Potrebbero piacerti anche
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (120)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Integrated Project ManagProject - Management - in - SAPement in SAP With Noveco ePMDocumento16 pagineIntegrated Project ManagProject - Management - in - SAPement in SAP With Noveco ePMLeontin LeonNessuna valutazione finora
- Spray Nozzle Flow Rate CalculatorDocumento10 pagineSpray Nozzle Flow Rate CalculatorRavindra VasudevaNessuna valutazione finora
- CSS ExercisesDocumento8 pagineCSS ExercisesWarnnie MusahNessuna valutazione finora
- Production and Active Pharmaceutical Ingredients 5EEC Group 1Documento10 pagineProduction and Active Pharmaceutical Ingredients 5EEC Group 1Derrick RamosNessuna valutazione finora
- Patrick C Hall@yahoo - com-TruthfinderReportDocumento13 paginePatrick C Hall@yahoo - com-TruthfinderReportsmithsmithsmithsmithsmithNessuna valutazione finora
- SAP Brazil Localization PortfolioDocumento31 pagineSAP Brazil Localization Portfoliosatishkr14Nessuna valutazione finora
- Self Priming Water Lifting Booster PumpDocumento2 pagineSelf Priming Water Lifting Booster PumpzhelipumpNessuna valutazione finora
- Gravity Analog Dissolved Oxygen Sensor SKU SEN0237 DFRobot Electronic Product Wiki and Tutorial Arduino and Robot WikiDocumento8 pagineGravity Analog Dissolved Oxygen Sensor SKU SEN0237 DFRobot Electronic Product Wiki and Tutorial Arduino and Robot WikihipolitoNessuna valutazione finora
- Work and Power Worksheet: Text Text Text Text Text TextDocumento2 pagineWork and Power Worksheet: Text Text Text Text Text TextJvonta DixonNessuna valutazione finora
- Topographic Map of NeedvilleDocumento1 paginaTopographic Map of NeedvilleHistoricalMapsNessuna valutazione finora
- Project Implementation ScheduleDocumento6 pagineProject Implementation SchedulesamaratulNessuna valutazione finora
- Mazda rx7Documento3 pagineMazda rx7Jon WestNessuna valutazione finora
- K Sera Sera CaseDocumento12 pagineK Sera Sera CaseAditya SinghNessuna valutazione finora
- Diwali Dhamaka (Gaur City) 21 Gifts W.E.F. 15.09.2018Documento1 paginaDiwali Dhamaka (Gaur City) 21 Gifts W.E.F. 15.09.2018Dev RajNessuna valutazione finora
- Classification of Pumps and TurbinesDocumento12 pagineClassification of Pumps and TurbinesKarim SayedNessuna valutazione finora
- MO21 Modcomp2-131217z AMSA Marine OrderDocumento59 pagineMO21 Modcomp2-131217z AMSA Marine OrderpjyotNessuna valutazione finora
- Bisskey ThaicomDocumento8 pagineBisskey Thaicomazroy86Nessuna valutazione finora
- Bittorrent-Like P2P NetworkDocumento41 pagineBittorrent-Like P2P NetworkNguyễn Ngọc GiàuNessuna valutazione finora
- ASOC Exam Study Based On Latest Syllabus IndiaDocumento238 pagineASOC Exam Study Based On Latest Syllabus IndiaBiju Gopi ThilakaNessuna valutazione finora
- Lab ManualDocumento9 pagineLab ManualMohit SinhaNessuna valutazione finora
- ESD PPT HKDocumento11 pagineESD PPT HKHarshvardhan MishraNessuna valutazione finora
- K13 High-Flex Waterproofing SlurryDocumento3 pagineK13 High-Flex Waterproofing SlurryAmila SampathNessuna valutazione finora
- Clearvista UrgentDocumento2 pagineClearvista UrgentkevinNessuna valutazione finora
- 4213 TPS Industrial Thermal BookDocumento76 pagine4213 TPS Industrial Thermal BookDinesh VaghelaNessuna valutazione finora
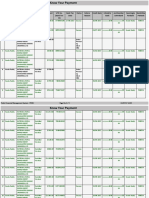
- SR No. Beneficiary Name Scheme Name Purpose Amount Utr No. (Bank TXN Id) Bank TXN Date Status Failure Reason Credit Date Uidasper Bank Acctnumber Asperbank Favoringas Perbank Bankiinas PerbankDocumento3 pagineSR No. Beneficiary Name Scheme Name Purpose Amount Utr No. (Bank TXN Id) Bank TXN Date Status Failure Reason Credit Date Uidasper Bank Acctnumber Asperbank Favoringas Perbank Bankiinas PerbankAnand ReddyNessuna valutazione finora
- Don Honorio Ventura Technological State University: Dr. Enrique G. BakingDocumento1 paginaDon Honorio Ventura Technological State University: Dr. Enrique G. BakingJulianne DucutNessuna valutazione finora
- 13.2.2.13 Lab - Incident HandlingDocumento3 pagine13.2.2.13 Lab - Incident Handlingc583706Nessuna valutazione finora
- How To Get A Non-Professional Driver's License in The Philippines 2014Documento7 pagineHow To Get A Non-Professional Driver's License in The Philippines 2014rkris88Nessuna valutazione finora
- Labtech 20121120 - SS HIRE Bro C 2Documento24 pagineLabtech 20121120 - SS HIRE Bro C 2Carlos PereaNessuna valutazione finora
- FL FX 1961 1976 Parts Book Harley Davidson OPTDocumento239 pagineFL FX 1961 1976 Parts Book Harley Davidson OPTbron nonnamakerNessuna valutazione finora