Potrebbero piacerti anche
- Ejemplario: Ecuaciones Diferenciales OrdinariasDa EverandEjemplario: Ecuaciones Diferenciales OrdinariasNessuna valutazione finora
- Modelos de TurbulenciaDocumento2 pagineModelos de Turbulenciatete9999Nessuna valutazione finora
- Proyecto VALVULASDocumento29 pagineProyecto VALVULASOmar Yulian LeonNessuna valutazione finora
- Ps2321 Guia Completa Rev 4 2cap 1 6Documento64 paginePs2321 Guia Completa Rev 4 2cap 1 6cleytonmarques1991Nessuna valutazione finora
- Tema 4.balance ElementalDocumento36 pagineTema 4.balance ElementalWilsonNessuna valutazione finora
- Química BásicaDocumento46 pagineQuímica BásicaQcHeNessuna valutazione finora
- Procesos químicos industrialesDocumento116 pagineProcesos químicos industrialesFelipe Arjona MartínezNessuna valutazione finora
- Tipos de MedidoresDocumento8 pagineTipos de Medidoresyhancarlos111Nessuna valutazione finora
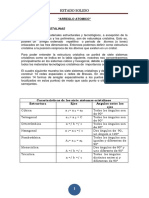
- Estado SolidoDocumento42 pagineEstado SolidodanteNessuna valutazione finora
- Guía Problemas Cinética Química ImportanteDocumento3 pagineGuía Problemas Cinética Química ImportanteJohnny Javier Arenas DíazNessuna valutazione finora
- Produccion de Cloruro de ViniloDocumento16 pagineProduccion de Cloruro de ViniloDiamante Hernandez MeridaNessuna valutazione finora
- Fun Esp-Clase 5Documento5 pagineFun Esp-Clase 5natalia gomezNessuna valutazione finora
- Disoluciones STDocumento6 pagineDisoluciones STPaulo Ignacio Ossandón SánchezNessuna valutazione finora
- Líneas EquipotencialesDocumento5 pagineLíneas EquipotencialesSebastian MerchanNessuna valutazione finora
- Informe 2 Qca FisicaDocumento5 pagineInforme 2 Qca FisicaMatilde Santibáñez MéndezNessuna valutazione finora
- Redes de Bravais PDFDocumento5 pagineRedes de Bravais PDFJavier SotomayorNessuna valutazione finora
- Escorificante y Desoxidante para Fundición de AluminioDocumento2 pagineEscorificante y Desoxidante para Fundición de AluminioagustingrtNessuna valutazione finora
- Problemas Electroanalisis2010 11Documento12 pagineProblemas Electroanalisis2010 11John Quintana HuamaliesNessuna valutazione finora
- Cadenas transmisión energíaDocumento14 pagineCadenas transmisión energíaaristolesNessuna valutazione finora
- Hclases de Balance de Materia y Energiaclase 1-Ing. Química y TextilDocumento26 pagineHclases de Balance de Materia y Energiaclase 1-Ing. Química y TextilJUNIORNessuna valutazione finora
- Informe Generdor Van Der GraffDocumento4 pagineInforme Generdor Van Der GraffJuanCarlosMedinaNessuna valutazione finora
- Procesos de PolimerizaciónDocumento5 pagineProcesos de PolimerizaciónYeners15Nessuna valutazione finora
- (01 y 08-09-2016) Termodinamica de Los Sistemas MulticomponentesDocumento83 pagine(01 y 08-09-2016) Termodinamica de Los Sistemas MulticomponentesHilario Cantaro MejiaNessuna valutazione finora
- Diseño y Construcción de La Torre de Absorción de GasesDocumento22 pagineDiseño y Construcción de La Torre de Absorción de GasesyumniNessuna valutazione finora
- Agitador MagneticoDocumento20 pagineAgitador MagneticoErik Ruiz100% (2)
- GlosarioTermodinámicoDocumento8 pagineGlosarioTermodinámicorodrictmNessuna valutazione finora
- Cinetica Enzimatica para Los AlumnosDocumento47 pagineCinetica Enzimatica para Los AlumnosMazinges Ajesa100% (1)
- Ecuaciones de Estado y Factores CruzadosDocumento21 pagineEcuaciones de Estado y Factores CruzadosJosé Luis LMNessuna valutazione finora
- Ecuacion de Clausius - ClayperonDocumento27 pagineEcuacion de Clausius - Clayperongustavo_castro_17Nessuna valutazione finora
- Modelos UnimolecularesDocumento15 pagineModelos UnimolecularesAbelardo Guzman LavadoNessuna valutazione finora
- Apuntes Química Básica UNIDAD III Y IVDocumento45 pagineApuntes Química Básica UNIDAD III Y IVGerardo Aguirre HernandezNessuna valutazione finora
- Nom Oficial Mexicana 022Documento21 pagineNom Oficial Mexicana 022Dagoberto Rodriguez ValdezNessuna valutazione finora
- Fisicoquimica I Agosto 2020 PDFDocumento74 pagineFisicoquimica I Agosto 2020 PDFDulce GonzálezNessuna valutazione finora
- Método de Tiempo de Vida MediaDocumento1 paginaMétodo de Tiempo de Vida Mediamipenene100% (1)
- Lab No 1 Sintesis y Caracterizacion Del MN Acac 3Documento4 pagineLab No 1 Sintesis y Caracterizacion Del MN Acac 3Valentina Guerrero FlorezNessuna valutazione finora
- Diseño planta producción etilbenceno 80,000 ton/díaDocumento34 pagineDiseño planta producción etilbenceno 80,000 ton/díaIsberto MartínezNessuna valutazione finora
- Leyes de Kirchhoff en circuitos eléctricosDocumento8 pagineLeyes de Kirchhoff en circuitos eléctricosFer LinaresNessuna valutazione finora
- Reactores PDocumento68 pagineReactores PLuis ZavalaNessuna valutazione finora
- Camisa y SerpentinDocumento14 pagineCamisa y SerpentinAna AltamiranoNessuna valutazione finora
- Sesion 3Documento8 pagineSesion 3Felipe Correa MahechaNessuna valutazione finora
- Manual de Prácticas LQI-V 2014Documento96 pagineManual de Prácticas LQI-V 2014Rodrigo Chico Merino100% (1)
- Equipo 1 - Reporte Practica 1Documento8 pagineEquipo 1 - Reporte Practica 1Anayuri TrejoNessuna valutazione finora
- Nano Material EsDocumento16 pagineNano Material EscesitarcalcinaNessuna valutazione finora
- Heurísticas para El Diseño de Procesos Químicos Respecto A La Materia PrimaDocumento2 pagineHeurísticas para El Diseño de Procesos Químicos Respecto A La Materia PrimaCarlosNessuna valutazione finora
- Notas de AIDADocumento184 pagineNotas de AIDAluisfernandoacNessuna valutazione finora
- Practica No.6Documento8 paginePractica No.6Cesar Abdiel Ugalde CortesNessuna valutazione finora
- Practica 2Documento19 paginePractica 2Angell Glez SalgadoNessuna valutazione finora
- Resumen Espectrometría de Absorción AtómicaDocumento6 pagineResumen Espectrometría de Absorción AtómicaRoger Villar DurandNessuna valutazione finora
- Práctica No. 5" Encendido y Apagado de Un Equipo de Cromatografía de Líquidos de Alta Resolución HPLC "Documento15 paginePráctica No. 5" Encendido y Apagado de Un Equipo de Cromatografía de Líquidos de Alta Resolución HPLC "Chantal Abigail Reséndiz GómezNessuna valutazione finora
- MDP 02 FF 05-FLUJO de FLUIDOS-Flujo BifasicosDocumento56 pagineMDP 02 FF 05-FLUJO de FLUIDOS-Flujo BifasicosRichard GutierrezNessuna valutazione finora
- Conclusion de Sistema de Tuberías de Flujo ComprensibleDocumento1 paginaConclusion de Sistema de Tuberías de Flujo ComprensibleSindy AguirreNessuna valutazione finora
- Termodinámica UNSA: Principios y aplicacionesDocumento5 pagineTermodinámica UNSA: Principios y aplicacionesJosué ItusacaNessuna valutazione finora
- Problemas de Termodinámica QuímicaDocumento12 pagineProblemas de Termodinámica QuímicaLeonardo Poublette VegasNessuna valutazione finora
- Viscosidad Marco TeoricoDocumento3 pagineViscosidad Marco TeoricoNicole AracelyNessuna valutazione finora
- Programa - Analitico - Mecanica de Fluidos II G 1Documento2 paginePrograma - Analitico - Mecanica de Fluidos II G 1Julio Andrés Campos VásquezNessuna valutazione finora
- Guia 3 Diagramas de Fase FeFe3CDocumento10 pagineGuia 3 Diagramas de Fase FeFe3CGregory GoncalvezNessuna valutazione finora
- Monografia EjemploDocumento21 pagineMonografia Ejemplocrispinzaidy3Nessuna valutazione finora
- A9 AmlrDocumento8 pagineA9 AmlrArmando MontesNessuna valutazione finora
- Motero Contioso Vanessa María TFG PDFDocumento90 pagineMotero Contioso Vanessa María TFG PDFLiza Montalvo BarreraNessuna valutazione finora
- Cot Lorentz Material Contra IncendioDocumento2 pagineCot Lorentz Material Contra IncendioLuis Antonio Chiapas GarciaNessuna valutazione finora
- Acta de Entrega U-A0444Documento2 pagineActa de Entrega U-A0444Luis Antonio Chiapas GarciaNessuna valutazione finora
- 3SU11036AA301AA0 Datasheet EsDocumento5 pagine3SU11036AA301AA0 Datasheet EsLuis Antonio Chiapas GarciaNessuna valutazione finora
- 3SU11000AB201FA0 Datasheet EsDocumento5 pagine3SU11000AB201FA0 Datasheet EsLuis Antonio Chiapas GarciaNessuna valutazione finora
- Usiicsa - Propuesta Mantto. Uslg y Coquer OkDocumento23 pagineUsiicsa - Propuesta Mantto. Uslg y Coquer OkLuis Antonio Chiapas GarciaNessuna valutazione finora
- 3NA3805 Datasheet EsDocumento4 pagine3NA3805 Datasheet EsLuis Antonio Chiapas GarciaNessuna valutazione finora
- Uslg CoquerDocumento12 pagineUslg CoquerLuis Antonio Chiapas GarciaNessuna valutazione finora
- 02 - 01 - Bases - 86923-Min20-2020-1Documento88 pagine02 - 01 - Bases - 86923-Min20-2020-1Luis Antonio Chiapas GarciaNessuna valutazione finora
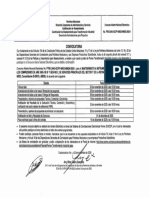
- 01 Convocatoria 86923 MIN20-2020-1Documento1 pagina01 Convocatoria 86923 MIN20-2020-1Luis Antonio Chiapas GarciaNessuna valutazione finora
- ArmarioDocumento3 pagineArmarioLuis Antonio Chiapas GarciaNessuna valutazione finora
- 6SL3210-1KE18-8AP1 Datasheet Es enDocumento3 pagine6SL3210-1KE18-8AP1 Datasheet Es enLuis Antonio Chiapas GarciaNessuna valutazione finora
- 3SU11004BL111NA0 Datasheet EsDocumento5 pagine3SU11004BL111NA0 Datasheet EsLuis Antonio Chiapas GarciaNessuna valutazione finora
- MX4MT... A Ficha TécnicaDocumento1 paginaMX4MT... A Ficha TécnicaLuis Antonio Chiapas GarciaNessuna valutazione finora
- 3NH4030 Datasheet EsDocumento3 pagine3NH4030 Datasheet EsLuis Antonio Chiapas GarciaNessuna valutazione finora
- Gestión de Energía SIMATICDocumento42 pagineGestión de Energía SIMATICLuis Antonio Chiapas GarciaNessuna valutazione finora
- ED63A050Documento44 pagineED63A050Ronald CatacoraNessuna valutazione finora
- Controladores BásicosDocumento33 pagineControladores BásicosLuis Antonio Chiapas GarciaNessuna valutazione finora
- CCM TIASTAR General SUMMAA 2017Documento4 pagineCCM TIASTAR General SUMMAA 2017Luis Antonio Chiapas GarciaNessuna valutazione finora
- Controladores AvanzadosDocumento41 pagineControladores AvanzadosLuis Antonio Chiapas GarciaNessuna valutazione finora
- XMS Serie Español PDFDocumento3 pagineXMS Serie Español PDFLuis Antonio Chiapas GarciaNessuna valutazione finora
- 9904 - Ooh941 - PDFDocumento6 pagine9904 - Ooh941 - PDFLuis Antonio Chiapas GarciaNessuna valutazione finora
- XTRI-Series Data Sheet PDFDocumento4 pagineXTRI-Series Data Sheet PDFLuis Antonio Chiapas GarciaNessuna valutazione finora
- 9900 - Oh921 - CerberusDocumento4 pagine9900 - Oh921 - CerberusLuis Antonio Chiapas GarciaNessuna valutazione finora
- XTRI-M Data SheetDocumento4 pagineXTRI-M Data SheetLuis Antonio Chiapas GarciaNessuna valutazione finora
- 9902 - Op921 - CerberusDocumento4 pagine9902 - Op921 - CerberusLuis Antonio Chiapas GarciaNessuna valutazione finora
- BR SIMATIC PCS7 Es 2017 WebDocumento92 pagineBR SIMATIC PCS7 Es 2017 WebLuis Antonio Chiapas GarciaNessuna valutazione finora
- 9905 - Fdcio422 - PDFDocumento4 pagine9905 - Fdcio422 - PDFLuis Antonio Chiapas GarciaNessuna valutazione finora
- 9901 - Hi921 - CerberusDocumento4 pagine9901 - Hi921 - CerberusLuis Antonio Chiapas GarciaNessuna valutazione finora
- 9800 - Cerberus PRO Fire Safety System OverviewDocumento8 pagine9800 - Cerberus PRO Fire Safety System OverviewAnonymous 8RFzObvNessuna valutazione finora
- SIMATIC NET IKPI Chap 02 Spanish 2015 PDFDocumento926 pagineSIMATIC NET IKPI Chap 02 Spanish 2015 PDFLuis Antonio Chiapas GarciaNessuna valutazione finora
- Gottfried Leibniz ExposicionDocumento7 pagineGottfried Leibniz ExposicionPablo AlimañaNessuna valutazione finora
- Aplicación del método de diferencias finitas para el cálculo de placasDocumento12 pagineAplicación del método de diferencias finitas para el cálculo de placasRodrigonavaNessuna valutazione finora
- Calculo de DerivadasDocumento13 pagineCalculo de DerivadasMaríafeYarlaqueNessuna valutazione finora
- Regla de Los Signos de DescartesDocumento13 pagineRegla de Los Signos de DescartesALee MartineezNessuna valutazione finora
- Guía N°6-EdDocumento18 pagineGuía N°6-EdKelly AstochadoNessuna valutazione finora
- Diferenciación de FuncionesDocumento71 pagineDiferenciación de FuncionesAMYNNXXXXNessuna valutazione finora
- Capt 5 Aplicaciones de La DerivadaDocumento19 pagineCapt 5 Aplicaciones de La DerivadaPaolo Andrés Pancho RamírezNessuna valutazione finora
- Ejercicios 14.3: DefiniciónDocumento3 pagineEjercicios 14.3: DefiniciónFranciscoTestaNessuna valutazione finora
- Aplicaciones Del Cálculo y Estadística Sesión 2-Semana 1Documento23 pagineAplicaciones Del Cálculo y Estadística Sesión 2-Semana 1Ditmar Juarez100% (1)
- Análisis de ingresos totales y márgenes de una empresa mediante funciones y derivadasDocumento12 pagineAnálisis de ingresos totales y márgenes de una empresa mediante funciones y derivadasAngelica Herrera50% (8)
- Guia de CalculoDocumento30 pagineGuia de Calculoalberto_soto_2011Nessuna valutazione finora
- APORTE - Cristian OsorioDocumento4 pagineAPORTE - Cristian OsorioJorge Fabricio Prieto CifuentesNessuna valutazione finora
- Maximos y Minimos, Calculo y AplicacionesDocumento2 pagineMaximos y Minimos, Calculo y AplicacionesCarlos Javier Mandujano LeijaNessuna valutazione finora
- Demidovich. Problemas y Ejercicios de Análisis Matemático - BancoDocumento18 pagineDemidovich. Problemas y Ejercicios de Análisis Matemático - Bancomiguel angel0% (1)
- Derivada función real aprenderDocumento2 pagineDerivada función real aprenderFiorella LópezNessuna valutazione finora
- Curso Calculo III - 02Documento15 pagineCurso Calculo III - 02Miguel BerdugoNessuna valutazione finora
- Métodos numéricos para resolver ecuaciones no linealesDocumento139 pagineMétodos numéricos para resolver ecuaciones no linealesanderjohannNessuna valutazione finora
- Introducción A La Investigación de Operaciones, 9na Edición - Frederick S. Hillier & Gerald J. Lieberman - APENDICEDocumento56 pagineIntroducción A La Investigación de Operaciones, 9na Edición - Frederick S. Hillier & Gerald J. Lieberman - APENDICELuis Angel Espinoza Ramos100% (2)
- Ecuaciones diferenciales paso a pasoDocumento46 pagineEcuaciones diferenciales paso a pasoIvan Dario LoperaNessuna valutazione finora
- DerivadaDocumento57 pagineDerivadaClaudio GómezNessuna valutazione finora
- Resumen de Calculo.Documento56 pagineResumen de Calculo.Jose Luis EstupiñanNessuna valutazione finora
- 1000Documento5 pagine1000fjavierschNessuna valutazione finora
- Programacion Anual 5º SVF 2017Documento10 pagineProgramacion Anual 5º SVF 2017Luis Lengua RamosNessuna valutazione finora
- Mecanismos de desplazamiento de fluidos inmisciblesDocumento118 pagineMecanismos de desplazamiento de fluidos inmisciblesSantiago CastilloNessuna valutazione finora
- Cap 4 DerivadasDocumento6 pagineCap 4 DerivadasDiana HurtadoNessuna valutazione finora
- Optimización Sin Restricciones en Funciones de Una y Varias Variables, Optimización Restringida y Métodos de Aproximaciones LinealesDocumento39 pagineOptimización Sin Restricciones en Funciones de Una y Varias Variables, Optimización Restringida y Métodos de Aproximaciones Linealesfrancisco gomez50% (2)
- Manual HP 50gDocumento986 pagineManual HP 50gCalculadoras100% (2)
- Trabajo Final CalculoDocumento11 pagineTrabajo Final CalculoLaura AuroraNessuna valutazione finora
- Edi-Cap IDocumento37 pagineEdi-Cap IJosue UrciaNessuna valutazione finora
- Modelo de Tasa Corta de Ho & LeeDocumento13 pagineModelo de Tasa Corta de Ho & LeeDavid RinconNessuna valutazione finora