Potrebbero piacerti anche
- Unidad 4 Estado de Deformaciones PDFDocumento36 pagineUnidad 4 Estado de Deformaciones PDFCarlos Perez100% (1)
- Tecnológico Nacional de México Instituto Tecnológico de TapachulaDocumento21 pagineTecnológico Nacional de México Instituto Tecnológico de Tapachulayetter moralesNessuna valutazione finora
- Descripción Matemática de La DeformaciónDocumento35 pagineDescripción Matemática de La DeformaciónAlexis GrijalvaNessuna valutazione finora
- Mecanica de Los Medios Continuos Unidad 4 (2) SAMMYDocumento26 pagineMecanica de Los Medios Continuos Unidad 4 (2) SAMMYzaly robleroNessuna valutazione finora
- Determinación de Elementos MecánicosDocumento8 pagineDeterminación de Elementos Mecánicosjacob castilloNessuna valutazione finora
- Fundamentos de La Mecanica de Los Medios Continuos.Documento41 pagineFundamentos de La Mecanica de Los Medios Continuos.albertito17100% (1)
- Portafolio - U5 - Ecuación Generalizada de Esfuerzo de HookeDocumento8 paginePortafolio - U5 - Ecuación Generalizada de Esfuerzo de HookeOmar Alejandro Guerrero GomezNessuna valutazione finora
- Mecanicadelosmedioscontinuosunidadd5 140526214153 Phpapp02Documento30 pagineMecanicadelosmedioscontinuosunidadd5 140526214153 Phpapp02920430milthonNessuna valutazione finora
- Unidad 3 DinamicaDocumento17 pagineUnidad 3 DinamicaSaul López100% (1)
- Unidad 4. Medios ContinuosDocumento20 pagineUnidad 4. Medios ContinuosJorge AvilaNessuna valutazione finora
- Investigacion Unidad 5Documento16 pagineInvestigacion Unidad 5Anonymous vFKh6eLNessuna valutazione finora
- Unidad 5. Ecuaciones ConstitutivaDocumento33 pagineUnidad 5. Ecuaciones ConstitutivaJairo Márquez67% (3)
- Unidad 4Documento13 pagineUnidad 4Ulises100% (12)
- Mecanica MaterialesDocumento6 pagineMecanica Materialesluis_25hotmailcom50% (4)
- Unidad 4 Cinetica de Sistemas de ParticulasDocumento26 pagineUnidad 4 Cinetica de Sistemas de Particulassplinter360Nessuna valutazione finora
- Ecuaciones de CompatibilidadDocumento12 pagineEcuaciones de CompatibilidadDiana HernandezNessuna valutazione finora
- Unidad 5. Ecuaciones ConstitutivasDocumento36 pagineUnidad 5. Ecuaciones Constitutivasel mata virgenes gusman escobarNessuna valutazione finora
- Unidad 2 FundamentosDocumento27 pagineUnidad 2 FundamentosEmmanuelNessuna valutazione finora
- Unidad 2 FundamentosDocumento27 pagineUnidad 2 FundamentosJuan De Dios Lopez Bailon100% (2)
- 3.4 Esfuerzos y Direcciones Principales.Documento5 pagine3.4 Esfuerzos y Direcciones Principales.Arturo Canseco100% (1)
- Inestabilidad ElasticaDocumento16 pagineInestabilidad ElasticaAndres Mena Lopez Toledo100% (4)
- Unidad 3 Mecanica de Materiales PDFDocumento18 pagineUnidad 3 Mecanica de Materiales PDFAlfonso DominguezNessuna valutazione finora
- Definición de EsfuerzoDocumento9 pagineDefinición de EsfuerzoPoly Gonzalez100% (2)
- Unidad III (Fundamentos)Documento32 pagineUnidad III (Fundamentos)Víctor Flores33% (3)
- Unidad 4 Medios ContinuosDocumento20 pagineUnidad 4 Medios ContinuosPilar Encarnación Baxin100% (1)
- Unidad 5 Equipo5 F M M CDocumento24 pagineUnidad 5 Equipo5 F M M CEDER ALBERTO MALDONADO PIMENTEL0% (1)
- Mecanicadelosmedioscontinuosunidadd5 140526214153 Phpapp02 PDFDocumento30 pagineMecanicadelosmedioscontinuosunidadd5 140526214153 Phpapp02 PDFjavoidea696526Nessuna valutazione finora
- 5.5 Aplicaciones A Problemas de Mecanica de FluidosDocumento12 pagine5.5 Aplicaciones A Problemas de Mecanica de FluidosFrancisco Hernandez100% (1)
- Estatica Unidad 5 Momento de InerciaDocumento4 pagineEstatica Unidad 5 Momento de InerciaJavi Macias100% (1)
- Unidad 1 Mecanica de Materiales InvestigacionDocumento19 pagineUnidad 1 Mecanica de Materiales InvestigacionVicenteNessuna valutazione finora
- Unidad 1 Mecanica de MaterialesDocumento7 pagineUnidad 1 Mecanica de MaterialesAlfredo JimenezNessuna valutazione finora
- 3.2 Descripcion Matematica de La DeformacionDocumento3 pagine3.2 Descripcion Matematica de La DeformacionAbraham Antonio MartinezNessuna valutazione finora
- Fundamentos de La Mecanica de Los Medios ContinuosDocumento10 pagineFundamentos de La Mecanica de Los Medios ContinuosENDIZ ULISES RAMIREZ MADRIGAL100% (2)
- Flexión, Cortante y Torsión en Vigas 3.5 Al 3.11 PDFDocumento5 pagineFlexión, Cortante y Torsión en Vigas 3.5 Al 3.11 PDFDiego Guadalupe GarcíaNessuna valutazione finora
- Unidad 3 Cinetica de ParticulasDocumento3 pagineUnidad 3 Cinetica de ParticulasMONICA LIZCANONessuna valutazione finora
- 6.6presión de Poros o Presión NeutraDocumento14 pagine6.6presión de Poros o Presión NeutraPavel Matias67% (3)
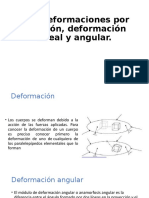
- 3.4. Deformaciones Por Rotación, DeformaciónDocumento10 pagine3.4. Deformaciones Por Rotación, DeformaciónOliver Toledo Rodriguez100% (1)
- La Historia de La Mecanica Del Medio ContinuoDocumento3 pagineLa Historia de La Mecanica Del Medio ContinuoJose Adal Espinoza Espinoza0% (1)
- Elasticidad LinealDocumento8 pagineElasticidad LinealMartin GomezNessuna valutazione finora
- Mecanica de Materiales Unidad 1Documento24 pagineMecanica de Materiales Unidad 1Jonathan Velázquez100% (1)
- Exposicion Unidad 3 Estado de EsfuerzosDocumento40 pagineExposicion Unidad 3 Estado de EsfuerzosJeronimo50% (2)
- Esfuerzo Normal y Deformación LinealDocumento10 pagineEsfuerzo Normal y Deformación LinealMartin Alejandro Ortiz100% (1)
- Mecanica de Los Medios Continuos Unidad 1Documento23 pagineMecanica de Los Medios Continuos Unidad 1gordo258050% (2)
- DIAPOSITIVAS 3.4. DEFORMACIONES POR ROTACIÓN, DEFORMACIÓN LINEAL Y ANGULAR. 3.5. DEFORMACIONES Y DIRECCIONES PRINCIPALES. 3.6. ECUACIONES DE COMPATIBILIDAD-Denisse PérezDocumento20 pagineDIAPOSITIVAS 3.4. DEFORMACIONES POR ROTACIÓN, DEFORMACIÓN LINEAL Y ANGULAR. 3.5. DEFORMACIONES Y DIRECCIONES PRINCIPALES. 3.6. ECUACIONES DE COMPATIBILIDAD-Denisse PérezAmethyst SmithNessuna valutazione finora
- CONCLUSIÓNDocumento1 paginaCONCLUSIÓNmayjoNessuna valutazione finora
- 5.5 Segunda Ley de NewtonDocumento3 pagine5.5 Segunda Ley de NewtonEuardoCar100% (1)
- CamposDocumento9 pagineCamposjulian Cu CaamalNessuna valutazione finora
- Actividad 3 Esfuerzos Normales y Deformaciones LinealesDocumento6 pagineActividad 3 Esfuerzos Normales y Deformaciones LinealesNicol MayoNessuna valutazione finora
- Unidad 3 MECANICA DE MATERIALESDocumento26 pagineUnidad 3 MECANICA DE MATERIALESJacob Sebastian SebastianNessuna valutazione finora
- Navier CauchyDocumento2 pagineNavier CauchyIngrid Margeli NuñezNessuna valutazione finora
- Unidad 6 Vibraciones MecanicasDocumento7 pagineUnidad 6 Vibraciones MecanicasAlejandro Cruz Cruz50% (2)
- Ensayo 2 Cinetica de ParticulasDocumento4 pagineEnsayo 2 Cinetica de ParticulasEdgar G. CorreaNessuna valutazione finora
- Unidad 4 Principio de La MecanicaDocumento18 pagineUnidad 4 Principio de La MecanicaItza Ocaña0% (1)
- Descripción Matemática de La DeformaciónDocumento3 pagineDescripción Matemática de La DeformaciónJulio Cesar73% (11)
- Unidad 4 Mecanica de Materi.Documento15 pagineUnidad 4 Mecanica de Materi.edgararevir1234Nessuna valutazione finora
- Fundamentos de Los Medios Continuos Unidad 5Documento51 pagineFundamentos de Los Medios Continuos Unidad 5Gabo Olvera Monroy50% (2)
- Reporte Unidad 4 Y5 Medios ContinuosDocumento38 pagineReporte Unidad 4 Y5 Medios ContinuosAndry-6193Nessuna valutazione finora
- Descripción Matemática de La DeformaciónDocumento4 pagineDescripción Matemática de La DeformaciónNandaly GarcíaNessuna valutazione finora
- Estado de DeformaciónDocumento7 pagineEstado de DeformaciónRex RyogaNessuna valutazione finora
- Matrices y Determinantes 2Documento7 pagineMatrices y Determinantes 2EduardoNessuna valutazione finora
- Orientacion BocacionalDocumento14 pagineOrientacion BocacionalEduardoNessuna valutazione finora
- 5.-Diferencia Entre Los Pavimentos Flexibles y RiguidosDocumento4 pagine5.-Diferencia Entre Los Pavimentos Flexibles y RiguidosEduardoNessuna valutazione finora
- Cinetica de Los Cuerpos RiguidosDocumento28 pagineCinetica de Los Cuerpos RiguidosEduardoNessuna valutazione finora
- Invest #2Documento5 pagineInvest #2EduardoNessuna valutazione finora
- Cal - Integral U3. Aplicacion de La Integral 2Documento4 pagineCal - Integral U3. Aplicacion de La Integral 2EduardoNessuna valutazione finora
- Modelos de Optimizacion y Recursos U1Documento6 pagineModelos de Optimizacion y Recursos U1EduardoNessuna valutazione finora
- Unidad IV Calculo IntegralDocumento11 pagineUnidad IV Calculo IntegralJuan Jose DominguezNessuna valutazione finora
- TopografiaDocumento4 pagineTopografiaEduardoNessuna valutazione finora
- Simetría Central y AxialDocumento2 pagineSimetría Central y AxialEduardoNessuna valutazione finora
- Algebra Trabajo FinalDocumento38 pagineAlgebra Trabajo FinalEduardoNessuna valutazione finora
- 1 1Documento8 pagine1 1EduardoNessuna valutazione finora
- Transorte AereoDocumento3 pagineTransorte AereoEduardoNessuna valutazione finora
- Nano Química (Propiedades Fisicoquímicas No Convencionales de Polímeros Catenanos y Rotaxanos)Documento1 paginaNano Química (Propiedades Fisicoquímicas No Convencionales de Polímeros Catenanos y Rotaxanos)Gilbert Gonzalez0% (2)
- COMPACTACIÓNDocumento5 pagineCOMPACTACIÓNJesúsGonzálezNessuna valutazione finora
- Uso de La Maquinaria Pesada en La Construccion 2Documento7 pagineUso de La Maquinaria Pesada en La Construccion 2EduardoNessuna valutazione finora
- TopografiaDocumento4 pagineTopografiaEduardoNessuna valutazione finora
- VolteoDocumento1 paginaVolteoEduardo100% (1)
- VolteoDocumento1 paginaVolteoEduardo100% (1)
- Control de Calidad y Diagrama de DispercionDocumento3 pagineControl de Calidad y Diagrama de DispercionEduardoNessuna valutazione finora
- 1 1Documento8 pagine1 1EduardoNessuna valutazione finora
- Potencias y Fuentes de EnergíaDocumento4 paginePotencias y Fuentes de EnergíaEduardoNessuna valutazione finora
- Modelos de Optimizacion y Recursos U1Documento6 pagineModelos de Optimizacion y Recursos U1EduardoNessuna valutazione finora
- Maquinaria para PerforacionDocumento18 pagineMaquinaria para PerforacionEduardoNessuna valutazione finora
- Maquinaria para PavimentacionDocumento15 pagineMaquinaria para PavimentacionEduardoNessuna valutazione finora
- Reseña Sobre Ingenieros DistinguidosDocumento7 pagineReseña Sobre Ingenieros DistinguidosEduardoNessuna valutazione finora
- 1 1Documento8 pagine1 1EduardoNessuna valutazione finora
- Ciment Ac I OnesDocumento17 pagineCiment Ac I OnesEduardoNessuna valutazione finora
- Elementos y Propiedades de Triángulos para Primer Grado de SecundariaDocumento3 pagineElementos y Propiedades de Triángulos para Primer Grado de SecundariaClemencia Eugenia Gutiérrez UribeNessuna valutazione finora
- Laminas Educativas para 6âºDocumento140 pagineLaminas Educativas para 6âºCarmen Castillo100% (1)
- Guía Segundo Ciclo MatemáticasDocumento5 pagineGuía Segundo Ciclo MatemáticasptomasonioNessuna valutazione finora
- Numeros RealesDocumento25 pagineNumeros RealesJean MilanoNessuna valutazione finora
- Razón de CambioDocumento21 pagineRazón de CambioJob GranadosNessuna valutazione finora
- Algeba Lineal Isabel Garcia PlanasDocumento138 pagineAlgeba Lineal Isabel Garcia Planasmanuel garzonaNessuna valutazione finora
- Trayortoria IsogonalesDocumento35 pagineTrayortoria IsogonalesJean P Carrillo GonzalesNessuna valutazione finora
- Analisis Matematico en El Espacio Euclidiano PDFDocumento37 pagineAnalisis Matematico en El Espacio Euclidiano PDFRoberto Fiestas IzaguirreNessuna valutazione finora
- Anual Uni Semana 16 - GeometríaDocumento10 pagineAnual Uni Semana 16 - GeometríaJhordy PabloNessuna valutazione finora
- Guia 7 Rigidos 3DDocumento7 pagineGuia 7 Rigidos 3DGustavo MartinezNessuna valutazione finora
- TEMA 08 - Flujo de Trabajo y Configuración de Planos de Planta y PerfilDocumento36 pagineTEMA 08 - Flujo de Trabajo y Configuración de Planos de Planta y PerfilCESAR AUGUSTO PURIHUAMAN MANAYAYNessuna valutazione finora
- Clase 14. Aplicacion de La Derivada (Comportamiento de Funciones)Documento8 pagineClase 14. Aplicacion de La Derivada (Comportamiento de Funciones)Fernanda TeranNessuna valutazione finora
- Hoja - Semana 5 - 2023-IDocumento2 pagineHoja - Semana 5 - 2023-IAlexia :3 PalominoNessuna valutazione finora
- Circunradioy Volumen 4Documento23 pagineCircunradioy Volumen 4Angeles RosalesNessuna valutazione finora
- Taller 1 Geometrc3ada Analc3adtica 2020 10Documento16 pagineTaller 1 Geometrc3ada Analc3adtica 2020 10HetskuniNessuna valutazione finora
- +formulario de Calculo (Version Pequeña) PDFDocumento1 pagina+formulario de Calculo (Version Pequeña) PDFAnuar HernandezNessuna valutazione finora
- La ElipseDocumento16 pagineLa ElipseSick Muller T BkhbNessuna valutazione finora
- Evaluacion Final Algebra LinealDocumento12 pagineEvaluacion Final Algebra LinealKatty RamirezNessuna valutazione finora
- Ampliamos y Reducimos Figuras en El Plano Cartesiano 13-05-2021Documento8 pagineAmpliamos y Reducimos Figuras en El Plano Cartesiano 13-05-2021Julissa Grissel JugriNessuna valutazione finora
- Heuristic, Matemática y ProblemasDocumento7 pagineHeuristic, Matemática y ProblemasBenigno Jose Villegas TitoNessuna valutazione finora
- 02 Levantamiento Con Wincha y JalonesDocumento11 pagine02 Levantamiento Con Wincha y JalonesItalo Nicson Vasquez TorresNessuna valutazione finora
- 02 Polígonos Áreas y Perímetros Cuarto de PrimariaDocumento6 pagine02 Polígonos Áreas y Perímetros Cuarto de PrimariaLili Guerra CuevasNessuna valutazione finora
- Dependencia e Independencia LinealDocumento4 pagineDependencia e Independencia LinealOscar EduardoNessuna valutazione finora
- Funciones de Segundo GradoDocumento18 pagineFunciones de Segundo GradoGenesis M.Nessuna valutazione finora
- Sem1 RED Teoría Ordenamiento Por PrecedenciaDocumento5 pagineSem1 RED Teoría Ordenamiento Por PrecedenciaMarco Antonio IncaNessuna valutazione finora
- Fisica 2 YjhgDocumento96 pagineFisica 2 YjhgMiranda Castillo100% (1)
- Plan de EstudiosDocumento54 paginePlan de EstudiosmakmasterGNessuna valutazione finora
- Poligonales ViasDocumento12 paginePoligonales ViasDrino NIetoNessuna valutazione finora
- Guía # 3 Matemática y Artística Grado 3ºDocumento25 pagineGuía # 3 Matemática y Artística Grado 3ºMay ValenciaNessuna valutazione finora
- Ejercicios Básicos-DinámicaDocumento5 pagineEjercicios Básicos-DinámicaAlex HDNessuna valutazione finora