista El Ingeniero81 WebDocumento52 pagineRevista El Ingeniero81 WebDayvi Lopez JaramilloNessuna valutazione finora
- Sistemas de Energia ElectricaDocumento53 pagineSistemas de Energia ElectricaRonald ChavezNessuna valutazione finora
- Ejercicios de Por UnidadDocumento59 pagineEjercicios de Por UnidadOlga Lucia Borray75% (4)
- Capitulo+6 UnlockedDocumento27 pagineCapitulo+6 UnlockedFabry IsmhaelNessuna valutazione finora
- Ejemplos y EjerciciosDocumento8 pagineEjemplos y EjerciciosBrandon MendezNessuna valutazione finora
- Expediente Administrativo Completo 1Documento76 pagineExpediente Administrativo Completo 1Stephany DiazNessuna valutazione finora
- Ultracoat Recubrimiento para TornilloDocumento2 pagineUltracoat Recubrimiento para TornilloAnonymous HrXPSgQ32TNessuna valutazione finora
- Boletín - Oficial - 2010 09 21 SociedadesDocumento44 pagineBoletín - Oficial - 2010 09 21 SociedadesalejandrorfbNessuna valutazione finora
- Estudio de Mercado y Mecanismos de Comercializacion de Cafes EspecialesDocumento19 pagineEstudio de Mercado y Mecanismos de Comercializacion de Cafes EspecialesgraciamariacafeNessuna valutazione finora
- Actividad 7, Mejores Buscadores y NavegadoresDocumento7 pagineActividad 7, Mejores Buscadores y NavegadoresCora100% (1)
- S08.s1 - MaterialDocumento40 pagineS08.s1 - MaterialDariel TyNessuna valutazione finora
- Presentacion Fundacion Biodess ViverosDocumento9 paginePresentacion Fundacion Biodess ViverosMaria AlejaNessuna valutazione finora
- La Perfecta Abogada PDFDocumento55 pagineLa Perfecta Abogada PDFJose Argenis Flores MonjesNessuna valutazione finora
- Manual de Distribución de Agua (Sistema de Riego Tomoyo)Documento22 pagineManual de Distribución de Agua (Sistema de Riego Tomoyo)Marcelo Alvarez Ascarrunz100% (1)
- Documentos Clínicos y No ClínicosDocumento3 pagineDocumentos Clínicos y No ClínicosceliaNessuna valutazione finora
- Ley 17322 - 19 Ago 1970Documento25 pagineLey 17322 - 19 Ago 1970Señor LapizNessuna valutazione finora
- Actividad 13 ADocumento14 pagineActividad 13 AMaii MendiiölaNessuna valutazione finora
- Formato de Validación de Expertos - 01-07-2023Documento1 paginaFormato de Validación de Expertos - 01-07-2023Dayli ToroNessuna valutazione finora
- BasuraDocumento4 pagineBasuraflor sobre el agua XochiatipanNessuna valutazione finora
- This Is MidesDocumento56 pagineThis Is MidesMario Garrizo100% (1)
- ISO 10816-2-2001.-Turbina de Vapor y Generadores - En.esDocumento17 pagineISO 10816-2-2001.-Turbina de Vapor y Generadores - En.esYadhirithaCahuichOlveraNessuna valutazione finora
- A07Caracteristicas de Camaras - ACGDocumento1 paginaA07Caracteristicas de Camaras - ACGAlberth Castro GonzálezNessuna valutazione finora
- De La Compraventa y Promesa Tomo IDocumento881 pagineDe La Compraventa y Promesa Tomo ICarlos Añasco100% (1)
- Codigos-Codificacion de Rodamentos PDFDocumento60 pagineCodigos-Codificacion de Rodamentos PDFJUAN DIEGO CORTES HERNANDEZNessuna valutazione finora
- Modelos de DespliegueDocumento11 pagineModelos de Desplieguelibertad100% (1)
- Definición de EmpresaDocumento10 pagineDefinición de Empresaedgar murilloNessuna valutazione finora
- Tarea Semana 9.1 GabrielDocumento5 pagineTarea Semana 9.1 GabrielJose67% (6)
- Modos de Una CámaraDocumento5 pagineModos de Una CámaraJhiret BetancourtNessuna valutazione finora
- Claves para Pensar La MarginaciónDocumento15 pagineClaves para Pensar La MarginaciónLiz SantacruzNessuna valutazione finora
- La Secuencia Logica de La EvaluaciónDocumento1 paginaLa Secuencia Logica de La EvaluaciónGladis ContrerasNessuna valutazione finora
- Manual de Robotica para Mis Alumnos Del TallerDocumento66 pagineManual de Robotica para Mis Alumnos Del TallerAndrea Rublev100% (1)
- Agente Munciipal El Reposo PosesionDocumento5 pagineAgente Munciipal El Reposo PosesionATILIO ESPINOZANessuna valutazione finora
- Epm InstallDocumento328 pagineEpm InstallwnowakNessuna valutazione finora
- Despachado Costo Real S/. 4,504.20 F. DespachoDocumento6 pagineDespachado Costo Real S/. 4,504.20 F. DespachoJuanNessuna valutazione finora