Potrebbero piacerti anche
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Sewing Machine Service ManualDocumento40 pagineSewing Machine Service ManualRamon Johnson100% (2)
- MEWP Pre-Use Inspection Checklist NewDocumento1 paginaMEWP Pre-Use Inspection Checklist NewPrimelift Safety Resources LimitedNessuna valutazione finora
- Bromma Telescopic Spreader EH5U PDFDocumento418 pagineBromma Telescopic Spreader EH5U PDFsubhan.ubaedillah100% (3)
- KX 170A - Maintenance Manual HoneywellDocumento587 pagineKX 170A - Maintenance Manual HoneywellMiroslav Němeček50% (4)
- Stingblade: Id: 66842A0101 Er: 26946 FeaturesDocumento1 paginaStingblade: Id: 66842A0101 Er: 26946 FeaturesKhairatul Nada Burhanuddin100% (1)
- Basic Parts of A Computer SystemDocumento34 pagineBasic Parts of A Computer SystemAMNessuna valutazione finora
- Lista de Partes de Turbina SolarDocumento43 pagineLista de Partes de Turbina SolarbillitusNessuna valutazione finora
- RELAY COORDINATION USING ETAP Ijariie12420Documento9 pagineRELAY COORDINATION USING ETAP Ijariie12420Rakesh ShinganeNessuna valutazione finora
- Preventive Maintenance 3300AP K609758Documento99 paginePreventive Maintenance 3300AP K609758Francisco Javier Burgos100% (2)
- TM1 RM1Documento16 pagineTM1 RM1Nikulas HawlaNessuna valutazione finora
- Jamec Air FittingsDocumento18 pagineJamec Air Fittingsgoeez1Nessuna valutazione finora
- Air Hydraulic Jack User'S Manual Model 820B: 20ton CapacityDocumento6 pagineAir Hydraulic Jack User'S Manual Model 820B: 20ton CapacityAlain DefoeNessuna valutazione finora
- Log-CL &! GGG-WVWZZZ3CZCE070209-176660Documento7 pagineLog-CL &! GGG-WVWZZZ3CZCE070209-176660Sandu Denis-SorinNessuna valutazione finora
- CoBra Hardware Manual Rev.1.0Documento63 pagineCoBra Hardware Manual Rev.1.0Cristian CotetNessuna valutazione finora
- Pilot CartridgeDocumento2 paginePilot CartridgeJosé Alberto RodríguezNessuna valutazione finora
- Siep C710617 05F Ga700 TM en PDFDocumento1.052 pagineSiep C710617 05F Ga700 TM en PDFMr.K chNessuna valutazione finora
- LV DriveDocumento16 pagineLV Driveharshad_soni7912Nessuna valutazione finora
- 3.4.1.7 Lab - Research A Hardware UpgradeDocumento2 pagine3.4.1.7 Lab - Research A Hardware UpgradeLinnaNessuna valutazione finora
- 50N024 VishaySiliconixDocumento4 pagine50N024 VishaySiliconixsttecnicoNessuna valutazione finora
- Guided By: Ms. Jyoti Soni Submitted By: Riyanka Sharma Iem, Me (Final Semester)Documento27 pagineGuided By: Ms. Jyoti Soni Submitted By: Riyanka Sharma Iem, Me (Final Semester)Rianca SharmaNessuna valutazione finora
- Double-Stage Diesel Burner ManualDocumento41 pagineDouble-Stage Diesel Burner ManualJavierNessuna valutazione finora
- InflightRefueling HIFR FlyerDocumento2 pagineInflightRefueling HIFR FlyerMone MostafaNessuna valutazione finora
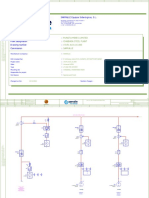
- 19191.6101.01.000 LF MCC Single Line DiagramDocumento5 pagine19191.6101.01.000 LF MCC Single Line DiagramSOUMENNessuna valutazione finora
- Siemens Oil and Gas Duty Motors-The Ultimate For Assured Performance and Long Life enDocumento2 pagineSiemens Oil and Gas Duty Motors-The Ultimate For Assured Performance and Long Life enssNessuna valutazione finora
- Circulating Manifold of Drilling Fluid User ManualDocumento16 pagineCirculating Manifold of Drilling Fluid User ManualJohn SimancaNessuna valutazione finora
- 10.1 Climate Control System OverviewDocumento9 pagine10.1 Climate Control System OverviewIgorIlnickijNessuna valutazione finora
- Service Manual: Mobile TerminalDocumento132 pagineService Manual: Mobile Terminalosmar rafael monsalve valenciaNessuna valutazione finora
- Simulation of Closed Loop Control of Buck Converter Fed DC Motor DriveDocumento4 pagineSimulation of Closed Loop Control of Buck Converter Fed DC Motor DriveIJSTENessuna valutazione finora
- Experiment No. 7 SensorsDocumento8 pagineExperiment No. 7 SensorsJonelNessuna valutazione finora
- IPS120-10 Superconducting Magnet Power Supplies ManualDocumento86 pagineIPS120-10 Superconducting Magnet Power Supplies ManualoybpviskNessuna valutazione finora