Documenti di Didattica
Documenti di Professioni
Documenti di Cultura
Sistemas de Ecuaciones
Caricato da
Luis Edu Benavides0 valutazioniIl 0% ha trovato utile questo documento (0 voti)
10 visualizzazioni20 pagineSistemas de Ecuaciones
Copyright
© © All Rights Reserved
Formati disponibili
PDF o leggi online da Scribd
Condividi questo documento
Condividi o incorpora il documento
Hai trovato utile questo documento?
Questo contenuto è inappropriato?
Segnala questo documentoSistemas de Ecuaciones
Copyright:
© All Rights Reserved
Formati disponibili
Scarica in formato PDF o leggi online su Scribd
0 valutazioniIl 0% ha trovato utile questo documento (0 voti)
10 visualizzazioni20 pagineSistemas de Ecuaciones
Caricato da
Luis Edu BenavidesSistemas de Ecuaciones
Copyright:
© All Rights Reserved
Formati disponibili
Scarica in formato PDF o leggi online su Scribd
Sei sulla pagina 1di 20
CAPITULO.
DIEZ
SISTEMAS DE ECUACIONES
DE PRIMER ORDEN
54. GENERALIDADES SOBRE SISTEMAS
Uno de los conceptos fundamentales del andlisis es el de sistema de n ecua-
ciones diferenciales simultdéneas de primer orden. Si y,(x), v0), ---, »,(%) son
funciones desconocidas de una sola variable independiente x, el sistema mas
general de interés para nosotros es aquel cuyas derivadas yi, y$. .... y}, vienen
dadas explicitamente como funciones de x € y,, Ys. 5 Tn:
Yi =A Yay Yar ove Yo)
= hes He Yo ne Yn) a
Yn =F Vy Yay oy Yad
Los sistemas de ecuaciones diferenciales aparecen de forma natural en muchos
problemas cientificos, En la Seccién 22 hemos utilizado un sistema de dos
ecuaciones diferenciales lineales de segundo orden para describir el movimiento
de osciladores arménicos acoplados; en el ejemplo proximo veremos cémo
aparecen en conexién con los sistemas dindmicos con varios grados de libertad;
y en la Seccién 57 los emplearemos para analizar una comunidad bioldgica
sencilla compuesta por diferentes especies animales en interaccidn.
Una importante cuestién al estudiar sistemas es que una tnica ecuacién de
orden
se @)
YO=FO yr y's
437
438 = ECUACIONES DIFERENCIALES
siempre se puede considerar como caso especial de (1). En efecto, pongamos
Fe HN ts ye? ())
y observemos que (2) es equivalente al sistema
4
et @)
Ya =F Yo Yar 1 Indy
que es evidentemente un caso particular de (1). La afirmacién de que (2) y (4)
son equivalentes quiere decir lo siguiente: si y(x) es una solucién de (2),
entonces las funciones y,(x), y,(x), .... y,(x) definidas por (3) satisfacen la
ecuacién (4); y, reciprocamente, si y,(x), y,(x), .... y,(x) satisfacen (4), entonces
yQ) =y,(x) es solucién de (2).
Esta reduccién de una ecuacién de orden n a un sistema de n ecuaciones
de primer orden tiene varias ventajas. Lo ilustramos considerando la relacién
entre los teoremas de exisiencia y unicidad para el sistema (1) y para la
ecuacién (2).
Si se fija un punto x=, y se asignan arbitrariamente valores a las funcio-
nes desconocidas
NG) =i, Y2%) = Ay ny Wy) = 4, (3)
de manera tal que las funciones f,, f,, .... f, estén definidas, entonces (1) da los
valores de las derivadas yi(x,), yS(%q), «.. (x). La semejanza entre esta situa-
ci6n y la discutida en Ia Seccién 2 sugiere el siguiente andlogo del teorema de
Picard.
Teorema A. Sean las funciones f,, fy «.. f, y sus derivadas parciales 3f,/ey,,
Fl Ops vrs Of BY 0 oon OF / OY, Continuas en una region R del espacio (x, yy, Vos 5 Ys
Si (gy 3 dy 5 Gy) €8 uN punto interior de R, el sistema (1) tiene una tinica solucion
VG), YG), 40) que satisface las condiciones iniciales (5).
No demostraremos este teorema, pero queremos advertir que una vez preparado
el terreno su demostracién es idéntica a la del teorema de Picard del Capi-
tulo 13, Ademés, en virtud de la anterior reduccién, el Teorema A incluye como
caso especial el siguiente teorema correspondiente para la ecuacién (2).
Teorema B. Sean la funicidn f y sus derivadas parciales Off dy, off2y', ..., Of av?»
continuas en una region R del espacio (x, Y, Y's ws Y). Si (ip, yy May ons ty) €
et punto interior de R, la ecuacién (2) tiene una iinica solucion y(x) que satisface
las condiciones iniciales yx) = dys ¥'Uig) = day an YQ) =
SISTEMAS DE ECUACIONES DE PRIMER ORDEN 439
Como ilustracién adicional de las ventajas de reducir ecuaciones diferen-
ciales de orden alto a sistemas de ecuaciones de primer orden, consideremos
al famoso problema de n cuerpos de la mecénica clésica.
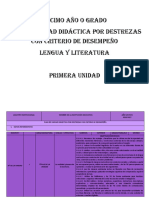
Sean n particulas de masas m, situadas en los puntos (x;, y;, z,) ¥ supongamos
que se atraen mutuamente de acuerdo con la ley de gravitacion de Newton. Si
r, denota la distancia entre m; y m;y @ es el angulo desde el semicje x positive
hasta el segmento que las une (Fig. 63), la componente x de la fuerza ejercida
sobre m, por m, es
Gam gg — Gmnersy =)
% ‘
siendo G la consiante de la gravitacién. Como Ia suma de esas componentes
para todo j +i es igual a m,(d’x,/dt?), tenemos n ecuaciones de segundo orden
ae.
iti
y andlogamente
Gp In
Figura 63
440 ECUACIONES DIFERENCIALES
Si denotamos v,, = dx//dt, vy, =dy,/dt y v,,=dx,/dt y aplicamos la reduccién
anterior, obtenemos un sistema de 6n ecuaciones de primer orden de la for-
ma (1) en las funciones incégnitas xy, ¥e.5 sur yy Vaye Viv Vyye vo Yon Yaye Zo
¥z,5 sos Zs Vs,» Si ahora hacemos uso de que
13 = [6-2 + 0,-yP +@ -— 2%,
el Teorema A nos Ileva a la siguiente conclusin: si se dan las posiciones
iniciales y las velocidades iniciales de Jas particulas, 0 sea, los valores de las
funciones desconocidas en un cierto instante t= iy, ¥ Si las particulas no coli-
sionan (en el sentido de que 7;, no se anula), sus posiciones y velocidades
Posteriores quedan univocamente determinadas. Esta conclusién subyace en la
otra popular filosofia del determinismo mecanicista, segtin el cual ¢l universo
ho es sino una gigantesca maquina cuyo futuro est inexorablemente fijado por
su estado en un instante cualquiera '.
PROBLEMAS
1, Sustituir cada una de estas ecuaciones diferenciales por un sistema equivalente de
ecuaciones de primer orden:
@) y'—2xy'—»
@) y=y"—<0'7.
2 Si una particula de masa m se mueve por el plano xy, sus ecuaciones de movi-
miento son
2, e
m GaN, “vy yo m 3 = alt, XY),
donde f y g representen las componentes x e y, respectivamente, de la fuerza que
actiia sobre la particula. Reemplazar ese sistema de dos ecuaciones de segundo
orden por un sistema equivalente de cuatro ccuaciones de primer orden del tipo (1).
' Condujo también a Sir James Jeans a definir el universo como «un sistema autorresuelto de
GN conaciones diferenciales simulténcas, donde N es el nimero de Eddington», Sir Arthur Edding-
ton afirmé (con més poesfa que verdad cientifica) que
3
N== x 136 x 25"
¢s el mimoro total de particulas de materia en el universo. Véase Jeans, The Astronomical Horizon,
Oxford University Press, Londres, 1945; 0 Eddington, The Expanding Universe, Cambridge Uni-
versity Press, Londres, 1952.
SISTEMAS DE ECUACIONES DE PRIMER ORDEN 441.
85. SISTEMAS LINEALES
Por razones de conveniencia y claridad, nos limitamos en el resto del capitulo
a sistemas de s6lo dos ecuaciones de primer orden en dos funciones incdgnitas,
de Ja forma
Bre, xy)
j
G = at, x»).
El hecho de colocarlas entre llaves sirve para hacer énfasis en que las dos
ecuaciones diferenciales van juntas, y el uso de ¢ para la variable independiente
y de x, y para las dependientes es usual por motivos que quedarén claros més
adelante.
En esta seccién y en la préxima nos especializamos todavia més, tratando
s6lo sistemas lineales, es decir, de la forma
dx
Fade + Oy +40
: @)
= a+ BOY + 00:
Supondremos en la discusién que sigue, y en los teoremas que vamos a enun-
ciar, que las funciones a(i), b(0) y f(t), 1=1, 2 son continuas en un cierto
intervalo cerrado [a, b] del eje x. Sif) y Fd) son idénticamente cero, el
sistema (2) se lama homogéneo; en caso contrario, se dice que es inhomogéneo.
Una solucién de (2) en [a, b] es, claro est, un par de funciones x(2), y(@) que
satisfacen las ecuaciones (2) sobre ese intervalo, Escribiremos una tal solucién
como
Asi, por ejemplo, es facil verificar que el sistema lineal homogéneo (con
coeficientes constantes)
dx
eg
aay
‘ @)
DF aart
442 ECUACIONES DIFERENCIALES
admite a
sath =e
=e x =e
4
fest oe
como soluciones sobre cualquier intervalo cerrado.
Damos ahora un breve esbozo de la teorfa general de los sistemas linea-
les (2). Notese que esta teorfa es muy similar a la de las ecuaciones lineales
de segundo orden analizada en las Secciones 14 y 15. Comenzamos enunciando
el siguiente teorema fundamental de existencia y unicidad, demastrado en el
Capitulo 13.
Teorema A. Si ty es cualquier punto del intervalo [a, Bl yy yy son niimeros
arbitrarios, (2) tiene una y sélo una solucién
pr = x(0)
= yO,
vdlida en [a, b) tal que x69) =x € Yl) = Yo.
Nuestro préximo objetivo cs estudiar la estructura de las soluciones del
sistema homogéneo obtenido de (2) al suprimir los términos (0) y ft):
dk
nate + Oy
. ()
ly i
m7 adx+ bdy.
Es obvio que (5) admite la llamada solucién trivial, en la que x(f) e y(2) se
toman idénticamente nulas. A la hora de encontrar soluciones més interesantes
que la trivial es importante el préximo teorema.
Teorema B. Si el sistema homogénen (5) tiene dos sohciones
e= (0) f =x
6)
. =10 7 b=x0
sobre |a, b], entonces
. Fer +o) fo)
Y= an + cyl
es también solucion en (a, 6] para todo par de constantes ¢, y cy
Demostracién, La dejamos al cuidado del lector por ser una mera comprobacidn,
SISTEMAS DE ECUACIONES DE PRIMER ORDEN = 443,
La solucién (7) se obtiene del par de sohiciones (6) multiplicando la primera
por ¢,, la segunda por ¢,, y sumando; por eso se lama a (7) una combinacién
lineal de las soluciones (6). Con esta terminologia, podemos reformular el
Teorema B asf: toda combinacién lineal de dos soluciones del sistema homo-
géneo (5) es también solucién. Segtin eso, (3) tiene
x= ce" + ce”
{ sete ®
y= ce" + Beye
como solucién para toda eleccidn de las constantes c, y c.
La siguiente cuestién a dilucidar es si (7) contiene sodas las soluciones
de (5) sobre [a, b], es decir, si es la solucién general de (5) sobre [a, b]. Por
el Teorema A, (7) sera Ja solucién general si las constantes ¢, y c, se pueden
escoger de modo que se satisfagan condiciones arbitrarias x(t) = xy. y(t) = Yo
en un punto arbitrario t, de [a, b], 0 lo que es equivalente, si el sistema de
ecuaciones algebraicas lineales
€1% (Tq) + CXa("q) = Xo
ello) + C2Y2llo) = Yo
en las inedgnitas c, y c, se puede resolver para todo f, en [a, h] y todo par de
numeros x), Yo. Por la teoria de determinantes sabemos que ello es posible
siempre que el determinante de los coeficientes
x x,(t)
uO y2lt)
Wit) =
no se anule sobre el intervalo [a, b]. Ese determinante se lama wronskiano de
las dos soluciones (6) (véase Problema 4), y las observaciones precedente
conducen al préximo teorema.
Teorema C. Si ei wronskiano W(1) de las dos soluciones (6) del sistema homo-
géneo (5) no se anula en [a, b], entonces (7) es la solucién general de (5) sobre
ese intervalo.
Se deduce de este teorema que (8) es la solucién general de (3) sobre cualquier
intervalo cerrado, ya que el wronskiano de las soluciones (4) es
444 ECUACIONES DIFERENCIALES
que nunca se hace cero, Resulta til saber, como sugiere este ejemplo, que la
anulacién 0 no del wronskiano W(¥) de dos soluciones no depende de la
eleccin de t. Mis concretamente:
Teorema D. El wronskiano W(t) de dos soluciones (6) del sistema homogéneo (5)
o bien es idénticamente cero sobre [a,b] 0 no se anula en ningtin punto de [a, bl.
Demostracién. Un sencillo cdleulo muestra que W(¢) satisface la ecuacién diferen-
cial de primer orden
dw
= la) + &(O1W, @e
de donde se desprende que
WE) =collalorsenae (10)
para alguna constante c. La conclusién del teorema es ya evidente por cuanto el
factor exponencial en (10) no se anula en ningtin punto.
El Teorema C proporciona un modo adecuado de verificar si (7) ¢s la
solucién general de (5): probar que el wronskiano W(#) de las dos soluciones (6)
no es nulo, A continuacién desarrollamos un criterio equivalente que suele ser
mas directo y mas conveniente.
Las dos soluciones (6) se dicen linealmente dependientes en [a, b] si una
de ellas es miltiplo constante de la otra en el sentido de que
210 = kx) 2d) = kx,()
© bien
nO=bO IAD = ky
para alguna constante k y para todo z en [a, b], y inealmente independientes
si ninguna de ellas es miltiplo constante de la otra. La dependencia lineal es
claramente equivalente a que existan dos constantes c, y c,, alguna de ellas al
menos no nula, tales que
ex) + ex) =0
ay
ey Fey) =0
para todo 7 en [a, 5]. Ahora tenemos el siguiente teorema.
Teorema E. Si las dos soluciones (6) del sistema homogéneo (5) son linealmente
independientes en |a, bl, entonces (7) es la solucién general de (5) sobre ese
intervalo.
SISTEMAS DE ECUACIONES DE PRIMER ORDEN 445
Demostracién. En vista de los Teoremas C y D, basta probar que las solucio-
nes (6) son linealmente dependientes si y s6lo si su wronskiano W() es idéntica-
mente cero. Comenzamos suponiendo que son linealmente dependientes, es decir,
20 = ky
MO = kyl).
(L2y
Entonces
20 ©@] _ [BAD 1)
i) wO! |b) yO
= halts — key) = 0
wo
para todo ¢ en [a, 6]. El mismo argumento funciona si la constante k esta al otro
lado de la ecuacién (12). Supongamos ahora que W() es idénticamente cero, y
vamos a probar que las soluciones (6) son linealmente cependientes on el sentido
de las ecuaciones (11). Fijemos un punto , en [a, 6]. Como Wii.) =0, el sistema
de ecuaciones algebraicas lineales
1A (tp) + Cox) = 0
Cy ilto) + CVU) = 0
tiene una solucién ¢,, ¢; en la que estos niimeros no son ambos cero. Asf pues, la
solucién de (5) dada por
f =e) tery a3)
y= ey + cys)
es igual a la solucién trivial en f,, Se sigue de la parte de unicidad del Teore-
‘ma A que (13) debe ser la solucién trivial sobre el intervalo [a, B], de modo
que (L1) es vilida y la demostracién esta completa.
El valor de este ctiterio estriba en que en problemas concretos suele ser cuestion
de simple inspeccién el decidir si dos soluciones de (5) son linealmente inde-
pendientes o no.
Volvemos ya al sistema inhomogéneo (2) para concluir la discusién con el
siguiente resultado.
Teorema F. Si las dos soluciones (6) de! sistema homogéneo (5) son linealmente
independienies sobre [a, b] y si
446 ECUACIONES DIFERENCIALES
es cualquier solucién particular de (2) en ese intervalo, entonces
{ = onl) Hex) +x, 08;
= Eyl) + cy + yp)
es ta solucién general de (2) en (a, b).
Demostracién. Es suficiente probar que si
es una solucién arbitraria de (2), entonces
f =x) 20
=O yO
5 solucién de (5), y dejamos Ja verificacién al lector.
El tratamiento anterior del sistema lineal (2) muestra cémo se puede cons-
truir su solucion general a partir de piezas mas simples. Pero gc6mo hallar esas
piezas simples? Por desgracia, como en el caso de las ecuaciones lineales de
segundo orden, no hay ningiin método general que funcione siempre. En la
proxima seccién presentamos un caso especial importante en el que esa difi-
cultad puede solventarse: aquel en que los coeficientes a{z). b(2), i= 1, 2 son
constantes.
PROBLEMAS
1. Demostrar el Teorema B.
2. Terminar la demostracién del Teorema F.
3. Verificar la ecuacién (9).
4. Consideremos la ecuacién lineal de segundo orden
ax
ah Rt ae =0 i)
ae (Op + DOr = ¢
reducida al sistema
@)
QtOx — POY.
SISTEMAS DE ECUACIONES DE PRIMER ORDEN 447
Sim (0, x0) son soluciones de la ecuaci6n (*) y si
x= xy)
= x f
son las correspondientes soluciones de (**), probar que el wronskiano de las pri-
meras, en el sentido de la Seccidn 15, es precisamente el wronskiano de las segundas
en el sentido de esta seccién.
(@)_ Probar que
son soluciones del sistema homogéneo
ar
wot
(b) Demostrar por dos caminos que las soluciones dadas en (a) son linealmente
independientes sobre todo intervalo cerrado y escribir la soluciOn general de
esc sistema.
(ec) Hallar la solucién particular
[x= x(0)
=)
de este sistema para la que x(0)=5 ¢ (0) = 1.
(@) Probar que
pr = Det
‘aa x
son soluciones del sistema homogéneo
a
ate
ECUACIONES DIFERENCIALES
(b) Probar de dos formas que las soluciones dadas en (a) son linealmente inde-
©
7. Obtener las soluciones dadas en el Problema 6 para el sistema homogéneo
@
(b)
pendientes sobre todo intervalo cerrado y escribir la solucién general de ese
sistema.
Comprobar que
=3-2
= +3
es una solucién particular del sistema inhomogéneo
de
Daxt2ytt-1
a
d
ar + 2y— 51-2,
a
y escribir la solucién general de este sistema.
derivando 1a primera ecuacién en 7 y eliminando y;
derivando la segunda ecuacién en ty climinando x.
8. Usar el método sugerido por el Problema 7 para hallar la solucién general del
sistema
% (a)
(b)
a,
ere
d)
“we
Hallar la solucién general del sistema
dx
dt
dy
a
Probar que cualquier ecuacién de segundo orden obtenida del sistema cn (a)
no es equivalente a ese sistema, en el sentido de que tiene soluciones que no
forman parte de ninguna solucién del sistema. Asi pues, si bien las ecuaciones
de orden superior son equivalentes a sistemas, el recfproco no ¢s cierto y los
sistemas son mas generales.
SISTEMAS DE ECUACIONES DE PRIMER ORDEN 449.
56. SISTEMAS LINEALES HOMOGENEOS
CON COEFICIENTES CONSTANTES
Ya estamos en disposicién de dar una solucién completa de! sistema
ax
qn t by
@
Beet
donde a), 6, @, ¥ by son constantes dadas, Algunos de los problemas de la
secci6n anterior ilustran un procedimiento que es aplicable a menudo en este
caso: derivar una ecuacién, eliminar una de las variables dependientes y resol-
ver Ja ecuacién lineal de segundo orden resultante. En lugar de eso, el método
que ahora presentaremos est basado en la construccién de un par de soluciones
linealmente independientes directamente a partir del sistema dado.
Si recordamos que la funcién exponencial se reproduce. salvo un factor,
bajo derivacién (véase la Secci6n 17), es natural buscar soluciones de (1) del
tipo
{ (2)
Sustituyendo (2) en (1) obtenemos
Ame" = a,Ae™ + b,Be™
Bre™ = ayAe™ + b,Be™;
y dividiendo por e” resulta el sistema lineal algebraico
(a,—m)A+bB=0
@)
aA + (b,— mB =0
en las incégnitas A y B, Bs claro que (3) admite la solucién trivial A=B = 0,
que produce en (2) la solucién trivial de (1). Como estamos buscando solucio-
nes no triviales de (1), eso no nos sirve para nada. Sin embargo, sabemos
que (3) tiene soluciones no triviales siempre que el determinante de los coefi-
cientes se anula, 0 sea, cuando
450 = ECUACIONES DIFERENCIALES
Al desarrollar este determinante obtenemos la ecuacién cuadratica
wt — (a, + b,)m + (a,b, — ayb,) =0 4)
en la incégnita m. Por analogfa con lo visto antes, Ilamaremos a esta ecuacién
la ecuacién auxiliar del sistema (1). Sean m, y my, las raices de (4). Si susti-
tuimos m en (3) por m,, sabemos que las ecuaciones resultantes tienen una
solucién no trivial A,, B,, es decir, que
x= Ae!
5
es una solucién no trivial del sistema (1). Procediendo andlogamente con m,
hallamos otra solucién no trivial
mageme
f = ma . 6)
=Bye™.
Para estar seguros de haber obtenido dos soluciones lincalmente independiente,
y por tanto la solucién general, es necesario examinar en detalle las tres posibi-
lidades para m, y my,
Raices reales distintas. Cuando m, y m, son néimeros reales distintos, se ve
facilmente que (5) y (6) son linealmente independientes (por qué?) y
X= eAye™ + eyAye”™" ee
y= ¢,Bye™ + c,B,e"
es la solucién general de (1).
Ejemplo 1. En el caso del sistema
ary
dr
a @)
BY =
ges
es
(-mA+B=0
@)
4A +(-2—m)B=0.
La ecuacién auxiliar es
mn +m—6=0, o sea, (m+3)Qn—2)=0,
SISTEMAS DE ECUACIONES DE PRIMER ORDEN 451.
asf que m, y m, son —3 y 2. Con m= —3, (9) se convierte en
10)
como solucién no trivial de (8). Con m= 2, (9) se convierte en
-A+B=0
4A—4B=0,
y una soluci6n no trivial es A= 1, B= 1. Esto da
ay
como otra solucién de (8); y como es claro que (10) y (11) son linealmente
independientes,
eu
is + e,c% ay
= dee + ce"
es Ja soluciGn general de (8).
Raices complejas distintas. Sim, y m, son nameros complejos distintos, se
pueden escribir en la forma a+ ib con a y b reales y b #0. En este caso
esperamos que los A y B obtenidos de (3) sean niimeros complejos, y tendremos
dos soluciones linealmente independientes
= Ateotion = Agen
. ie yt Fc (13)
y = Bye y= Bye™,
Sin embargo, estas soluciones son complejas. Para extraer soluciones reales,
procedemos como sigue. Si expresamos los nimeros A¥ y B¥ en la forma
A¥= A, +iA, y BY = B, + iB, y usamos la formula de Euler 17-(7), la primera
de las soluciones (13) puede escribirse
[x= (A, +iA)e“(Cos br+i sen bi)
y= (B, + iB,e“(cos br+i sen br),
452 ECUACIONES DIFERENCIALES
0 sea,
x= eM[(A, cos bt— A, sen bi) + iA, sen bt+A, cos bd] aay
=e[(B, cos bf—B, sen bi) +i(B, sen bt +B, cos bid].
Es facil ver que si un par de funciones complejas es solucién de (1), cuyos
coeficientes son constantes reales, sus partes reales e imaginarias son solucio-
nes con valores reales. Se sigue de esto que (14) proporciona las dos soluciones
reales
x= eA, cos bt— A, sen bi) ees)
y=e"(B, cos bt—B, sen bi)
¥
r=e%(A, sen bt+A, cos bf) (16)
x= eB, sen bt +B, cos bt).
Puede probarse que estas soluciones son linealmente independientes (se pide al
lector que lo demuestre en el Problema 3), de modo que la soluci6n general es
en este caso
fore cos br—A, sen bt) +¢,(A, sen bt+A, cos bf)] an
=el[ey(B, cos bt—B, sen bt) + c(B, sen bt +B, cos br)}.
Como ya hemos encontrado la solucién general, no es preciso considerar la
segunda de las soluciones (13).
Raices reales iguales. Cuando m, y m, tienen el mismo valor m, (5) y (6) no
son linealmente independientes y obtenemos esencialmente s6lo una solucién
a 7
Ly = Be",
Nuestra experiencia en Ja Seccién 17 nos invita a esperar una segunda solucién
Tinealmente independiente de la forma
= Ate™
ly = Bie™.
SISTEMAS DE ECUACIONES DE PRIMER ORDEN 453
Desgraciadamente, las cosas no son tan sencillas y debemos buscar en realidad
una segunda solucién de la forma
x= (A, + Ae" ‘19
y=@,+Bpe™,
de manera que la solucién general es
x= c,Ae™ + 6,(A, + Aste” 60)
y=c,Be™ + o(B, + Be"?
Las constantes A,, A,, B, y B, se hallan sustituyendo (19) en el sistema (1). En
vez de intentar Ievar a cabo esto en general, mostramos cémo funciona en un
ejemplo particular.
Ejemplo 2. En él caso del sistema
Boyecdy
ad .
Z 1)
I egos
Pea
@)es
G-mjA-4B=0
(22)
A+(-1—mB =0,
La ecuacién auxiliar es
m?—2m+1=0, 0 sea, (m@—1P=0,
con raices iguales ambas a 1. Con m=1 la (22) pasa a ser
2A-4B=0
A-2B=0.
2 La Ginica excepcién a esta afirmacién ocure cuando a, = b= a y d)= b= 0, de modo que
fa ecuacién auxiliar es mi — 2am + a” =0, m=a, y las constantes A y B en (18) quedan libres. En
tal situacién, la solucién general de (1) es obviamente
ie
cae,
y se dice gue el sistema estd desacoplado (ya que cada ecuacién puede resolverse independiente-
‘mente de la otra).
454 ECUACIONES DIFERENCIALES
Una sencilla solucién no trivial de este sistema es A=2, B= 1, de modo que
x= 2et
eh (23)
€s una solucién no trivial de (2). Ahora buscamos una segunda solucién linealmente
independiente de Ja forma
f =(A, + Ane’ 2
=B,+ Boe.
Al sustituir eso en (21) se obtiene
(Ay + Agt + Ave =3(4, + Awe— 4B, + Be!
(B, + Bat + Bye! = (A, + Axe’ —(B, + Bye’,
que se reduce a
(2A, ~ 4B, + (2A, — A, —48,)=0
(A, — 2B, + (A, — 2B, — B,) =0.
Dado que éstas han de ser identidades en la variable ¢, debemos tener
2A,—4B)=0 2A, —A,—4B,=0
A,—2B,=0, A, —28,—B,=0.
Las dos ecuaciones de la izquierda admiten A, = 2, B; = 1 como solucion no trivial.
Con ello, las dos ecuaciones de la derecha se convierten en
2A, — 4B, =2
A, —2B,=1,
asf que podemos tomar A, = 1, B, = 0. Ahora insertamos estos ndmeros en (24), con
lo que resulta
1+ 2Ae*
25)
we (25)
como segunda solucién. Es evidente que (23) y (25) son linealmente independientes,
de modo que
x= eye! + eg(1 + 2het
26)
= eye! + este! Sal
es la solucién general del sistema (21)
SISTEMAS DE ECUACIONES DE PRIMER ORDEN 455,
PROBLEMAS
1. Usar los métodos descritos en esta seccién para hallar la solucién general de los
sistemas que se indican:
(@ ©
ae —2y
@) Qn
4
2 =Sx+2y;
3} (g)
a
Gnas 3y
@ CD)
Pg. oy;
a
2. Probar que la condicién a,b, >0 es suficiente, pero no necesaria, para que el siste-
ma (1) tenga dos soluciones reales linealmente independientes de 1a forma (2).
3, Comprobar que el wronskiano de las dos soluciones (15) y (16) viene dado por
W() = (A,B, — AB ve“,
y probar que A,B, — A,B, #0.
4, Probar que en la f6rmula (20) las constantes A, y B, satisfacen el mismo sistema
algebraico lineal que A y B y que por tanto se puede hacer A)=A y B,=B sin
pérdida de generalidad,
5, Consideremos el sistema lineal inhomogéneo
de
Bn 2OX + OY *hO
: Loo)
4
ae ae + Py +hO
456 ECUACIONES DIFERENCIALES
y el correspondiente sistema homogéneo
dx
Bet Biy
cr)
(ix + Dy.
dy
at
@ Si
son soluciones Tinealmente independientes de (**), ast que
f ex + em
= ey + yal)
es su solucién general, probar que
i =v, 04 @ + 0x0)
=v OO + vOyald)
ser una solucién particular de (“*) si las funciones v,(2) y v,(r) satisfacen el
sistema,
vi, ty =f
Vaya Fay =.
Esta técnica para hallar soluciones particulares de sistemas lineales inhomo-
géneos se lama método de variacién de los parametros.
() Aplicar el método esbozado en (a) para hallar una solucién particular del
sistema inhomogéneo
BE ssp SLD
Bit
a?
dy
DD. xs By = Bp
p48 By 8-8,
cuyo sistema homogéneo asociado resolvimos en el Ejemplo 1.
Potrebbero piacerti anche
- PCA Fisica 1ro BGUDocumento32 paginePCA Fisica 1ro BGULuis Edu Benavides100% (1)
- Estructura de Costos, CD, Ci, CV, CFDocumento20 pagineEstructura de Costos, CD, Ci, CV, CFLuis Edu BenavidesNessuna valutazione finora
- Benavides TrabajoDocumento8 pagineBenavides TrabajoLuis Edu BenavidesNessuna valutazione finora
- TEMARIO DE PREGUNTAS 3bguDocumento5 pagineTEMARIO DE PREGUNTAS 3bguLuis Edu BenavidesNessuna valutazione finora
- Micro 3ro Pca Matematica Bgu 2022Documento10 pagineMicro 3ro Pca Matematica Bgu 2022Luis Edu BenavidesNessuna valutazione finora
- PDCD Bloque 5Documento8 paginePDCD Bloque 5Luis Edu BenavidesNessuna valutazione finora
- Destrezas 10moDocumento88 pagineDestrezas 10moLuis Edu Benavides100% (1)
- Pci ContabilidadDocumento18 paginePci ContabilidadLuis Edu Benavides100% (1)
- Manejo de HilosDocumento15 pagineManejo de HilosLuis Edu BenavidesNessuna valutazione finora
- Planificación Curricular Por Bloques PDFDocumento8 paginePlanificación Curricular Por Bloques PDFLuis Edu BenavidesNessuna valutazione finora
- Deberes de ProgaDocumento20 pagineDeberes de ProgaLuis Edu BenavidesNessuna valutazione finora