Potrebbero piacerti anche
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Dsa Lab 2 StringDocumento1 paginaDsa Lab 2 Stringnaquash1983Nessuna valutazione finora
- Data Structures Lab ManualDocumento60 pagineData Structures Lab Manualnaquash1983Nessuna valutazione finora
- Data Structures Pseudocode Richard Gilberg 41QNxRe9qjLDocumento4 pagineData Structures Pseudocode Richard Gilberg 41QNxRe9qjLnaquash1983Nessuna valutazione finora
- Cse-III-data Structures With C (10cs35) - SolutionDocumento54 pagineCse-III-data Structures With C (10cs35) - Solutionnaquash1983100% (1)
- CGV Lab Manual by Chandrashekar M ADocumento34 pagineCGV Lab Manual by Chandrashekar M Anaquash1983Nessuna valutazione finora
- Adichunchanagiri Institute of EngineeringDocumento2 pagineAdichunchanagiri Institute of Engineeringnaquash1983Nessuna valutazione finora
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- 1100 PDF-How To Solve 2 Dimension Relative Velocity ProblemsDocumento7 pagine1100 PDF-How To Solve 2 Dimension Relative Velocity ProblemsAfia S HameedNessuna valutazione finora
- Real Life Application of Linear AlgebraDocumento9 pagineReal Life Application of Linear AlgebraSeerat BatoolNessuna valutazione finora
- Methods of Problem Solving in KinematicsDocumento7 pagineMethods of Problem Solving in KinematicsVikram AdityaNessuna valutazione finora
- Characteristics of Strong-Motion EarthquakesDocumento13 pagineCharacteristics of Strong-Motion EarthquakeselimosyNessuna valutazione finora
- Physics X NotesDocumento45 paginePhysics X NotesNomi KhanNessuna valutazione finora
- Chapter 6 Mechanism PDFDocumento41 pagineChapter 6 Mechanism PDFAgare TubeNessuna valutazione finora
- Strain CylindricalDocumento4 pagineStrain CylindricalebrahimpanNessuna valutazione finora
- EEE - 23 HW 1Documento4 pagineEEE - 23 HW 1Carlo JimenezNessuna valutazione finora
- Module Checklist - Mechanics - Grade 12Documento7 pagineModule Checklist - Mechanics - Grade 12api-257324866Nessuna valutazione finora
- Chapter 2 Solution - Matlab Programming With Applications For EngineersDocumento7 pagineChapter 2 Solution - Matlab Programming With Applications For EngineersCarolMichalskiNessuna valutazione finora
- Chapter 2Documento27 pagineChapter 2Mainul Islam 312Nessuna valutazione finora
- The 50-Year Anniversary of The PTD: Comments On The PTD's Origin and DevelopmentDocumento11 pagineThe 50-Year Anniversary of The PTD: Comments On The PTD's Origin and DevelopmentMaman SajaNessuna valutazione finora
- Articulo GeofisicaDocumento12 pagineArticulo GeofisicaAndrés Felipe CastroNessuna valutazione finora
- Solutions Manual PDFDocumento964 pagineSolutions Manual PDFfwalker2013100% (1)
- Basic Operations With Force Systems (Short)Documento40 pagineBasic Operations With Force Systems (Short)Kirk JamisonNessuna valutazione finora
- P1370 10S Unit 1 MotionDocumento11 pagineP1370 10S Unit 1 Motiondevbones18Nessuna valutazione finora
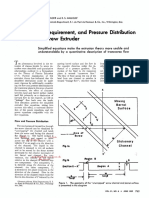
- Flow,: Power Requirement, and Pressure Distribution of Fluid in A Screw ExtruderDocumento6 pagineFlow,: Power Requirement, and Pressure Distribution of Fluid in A Screw ExtruderLê Văn HòaNessuna valutazione finora
- Nonlinear Solid Mech HOLZAPFEL P2Documento139 pagineNonlinear Solid Mech HOLZAPFEL P2bartNessuna valutazione finora
- Three-Phase Transformer Modeling Using Symmetrical ComponentsDocumento7 pagineThree-Phase Transformer Modeling Using Symmetrical ComponentsSatish MoupuriNessuna valutazione finora
- Problem Set 3Documento4 pagineProblem Set 3ReemALMousawiNessuna valutazione finora
- Vector 1 - by TrockersDocumento58 pagineVector 1 - by TrockersFerguson UtseyaNessuna valutazione finora
- Cheng - Field and Wave Electromagnetics 2ed Bab 6&7Documento110 pagineCheng - Field and Wave Electromagnetics 2ed Bab 6&7aacruNessuna valutazione finora
- Tensores Parte 2Documento45 pagineTensores Parte 2Víctor Manuel Osorio RestrepoNessuna valutazione finora
- Delhi Public School-Bopal, Ahmedabad Assignment Class: XII Vector Algebra Level 1Documento2 pagineDelhi Public School-Bopal, Ahmedabad Assignment Class: XII Vector Algebra Level 1DevanshGanganiNessuna valutazione finora
- Minerals Engineering: M. Torres, A. CasaliDocumento10 pagineMinerals Engineering: M. Torres, A. CasaliCarlosNessuna valutazione finora
- CH 8. Vector & 3-D (Math +2)Documento66 pagineCH 8. Vector & 3-D (Math +2)Dinesh BabuNessuna valutazione finora
- Class XI PHYSICS - Class Assignment TOPIC: - Vector ProductDocumento2 pagineClass XI PHYSICS - Class Assignment TOPIC: - Vector Productsudir_phyNessuna valutazione finora
- EM1 Full Slides (DR - Omar)Documento176 pagineEM1 Full Slides (DR - Omar)AmilaNessuna valutazione finora