Potrebbero piacerti anche
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- IN804 UV-VIS Nomenclature and UnitsDocumento5 pagineIN804 UV-VIS Nomenclature and UnitsAnurak OnnnoomNessuna valutazione finora
- Cost Estimation and Specification of A Sewage Treatment PlantDocumento16 pagineCost Estimation and Specification of A Sewage Treatment Plantmsantosu000Nessuna valutazione finora
- Autodesk 3ds Max SkillsDocumento18 pagineAutodesk 3ds Max SkillsJuan UrdanetaNessuna valutazione finora
- 120-21 TM RF HandbookDocumento164 pagine120-21 TM RF HandbookbaymanNessuna valutazione finora
- Internship Report PDFDocumento11 pagineInternship Report PDFASWIN KUMARNessuna valutazione finora
- CES Wrong Answer SummaryDocumento2 pagineCES Wrong Answer SummaryВладислав КомаровNessuna valutazione finora
- Bistable Relays RXMVB 2, RXMVB 4: FeaturesDocumento4 pagineBistable Relays RXMVB 2, RXMVB 4: FeaturesGabriel Maxo PapagalloNessuna valutazione finora
- Fragility Curves For Mixed Concrete-Steel Frames Subjected To SeismicDocumento5 pagineFragility Curves For Mixed Concrete-Steel Frames Subjected To SeismicJulián PovedaNessuna valutazione finora
- Exercicios de PhonicsDocumento51 pagineExercicios de Phonicsms. TeixeiraNessuna valutazione finora
- Usama Lab 6Documento8 pagineUsama Lab 6M mubeen riazNessuna valutazione finora
- Microsoft PowerPoint - Sesi 2-Communication Skills - PPT (Comp PDFDocumento21 pagineMicrosoft PowerPoint - Sesi 2-Communication Skills - PPT (Comp PDFSarah Eddiah0% (1)
- Pilot Implementation of The Limited Face-to-Face Class Program at Librada Avelino Elementary SchoolDocumento10 paginePilot Implementation of The Limited Face-to-Face Class Program at Librada Avelino Elementary SchoolCher GeriNessuna valutazione finora
- Module - 5Documento92 pagineModule - 5Anand ANessuna valutazione finora
- Directional: 12 1/4in Sdi519 PDCDocumento1 paginaDirectional: 12 1/4in Sdi519 PDCKhairatul Nada BurhanuddinNessuna valutazione finora
- Modul MarketingDocumento5 pagineModul MarketingDeni IrvandaNessuna valutazione finora
- Purposive Communication NotesDocumento33 paginePurposive Communication NotesAlexis DapitoNessuna valutazione finora
- Gerrard 1966Documento13 pagineGerrard 1966AnandhuMANessuna valutazione finora
- Barangay Labangon Shelter Plan: Group 6 Blackjacks Ar 3134 HousingDocumento21 pagineBarangay Labangon Shelter Plan: Group 6 Blackjacks Ar 3134 HousingGicelle SenoNessuna valutazione finora
- PSCADDocumento10 paginePSCADkaran976Nessuna valutazione finora
- Unit 9: Cities of The World I. ObjectivesDocumento4 pagineUnit 9: Cities of The World I. ObjectivesTrang Hoang NguyenNessuna valutazione finora
- Arquitectura Objectiva cl2002Documento9 pagineArquitectura Objectiva cl2002api-717600385Nessuna valutazione finora
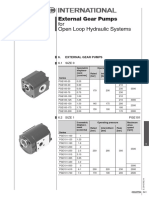
- External Gear Pumps For Open Loop Hydraulic SystemsDocumento2 pagineExternal Gear Pumps For Open Loop Hydraulic SystemsBlashko GjorgjievNessuna valutazione finora
- Winter Student Enrichment PacketDocumento9 pagineWinter Student Enrichment PacketshelleyallynNessuna valutazione finora
- Nature'S Numbers: - BasicbooksDocumento39 pagineNature'S Numbers: - Basicbooksyeol pacisNessuna valutazione finora
- Bc63kb8a Dy152 - 153 Vendor Drawing n001 Air Compressors SperreDocumento60 pagineBc63kb8a Dy152 - 153 Vendor Drawing n001 Air Compressors SperreSimonaMauna33% (3)
- Daikin LXE10E-A - Service Manual (TR 01-09B) PDFDocumento238 pagineDaikin LXE10E-A - Service Manual (TR 01-09B) PDFmail4ksnNessuna valutazione finora
- English 4 Q.2 Module 2Documento6 pagineEnglish 4 Q.2 Module 2RjVValdezNessuna valutazione finora
- PlumbingDocumento1 paginaPlumbingminesdomieNessuna valutazione finora
- 3 Tan 8.3 Tan108 Tan 8 - 1 3tan 8.3: Single Choice CorrectDocumento3 pagine3 Tan 8.3 Tan108 Tan 8 - 1 3tan 8.3: Single Choice CorrectShehbaz ThakurNessuna valutazione finora
- RAMTHA-The Tragedy of Women's EnslavementDocumento6 pagineRAMTHA-The Tragedy of Women's EnslavementPetrea Raul AndreiNessuna valutazione finora