Potrebbero piacerti anche
- Neuroevolution: Fundamentals and Applications for Surpassing Human Intelligence with NeuroevolutionDa EverandNeuroevolution: Fundamentals and Applications for Surpassing Human Intelligence with NeuroevolutionNessuna valutazione finora
- Kitano 2002Documento4 pagineKitano 2002Ashley FloresNessuna valutazione finora
- Systems Biomedicine: Concepts and PerspectivesDa EverandSystems Biomedicine: Concepts and PerspectivesEdison T. LiuNessuna valutazione finora
- In-Silico Models of Stem Cell and Developmental Systems: Review Open AccessDocumento12 pagineIn-Silico Models of Stem Cell and Developmental Systems: Review Open AccessYuvraj SinghNessuna valutazione finora
- Self-organizing Neural Maps: The Retinotectal Map and Mechanisms of Neural Development: From Retina to TectumDa EverandSelf-organizing Neural Maps: The Retinotectal Map and Mechanisms of Neural Development: From Retina to TectumNessuna valutazione finora
- PR 50b7cd3dDocumento21 paginePR 50b7cd3dBinderiya EnkhbatNessuna valutazione finora
- Brainless BodiesDocumento8 pagineBrainless BodiesAnunay Arunav PandeyNessuna valutazione finora
- Systems Biology: A Brief Overview: Science April 2002Documento4 pagineSystems Biology: A Brief Overview: Science April 2002ayeshaNessuna valutazione finora
- 1 s2.0 S1474667016356658 MainDocumento6 pagine1 s2.0 S1474667016356658 MainFernando Nicolas Ureta GodoyNessuna valutazione finora
- Explaining A Complex Living System: Dynamics, Multi-Scaling and EmergenceDocumento8 pagineExplaining A Complex Living System: Dynamics, Multi-Scaling and EmergenceBababa Eke100% (1)
- Systems Biology: A Brief Overview: S B: T G, L, BDocumento4 pagineSystems Biology: A Brief Overview: S B: T G, L, BVijendra KavatalkarNessuna valutazione finora
- Karr A Whole Cell Computational Model 2012Documento25 pagineKarr A Whole Cell Computational Model 2012AndaNessuna valutazione finora
- The Scaling of Goals Via Homeostasis - An Evolutionary Simulation, Experiment and AnalysisDocumento27 pagineThe Scaling of Goals Via Homeostasis - An Evolutionary Simulation, Experiment and AnalysisLuca MaciNessuna valutazione finora
- 1 s2.0 S1367593121000600 MainDocumento7 pagine1 s2.0 S1367593121000600 MainSumaiya Sadia BristyNessuna valutazione finora
- Models of Biological Pattern Formation: Common Mechanism in Plant and Animal DevelopmentDocumento12 pagineModels of Biological Pattern Formation: Common Mechanism in Plant and Animal DevelopmentKevin PinedaNessuna valutazione finora
- Biological Master Games: Using Biologists' Reasoning To Guide Algorithm Development For Integrated Functional GenomicsDocumento8 pagineBiological Master Games: Using Biologists' Reasoning To Guide Algorithm Development For Integrated Functional GenomicspressorgNessuna valutazione finora
- On The Relationships Between Generative Encodings, Regularity, and Learning Abilities When Evolving Plastic Artificial Neural NetworksDocumento29 pagineOn The Relationships Between Generative Encodings, Regularity, and Learning Abilities When Evolving Plastic Artificial Neural Networksmandor-Nessuna valutazione finora
- Systems Biology Informed Deep Learning For Inferring Parameters and Hidden DynamicsDocumento19 pagineSystems Biology Informed Deep Learning For Inferring Parameters and Hidden Dynamicsgodray1234aNessuna valutazione finora
- Bio Technologia 2013943Documento17 pagineBio Technologia 2013943Nam Hoàng VănNessuna valutazione finora
- General Biology 2 Q3-M1 GeneticsDocumento25 pagineGeneral Biology 2 Q3-M1 GeneticsAdrian DisuNessuna valutazione finora
- BioEssays - 2002 - Tyson - The Dynamics of Cell Cycle RegulationDocumento15 pagineBioEssays - 2002 - Tyson - The Dynamics of Cell Cycle RegulationNindya AgustiaNessuna valutazione finora
- High School Bioethics Lesson Plans CrisprDocumento20 pagineHigh School Bioethics Lesson Plans CrisprPapi PepperoniNessuna valutazione finora
- INTERFEROMICSDocumento15 pagineINTERFEROMICSAnshul Joshi100% (1)
- Review Article: Mathematical and Computational Modeling in Complex Biological SystemsDocumento18 pagineReview Article: Mathematical and Computational Modeling in Complex Biological SystemsAulia KarlikaNessuna valutazione finora
- Genetic Dissection of Neural CircuitsDocumento27 pagineGenetic Dissection of Neural CircuitsMukund SrinivasNessuna valutazione finora
- Chap 105Documento8 pagineChap 105Sudhir SinghNessuna valutazione finora
- Xenobots 2Documento14 pagineXenobots 2yaswanthjetti21Nessuna valutazione finora
- Evolution of Adaptive Behaviour in Robots by Means of Darwinian SelectionDocumento8 pagineEvolution of Adaptive Behaviour in Robots by Means of Darwinian SelectionThe Washington CenterNessuna valutazione finora
- Luo Et Al. Genetic Discussion of Neural CircuitsDocumento27 pagineLuo Et Al. Genetic Discussion of Neural CircuitscinaljessNessuna valutazione finora
- NewmanCellDifferentiation JTBDocumento8 pagineNewmanCellDifferentiation JTBVILEOLAGOLDNessuna valutazione finora
- Some New Directions in Control Theory Inspired by Systems BiologyDocumento10 pagineSome New Directions in Control Theory Inspired by Systems BiologyLeandro BarretoNessuna valutazione finora
- Behavioural Robustness: A Link Between Distributed Mechanisms and Coupled Transient DynamicsDocumento13 pagineBehavioural Robustness: A Link Between Distributed Mechanisms and Coupled Transient Dynamicsjosef_151Nessuna valutazione finora
- Advances in Stem Cells and Regenerative Medicine: Single-Cell Dynamics, New Models and Translational PerspectivesDocumento5 pagineAdvances in Stem Cells and Regenerative Medicine: Single-Cell Dynamics, New Models and Translational PerspectivesVeridica El EdgieNessuna valutazione finora
- Competitive Coevolution Through Evolutionary ComplexificationDocumento38 pagineCompetitive Coevolution Through Evolutionary ComplexificationAndrea GibsonNessuna valutazione finora
- Biological Computation PDFDocumento7 pagineBiological Computation PDFmanoj_rkl_07Nessuna valutazione finora
- Instructions For Assembling The Early Mammalian Embryo: Developmental Cell June 2018Documento14 pagineInstructions For Assembling The Early Mammalian Embryo: Developmental Cell June 2018nugrahoneyNessuna valutazione finora
- Baluska and Levin - On Having No Head Cognition Throughout Biological SystemsDocumento19 pagineBaluska and Levin - On Having No Head Cognition Throughout Biological SystemsFaruk AcarNessuna valutazione finora
- Origin and Evolution of Nervous SystemsDocumento22 pagineOrigin and Evolution of Nervous SystemsLucia blasco ChoviNessuna valutazione finora
- Jair 2104 PDFDocumento38 pagineJair 2104 PDFAndrea GibsonNessuna valutazione finora
- Modeling Network DynamicsDocumento6 pagineModeling Network DynamicsirisNessuna valutazione finora
- Systems Biology in The Cell Nucleus: 4083 CommentaryDocumento10 pagineSystems Biology in The Cell Nucleus: 4083 CommentaryNarayla LailaNessuna valutazione finora
- Mente Consciência Dificuldade Explicar Como Células e Sinais Elétricos Podem Gerar Estados Mentais SciamDocumento11 pagineMente Consciência Dificuldade Explicar Como Células e Sinais Elétricos Podem Gerar Estados Mentais SciamGardenia AndradeNessuna valutazione finora
- 百万单细胞数据时代的多组学整合Documento15 pagine百万单细胞数据时代的多组学整合zzh991209Nessuna valutazione finora
- General Biology 2Documento4 pagineGeneral Biology 2Charmaine LustriaNessuna valutazione finora
- Batch and Continuous Culture ofDocumento10 pagineBatch and Continuous Culture ofSarah PavuNessuna valutazione finora
- Gardel JCB 2015Documento3 pagineGardel JCB 2015useretailNessuna valutazione finora
- Genetic and Evolutionary Computation: Who, What, Where, When, and WhyDocumento8 pagineGenetic and Evolutionary Computation: Who, What, Where, When, and WhyBruno MartinsNessuna valutazione finora
- Verified BiologyDocumento22 pagineVerified BiologyBababa EkeNessuna valutazione finora
- Adami C Digital Genetics Unravelling The Genetic BDocumento11 pagineAdami C Digital Genetics Unravelling The Genetic BPedro PazNessuna valutazione finora
- Lesson Plan For Cell Biology: 2016-17 Cellular Encounter: Designing A Model Cell - (Plant Cell)Documento8 pagineLesson Plan For Cell Biology: 2016-17 Cellular Encounter: Designing A Model Cell - (Plant Cell)Camille Sison-AlmirolNessuna valutazione finora
- EmergentDynamics PDFDocumento10 pagineEmergentDynamics PDFBababa EkeNessuna valutazione finora
- Jurnal Makalah UasDocumento27 pagineJurnal Makalah Uasika indayatiNessuna valutazione finora
- Bioinformatics: Applications: ZOO 4903 Fall 2006, MW 10:30-11:45 Sutton Hall, Room 312 Jonathan WrenDocumento75 pagineBioinformatics: Applications: ZOO 4903 Fall 2006, MW 10:30-11:45 Sutton Hall, Room 312 Jonathan WrenlordniklausNessuna valutazione finora
- A System-Level Model For The Microbial Regulatory Genome: ArticleDocumento14 pagineA System-Level Model For The Microbial Regulatory Genome: Articleyogo69Nessuna valutazione finora
- A Computational Model of Organism Development and Carcinogenesis Resulting From Cells' Bioelectric Properties and CommunicationDocumento14 pagineA Computational Model of Organism Development and Carcinogenesis Resulting From Cells' Bioelectric Properties and CommunicationAlan de OliveiraNessuna valutazione finora
- Synthetic Biology: Steven A. Benner and A. Michael SismourDocumento11 pagineSynthetic Biology: Steven A. Benner and A. Michael SismourGanesh NagarajanNessuna valutazione finora
- Alife2010a KhanDocumento8 pagineAlife2010a KhanBrandon Echenique GNessuna valutazione finora
- Hu 2004Documento13 pagineHu 2004Jose Fernando Bastos ZayasNessuna valutazione finora
- Modeling and Simulation of Genetic Regulatory Systems: A Literature ReviewDocumento58 pagineModeling and Simulation of Genetic Regulatory Systems: A Literature ReviewKevian ZepedaNessuna valutazione finora
- Modeling and Simulation of Genetic Regulatory Systems: A Literature ReviewDocumento37 pagineModeling and Simulation of Genetic Regulatory Systems: A Literature ReviewsamuelamdeNessuna valutazione finora
- Dummit and Foote Chapter 1 SolutionsDocumento39 pagineDummit and Foote Chapter 1 SolutionsIon Mikel Onandia MartinezNessuna valutazione finora
- Making Authentic Craftsman Furniture - Instructions and Plans For 62 Projects (Dover Books On Woodworking & Carving) (PDFDrive)Documento10 pagineMaking Authentic Craftsman Furniture - Instructions and Plans For 62 Projects (Dover Books On Woodworking & Carving) (PDFDrive)Ion Mikel Onandia MartinezNessuna valutazione finora
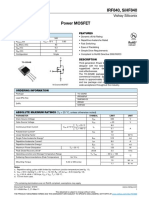
- Irfz44, Sihfz44: Vishay SiliconixDocumento9 pagineIrfz44, Sihfz44: Vishay SiliconixAkhilesh Kumar MishraNessuna valutazione finora
- Dummit and Foote Chapter 0 SolutionsDocumento8 pagineDummit and Foote Chapter 0 SolutionsIon Mikel Onandia MartinezNessuna valutazione finora
- Icl 8069Documento6 pagineIcl 8069Ion Mikel Onandia MartinezNessuna valutazione finora
- Dummit and Foote Chapter 2 SolutionsDocumento31 pagineDummit and Foote Chapter 2 SolutionsIon Mikel Onandia MartinezNessuna valutazione finora
- O-10 (Retouching B&W Film and Prints)Documento8 pagineO-10 (Retouching B&W Film and Prints)Ion Mikel Onandia MartinezNessuna valutazione finora
- 91070Documento9 pagine91070atomdNessuna valutazione finora
- Analog Audio PDFDocumento7 pagineAnalog Audio PDFIon Mikel Onandia MartinezNessuna valutazione finora
- 4 Digit LED Display - Colan Vs DPDocumento1 pagina4 Digit LED Display - Colan Vs DPIon Mikel Onandia MartinezNessuna valutazione finora
- Getting The Most Out of Your FilmDocumento5 pagineGetting The Most Out of Your FilmIon Mikel Onandia MartinezNessuna valutazione finora
- Sprocket CatDocumento32 pagineSprocket CatIon Mikel Onandia Martinez0% (1)
- Genetic Algorithms TutorialDocumento67 pagineGenetic Algorithms TutorialHuda Mohammed TounyNessuna valutazione finora
- Super HetDocumento6 pagineSuper HetAsheque IqbalNessuna valutazione finora
- Take Five by Chet AtkinsDocumento6 pagineTake Five by Chet AtkinsIon Mikel Onandia MartinezNessuna valutazione finora
- Building An AM Radio: ObjectivesDocumento4 pagineBuilding An AM Radio: ObjectivesIon Mikel Onandia MartinezNessuna valutazione finora
- Arnheim Rudolf Arte y Percepcion VisualDocumento2 pagineArnheim Rudolf Arte y Percepcion VisualIon Mikel Onandia MartinezNessuna valutazione finora
- Phase-Locked Loops: A Control Centric Tutorial: Daniel AbramovitchDocumento18 paginePhase-Locked Loops: A Control Centric Tutorial: Daniel AbramovitchIon Mikel Onandia MartinezNessuna valutazione finora
- Kodak Rapid Selinium Toner PDFDocumento8 pagineKodak Rapid Selinium Toner PDFIon Mikel Onandia MartinezNessuna valutazione finora
- KINOR 16CX-2M 16mm Motion Picture Camera Instruction ManualDocumento17 pagineKINOR 16CX-2M 16mm Motion Picture Camera Instruction ManualgrgfischNessuna valutazione finora
- Intro To Spiking Neural NetworksDocumento10 pagineIntro To Spiking Neural NetworksjeffconnorsNessuna valutazione finora
- Feet Per Minute & Frames Per FootDocumento11 pagineFeet Per Minute & Frames Per FootEmilio Pittier GarcíaNessuna valutazione finora
- Data SheetDocumento20 pagineData SheetIon Mikel Onandia MartinezNessuna valutazione finora
- Shell Voicings As ArpeggiosDocumento2 pagineShell Voicings As ArpeggiosIon Mikel Onandia MartinezNessuna valutazione finora
- Kodak Student Handbook PDFDocumento136 pagineKodak Student Handbook PDFIon Mikel Onandia Martinez100% (1)
- 06 TheZoneSystem PDFDocumento6 pagine06 TheZoneSystem PDFIon Mikel Onandia MartinezNessuna valutazione finora
- 06 TheZoneSystem PDFDocumento6 pagine06 TheZoneSystem PDFIon Mikel Onandia MartinezNessuna valutazione finora
- Dolby EvolutionDocumento7 pagineDolby EvolutionIon Mikel Onandia MartinezNessuna valutazione finora
- IBM Thinkpad Z61 Quanta BW2Documento80 pagineIBM Thinkpad Z61 Quanta BW2Abubakar SidikNessuna valutazione finora
- Vehicles 6-Speed PowerShift Transmission DPS6 DescriptionDocumento3 pagineVehicles 6-Speed PowerShift Transmission DPS6 DescriptionCarlos SerapioNessuna valutazione finora
- Trox Quick Selection GuideDocumento47 pagineTrox Quick Selection GuideErwin LouisNessuna valutazione finora
- Decolonization DBQDocumento3 pagineDecolonization DBQapi-493862773Nessuna valutazione finora
- Pyle 4ch Marine BTDocumento4 paginePyle 4ch Marine BTRafael VieiraNessuna valutazione finora
- Water Works RTADocumento15 pagineWater Works RTAalfaza3Nessuna valutazione finora
- COE301 Lab 2 Introduction MIPS AssemblyDocumento7 pagineCOE301 Lab 2 Introduction MIPS AssemblyItz Sami UddinNessuna valutazione finora
- Mineral Resource Classification - It's Time To Shoot The Spotted Dog'!Documento6 pagineMineral Resource Classification - It's Time To Shoot The Spotted Dog'!Hassan Dotsh100% (1)
- Quiz EditedDocumento6 pagineQuiz EditedAbigail LeronNessuna valutazione finora
- ActivityDocumento2 pagineActivityShaira May SalvadorNessuna valutazione finora
- CD4 12-P374493Documento30 pagineCD4 12-P374493suraj_savant1Nessuna valutazione finora
- Super Gene 1201-1300Documento426 pagineSuper Gene 1201-1300Henri AtanganaNessuna valutazione finora
- Green ChemistryDocumento17 pagineGreen ChemistryAaditya RamanNessuna valutazione finora
- Synopsis SsDocumento14 pagineSynopsis SsJYOTI KATIYAR SVUNessuna valutazione finora
- Principles of Volumetric AnalysisDocumento5 paginePrinciples of Volumetric AnalysisMax TennerNessuna valutazione finora
- Annual Report 2022 2Documento48 pagineAnnual Report 2022 2Dejan ReljinNessuna valutazione finora
- Maintaining Godly Spirituality in The Face of ChallengesDocumento3 pagineMaintaining Godly Spirituality in The Face of ChallengesDavid OmoniyiNessuna valutazione finora
- Rizal Noli Me TangereDocumento35 pagineRizal Noli Me TangereKristine Cantilero100% (2)
- Def - Pemf Chronic Low Back PainDocumento17 pagineDef - Pemf Chronic Low Back PainFisaudeNessuna valutazione finora
- Directorate of Indian Medicines & Homoeopathy, Orissa, Bhubaneswar Listof The Homoeopathic Dispensaries BhadrakDocumento1 paginaDirectorate of Indian Medicines & Homoeopathy, Orissa, Bhubaneswar Listof The Homoeopathic Dispensaries Bhadrakbiswajit mathematicsNessuna valutazione finora
- Character Paragraph Analysis RubricDocumento2 pagineCharacter Paragraph Analysis RubricDiana PerrottaNessuna valutazione finora
- Chapter 5: Current and Resistance: 5.1 The Motion of Electric ChargeDocumento11 pagineChapter 5: Current and Resistance: 5.1 The Motion of Electric Chargeayunna ayunniNessuna valutazione finora
- Abhishek Parmar: Personal DetailsDocumento2 pagineAbhishek Parmar: Personal DetailsabhishekparmarNessuna valutazione finora
- Coping Mechanism and Academic Performance Among FiDocumento14 pagineCoping Mechanism and Academic Performance Among FiMary Margaret MorillaNessuna valutazione finora
- TOPIC 2 - Fans, Blowers and Air CompressorDocumento69 pagineTOPIC 2 - Fans, Blowers and Air CompressorCllyan ReyesNessuna valutazione finora
- Interventional Studies 2Documento28 pagineInterventional Studies 2Abdul RazzakNessuna valutazione finora
- M 995Documento43 pagineM 995Hossam AliNessuna valutazione finora
- Mge - Ex11rt - Installation and User Manual PDFDocumento38 pagineMge - Ex11rt - Installation and User Manual PDFRafa TejedaNessuna valutazione finora
- Industrial Automation Using PLCDocumento29 pagineIndustrial Automation Using PLCAditya JagannathanNessuna valutazione finora
- How To Prepare Adjusting Entries - Step-By-Step (2023)Documento10 pagineHow To Prepare Adjusting Entries - Step-By-Step (2023)Yaseen GhulamNessuna valutazione finora
- CATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchDa EverandCATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchValutazione: 4 su 5 stelle4/5 (10)
- Certified Solidworks Professional Advanced Weldments Exam PreparationDa EverandCertified Solidworks Professional Advanced Weldments Exam PreparationValutazione: 5 su 5 stelle5/5 (1)
- Beginning AutoCAD® 2020 Exercise WorkbookDa EverandBeginning AutoCAD® 2020 Exercise WorkbookValutazione: 2.5 su 5 stelle2.5/5 (3)
- FreeCAD | Step by Step: Learn how to easily create 3D objects, assemblies, and technical drawingsDa EverandFreeCAD | Step by Step: Learn how to easily create 3D objects, assemblies, and technical drawingsValutazione: 5 su 5 stelle5/5 (1)
- SketchUp Success for Woodworkers: Four Simple Rules to Create 3D Drawings Quickly and AccuratelyDa EverandSketchUp Success for Woodworkers: Four Simple Rules to Create 3D Drawings Quickly and AccuratelyValutazione: 1.5 su 5 stelle1.5/5 (2)
- AutoCAD 2023 : Beginners And Intermediate user GuideDa EverandAutoCAD 2023 : Beginners And Intermediate user GuideNessuna valutazione finora
- Beginning AutoCAD® 2022 Exercise Workbook: For Windows®Da EverandBeginning AutoCAD® 2022 Exercise Workbook: For Windows®Nessuna valutazione finora
- Contactless Vital Signs MonitoringDa EverandContactless Vital Signs MonitoringWenjin WangNessuna valutazione finora
- Up and Running with AutoCAD 2020: 2D Drafting and DesignDa EverandUp and Running with AutoCAD 2020: 2D Drafting and DesignNessuna valutazione finora
- Design Research Through Practice: From the Lab, Field, and ShowroomDa EverandDesign Research Through Practice: From the Lab, Field, and ShowroomValutazione: 3 su 5 stelle3/5 (7)