Potrebbero piacerti anche
- Introduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsDa EverandIntroduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsNessuna valutazione finora
- Effect of Strain Rate On The Yield Stress of Structural Steel AsDocumento54 pagineEffect of Strain Rate On The Yield Stress of Structural Steel Asamino222Nessuna valutazione finora
- PAT 322 - Buckling and Post-Buckling AnalysisDocumento26 paginePAT 322 - Buckling and Post-Buckling Analysishakan demirNessuna valutazione finora
- Problem 1 025Documento6 pagineProblem 1 025Oscar SanchezNessuna valutazione finora
- Note On: Second-Order Direct Analysis by NIDADocumento29 pagineNote On: Second-Order Direct Analysis by NIDAPauloAndresSepulvedaNessuna valutazione finora
- CEE 541. Structural Dynamics: Fall 2014Documento4 pagineCEE 541. Structural Dynamics: Fall 2014praveennagarajanNessuna valutazione finora
- A Simplified Look at Partially Restrained Beams - GESCHWINDNER - 1991Documento6 pagineA Simplified Look at Partially Restrained Beams - GESCHWINDNER - 1991mariovalentiNessuna valutazione finora
- Comparative Study On Concentric Steel Braced Frame Structure Due To Effect of Aspect Ratio Using Pushover AnalysisDocumento6 pagineComparative Study On Concentric Steel Braced Frame Structure Due To Effect of Aspect Ratio Using Pushover AnalysisijsretNessuna valutazione finora
- Making Efficient Connections With RBE2 RBE3 Constraint Equations and CBUSH ElementsDocumento24 pagineMaking Efficient Connections With RBE2 RBE3 Constraint Equations and CBUSH ElementsVignesh WaranNessuna valutazione finora
- One Approach To Inelastic Analysis and DesignDocumento19 pagineOne Approach To Inelastic Analysis and DesignbrchiNessuna valutazione finora
- Cufsm Advanced IdeasDocumento23 pagineCufsm Advanced Ideaschristos032Nessuna valutazione finora
- Comparison of Nonlinear Finite Element Modeling Tools For Structural ConcreteDocumento58 pagineComparison of Nonlinear Finite Element Modeling Tools For Structural ConcreteafcisNessuna valutazione finora
- Direct Analysis and Design Using Amplified First Order Analysis2part PDFDocumento27 pagineDirect Analysis and Design Using Amplified First Order Analysis2part PDFPauloAndresSepulvedaNessuna valutazione finora
- CBFEM MC l3 Column-Bases PDFDocumento83 pagineCBFEM MC l3 Column-Bases PDFrk0001Nessuna valutazione finora
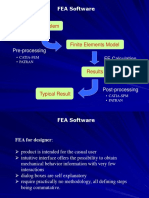
- Process in FEA SoftwareDocumento16 pagineProcess in FEA SoftwareMbok Darmi100% (1)
- Computers and Structures: Hamdolah Behnam, J.S. Kuang, Bijan SamaliDocumento17 pagineComputers and Structures: Hamdolah Behnam, J.S. Kuang, Bijan SamaliSayna KellenyNessuna valutazione finora
- FEM Analysis and Mxy Moments in Concrete DesignDocumento4 pagineFEM Analysis and Mxy Moments in Concrete DesignMarekNessuna valutazione finora
- MODELOS LINK SAP2000 Problem 6 004Documento5 pagineMODELOS LINK SAP2000 Problem 6 004Ruben JqsNessuna valutazione finora
- Documents - MX Computer Program For Determination of Geometrical Properties of Thin Walled 577b0326dd543Documento11 pagineDocuments - MX Computer Program For Determination of Geometrical Properties of Thin Walled 577b0326dd543Marcelo Gimenez MagalhãesNessuna valutazione finora
- Serviceability Behavior and Failure Mechanisms of Concrete Inverted T-Beam Bridge BentcapsDocumento11 pagineServiceability Behavior and Failure Mechanisms of Concrete Inverted T-Beam Bridge BentcapspicottNessuna valutazione finora
- Linear Static, Normal Modes, and Buckling Analysis Using MSC - Nastran and MSC - PatranDocumento4 pagineLinear Static, Normal Modes, and Buckling Analysis Using MSC - Nastran and MSC - PatranHumayun NawazNessuna valutazione finora
- Chicago Comprehensive Guide To Bolt Modeling in Ansys 15 0Documento30 pagineChicago Comprehensive Guide To Bolt Modeling in Ansys 15 0Jesus Crhisty100% (1)
- ADINA Femap InterfaceDocumento136 pagineADINA Femap InterfacesksibalNessuna valutazione finora
- CIE4160 Textbook February 2019Documento371 pagineCIE4160 Textbook February 2019Manank ShahNessuna valutazione finora
- A New Approach To Design For StabilityDocumento39 pagineA New Approach To Design For StabilitytamerragaaNessuna valutazione finora
- Ansys 18.2: Transient Analysis On The BridgeDocumento7 pagineAnsys 18.2: Transient Analysis On The BridgeUsman Khalil50% (2)
- Acknowledgements: Welded Connection Design & Cost EstimationDocumento20 pagineAcknowledgements: Welded Connection Design & Cost EstimationJessica JacksonNessuna valutazione finora
- Lehigh U I: Finite Element Analysis of Elastic-Plastic PlatesDocumento125 pagineLehigh U I: Finite Element Analysis of Elastic-Plastic PlatesRavindra MRNessuna valutazione finora
- Advanced Material Modeling in AbaqusDocumento13 pagineAdvanced Material Modeling in AbaqusUdhamNessuna valutazione finora
- MSC - Software Corporation: Dynamic Analysis Using MSC - Patran and MSC - NastranDocumento8 pagineMSC - Software Corporation: Dynamic Analysis Using MSC - Patran and MSC - NastranroylmechNessuna valutazione finora
- Stability of SpeedCore Walls Under Fire Loading Summary of Numerical AnalysesDocumento13 pagineStability of SpeedCore Walls Under Fire Loading Summary of Numerical Analysesjackcan501Nessuna valutazione finora
- Finite Element Method An Overview PDFDocumento8 pagineFinite Element Method An Overview PDFMuller AsmareNessuna valutazione finora
- L12 - Plastic Analysis PDFDocumento9 pagineL12 - Plastic Analysis PDFSunil Kumar P GNessuna valutazione finora
- Explicit Dynamics Chapter 9 Material Models PDFDocumento54 pagineExplicit Dynamics Chapter 9 Material Models PDFSaiNessuna valutazione finora
- A New Approach For Design of Steel Beam-Columns Our A.Documento32 pagineA New Approach For Design of Steel Beam-Columns Our A.mbrown4382Nessuna valutazione finora
- NX Nastran Dynamic AnalysisDocumento255 pagineNX Nastran Dynamic AnalysisNagrajThadurNessuna valutazione finora
- ANSYS Modal AnalysisDocumento40 pagineANSYS Modal AnalysisG Balaji BalajiNessuna valutazione finora
- A Comparative Study LTB Using AISC EC and SPDocumento8 pagineA Comparative Study LTB Using AISC EC and SPvodugu123Nessuna valutazione finora
- Transient Dynamic Analysis in AnsysDocumento55 pagineTransient Dynamic Analysis in AnsysLandon MitchellNessuna valutazione finora
- Nonlinear Structural Analysis ANSYSDocumento94 pagineNonlinear Structural Analysis ANSYSSer InfinitoNessuna valutazione finora
- Theory of Shear Transfer Strength of Reinforced Concrete PDFDocumento12 pagineTheory of Shear Transfer Strength of Reinforced Concrete PDFPremasiri Karunarathna100% (2)
- Sect 7 LinearRespSpec 09-1Documento43 pagineSect 7 LinearRespSpec 09-1Surya Teja Bulusu100% (1)
- 053 - CE8021, CE6701 Structural Dynamics and Earthquake Engineering - 2 Marks 2Documento116 pagine053 - CE8021, CE6701 Structural Dynamics and Earthquake Engineering - 2 Marks 2Ankit Jose Antony0% (1)
- Stability Analysis and Design of Steel Building Frame Using AISC 2005 Specification PDFDocumento21 pagineStability Analysis and Design of Steel Building Frame Using AISC 2005 Specification PDFvrb126Nessuna valutazione finora
- Chapter 8 - Nonlinear Structural AnalysisDocumento57 pagineChapter 8 - Nonlinear Structural AnalysisDeepak KumarNessuna valutazione finora
- Use of DampingDocumento2 pagineUse of Dampingttotto1100% (1)
- Palmgren MinerDocumento3 paginePalmgren Minerdamec1234Nessuna valutazione finora
- ANSYS Modal AnalysisDocumento40 pagineANSYS Modal AnalysisPavan MutalikdesaiNessuna valutazione finora
- Recommendations For Shear Lag Factors For Longitudinally Welded Tension MembersDocumento22 pagineRecommendations For Shear Lag Factors For Longitudinally Welded Tension MembersSergioAlcantaraNessuna valutazione finora
- Buckling-Restrained Brace and Applications - ToruTakeuchiDocumento20 pagineBuckling-Restrained Brace and Applications - ToruTakeuchimafpdiracNessuna valutazione finora
- (EXTRACT) Ch. VIII Frame Hinge Properties - From CSI (2002) CSI Analysis Reference Manual For SAP2000, Etabs and SafeDocumento12 pagine(EXTRACT) Ch. VIII Frame Hinge Properties - From CSI (2002) CSI Analysis Reference Manual For SAP2000, Etabs and SafeO SNessuna valutazione finora
- Base Isolation On Structures With Soft StoreyDocumento77 pagineBase Isolation On Structures With Soft StoreyDemetris DemetriouNessuna valutazione finora
- Mechanical-Nonlin 13.0 App7A HyperDocumento31 pagineMechanical-Nonlin 13.0 App7A HyperShaheen S. RatnaniNessuna valutazione finora
- AISC 360-2010 PinDocumento3 pagineAISC 360-2010 PinihpeterNessuna valutazione finora
- Welded Continuous Frames and Their Components: by JRDocumento110 pagineWelded Continuous Frames and Their Components: by JRDr Axel ChangNessuna valutazione finora
- Nonlinear Finite Element Analysis and Adina: Proceedings of the 4th ADINA ConferenceDa EverandNonlinear Finite Element Analysis and Adina: Proceedings of the 4th ADINA ConferenceNessuna valutazione finora
- Modern Practice in Stress and Vibration Analysis: Proceedings of the Conference Held at the University of Liverpool, 3–5 April 1989Da EverandModern Practice in Stress and Vibration Analysis: Proceedings of the Conference Held at the University of Liverpool, 3–5 April 1989J. E. MottersheadNessuna valutazione finora
- Model Analysis of Plane Structures: The Commonwealth and International Library: Structures and Solid Body Mechanics DivisionDa EverandModel Analysis of Plane Structures: The Commonwealth and International Library: Structures and Solid Body Mechanics DivisionNessuna valutazione finora
- Advanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionDa EverandAdvanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionNessuna valutazione finora
- Lesson 18 PronunciationDocumento16 pagineLesson 18 Pronunciationhuyen nguyenNessuna valutazione finora
- chương 8 = Biện pháp thi côngDocumento4 paginechương 8 = Biện pháp thi côngHoàng Hồng DươngNessuna valutazione finora
- To Chuc Thi Cong Tru (1) Layout1Documento1 paginaTo Chuc Thi Cong Tru (1) Layout1Hoàng Hồng DươngNessuna valutazione finora
- Finite Element Formulation For BeamsDocumento27 pagineFinite Element Formulation For BeamsPalash JainNessuna valutazione finora
- Consistent UnitsDocumento1 paginaConsistent UnitsHoàng Hồng DươngNessuna valutazione finora
- Adobe Acrobat Pro Student Guide: Bentley Systems Inc. - Academic ProgramsDocumento22 pagineAdobe Acrobat Pro Student Guide: Bentley Systems Inc. - Academic ProgramsHoàng Hồng DươngNessuna valutazione finora
- Emergency Police Emergency Fire ServiceDocumento1 paginaEmergency Police Emergency Fire ServiceHoàng Hồng DươngNessuna valutazione finora
- Bucking Frame PapaerDocumento14 pagineBucking Frame PapaerHoàng Hồng DươngNessuna valutazione finora
- Dep Trai Loi Tai AiDocumento192 pagineDep Trai Loi Tai AiHoàng Hồng DươngNessuna valutazione finora
- GỐC 431-SC02Documento123 pagineGỐC 431-SC02Hoàng Hồng Dương100% (1)
- Academic Word ListDocumento13 pagineAcademic Word ListSơn Lại ThanhNessuna valutazione finora
- Examples of Concrete Element SOLID65 - Hani Aziz AmeenDocumento46 pagineExamples of Concrete Element SOLID65 - Hani Aziz AmeenHani Aziz AmeenNessuna valutazione finora
- Numerical Methods For Civil Engineering PDFDocumento256 pagineNumerical Methods For Civil Engineering PDFJoão Smith VieiraNessuna valutazione finora
- Truss 1Documento1 paginaTruss 1Hoàng Hồng DươngNessuna valutazione finora
- HD Cai DatDocumento1 paginaHD Cai DatHoàng Hồng DươngNessuna valutazione finora
- Ansys Solids2Documento5 pagineAnsys Solids2Brajesh RaghuwanshiNessuna valutazione finora
- Truss 2Documento3 pagineTruss 2Hoàng Hồng DươngNessuna valutazione finora
- Pre-Cracked RC Beams With FRPDocumento8 paginePre-Cracked RC Beams With FRPHoàng Hồng DươngNessuna valutazione finora
- BTDocumento2 pagineBTHoàng Hồng DươngNessuna valutazione finora
- 2 FDP PDFDocumento166 pagine2 FDP PDFBiplav ChoudhuryNessuna valutazione finora
- Speaking Important Cue Cards With Answers - Kiran IELTS PDFDocumento124 pagineSpeaking Important Cue Cards With Answers - Kiran IELTS PDFpuneetastro83% (47)
- FEM Report (FRP)Documento113 pagineFEM Report (FRP)jafar79Nessuna valutazione finora
- Uw Physics 202 Fall 14 Lab ManualDocumento99 pagineUw Physics 202 Fall 14 Lab ManualshaifulNessuna valutazione finora
- An Intuitive Guide To Linear Algebra - BetterExplainedDocumento25 pagineAn Intuitive Guide To Linear Algebra - BetterExplainedvkk intensiveNessuna valutazione finora
- Matching Sentence EndingDocumento6 pagineMatching Sentence EndingLONG BÙINessuna valutazione finora
- Theory of Earth Pressure and Bearing CapacityDocumento10 pagineTheory of Earth Pressure and Bearing CapacityNicu MIHALACHENessuna valutazione finora
- Phy Lab ManualDocumento18 paginePhy Lab Manualkaeshav manivannanNessuna valutazione finora
- Topic 5 - Curvilinear Motion - 2Documento17 pagineTopic 5 - Curvilinear Motion - 2Eugene GarbosaNessuna valutazione finora
- Inverse Square & Cosine LawDocumento12 pagineInverse Square & Cosine LawAdisu0% (1)
- Industrial Refrigeration TrainerDocumento2 pagineIndustrial Refrigeration TrainerEugine BalomagaNessuna valutazione finora
- Pump Performance Datasheet: Operating Conditions LiquidDocumento1 paginaPump Performance Datasheet: Operating Conditions LiquidFabian A NeiraNessuna valutazione finora
- Class 6 Physics: (Lesson Details For Final Exams) : Syllabus: Chapter 2.07, 2.08 and 2.10Documento2 pagineClass 6 Physics: (Lesson Details For Final Exams) : Syllabus: Chapter 2.07, 2.08 and 2.10tasnimNessuna valutazione finora
- Lecture 25 - Steady-State Behavior of Markov ChainsDocumento10 pagineLecture 25 - Steady-State Behavior of Markov ChainsK VirtuosoNessuna valutazione finora
- Collision of Two Balls in A GrooveDocumento8 pagineCollision of Two Balls in A GrooveHanif Daffa BramantyoNessuna valutazione finora
- Hybrid Geosynthetic Paving Mat For Highway ApplicationsDocumento4 pagineHybrid Geosynthetic Paving Mat For Highway ApplicationsmithileshNessuna valutazione finora
- IB Chem2 5 Assess T8Documento3 pagineIB Chem2 5 Assess T8Trúc Hồ100% (3)
- Higher Mathematics Mathematics: PAPER 5 Mechanics 2 (M2)Documento4 pagineHigher Mathematics Mathematics: PAPER 5 Mechanics 2 (M2)JueNessuna valutazione finora
- Review Module 35 - Hydraulics 1 - Part 2Documento1 paginaReview Module 35 - Hydraulics 1 - Part 2Mina, KhristineNessuna valutazione finora
- 1.3 Atomic Mass Atomic Number and Isotopes PDFDocumento23 pagine1.3 Atomic Mass Atomic Number and Isotopes PDFMARVIN DELA CRUZNessuna valutazione finora
- Motion PerceptionDocumento3 pagineMotion PerceptionBrandy SangurahNessuna valutazione finora
- JP 32 91 260Documento5 pagineJP 32 91 260MonikaNessuna valutazione finora
- 21 Casting Defects and How To Prevent Them in Your ProductsDocumento1 pagina21 Casting Defects and How To Prevent Them in Your ProductsmkmkhairiNessuna valutazione finora
- 2005-05 - WPS & PQR C5Documento6 pagine2005-05 - WPS & PQR C5misthahNessuna valutazione finora
- Mathematics Solved TestDocumento10 pagineMathematics Solved TestShayan FarrukhNessuna valutazione finora
- General Physics Phys 1011 Module Freshman CourseDocumento202 pagineGeneral Physics Phys 1011 Module Freshman Coursetirunehawoke8Nessuna valutazione finora
- Engineering Mechanics - KL - Ramachandran SDocumento744 pagineEngineering Mechanics - KL - Ramachandran SFe Fernandez100% (1)
- Wright - Cosmology in AntiquityDocumento206 pagineWright - Cosmology in AntiquityCuca Beludo100% (1)
- Assessment 3: Bearing Stress: InstructionsDocumento5 pagineAssessment 3: Bearing Stress: InstructionsRaynier LigayaNessuna valutazione finora
- Direct Analysis SchemeDocumento4 pagineDirect Analysis SchemeYu PiNessuna valutazione finora
- ITR HV CablesDocumento2 pagineITR HV CablesYulianti Rahmi PurnamawatiNessuna valutazione finora
- Science 4 - Episode 2Documento3 pagineScience 4 - Episode 2Caryll BaylonNessuna valutazione finora
- Physics HL Paper 2 TZ1 MsDocumento15 paginePhysics HL Paper 2 TZ1 MsRishab ParuchuriNessuna valutazione finora