Potrebbero piacerti anche
- Actividad 4 Calculo Vectorial - Martin - AnelDocumento19 pagineActividad 4 Calculo Vectorial - Martin - AnelAlejandra Segura Martínez100% (6)
- Esfera 1Documento6 pagineEsfera 1Brett Gonzalez CardenasNessuna valutazione finora
- Actividad 3 Ecuaciones DiferencialesDocumento4 pagineActividad 3 Ecuaciones DiferencialesAndres Camilo Cuyato CuartasNessuna valutazione finora
- ProB 3 5p98Documento4 pagineProB 3 5p98AngelNessuna valutazione finora
- FORCADA, D. - Método de Percusión Afro-Latina Vol. 1Documento114 pagineFORCADA, D. - Método de Percusión Afro-Latina Vol. 1alfonsoroa88100% (1)
- Tablas de DistribucionDocumento12 pagineTablas de DistribucionMichael David CamachoNessuna valutazione finora
- Identidades Vectoriales (Notación Indicial)Documento6 pagineIdentidades Vectoriales (Notación Indicial)Carlos LopezNessuna valutazione finora
- 2GDLDocumento5 pagine2GDLGadiel Armijos VNessuna valutazione finora
- EyM 2°parcial - 2021 1C - Tema 1Documento15 pagineEyM 2°parcial - 2021 1C - Tema 1Fede AlvarezNessuna valutazione finora
- Operadores InversosDocumento5 pagineOperadores InversosCarolina Colquichagua PalacinNessuna valutazione finora
- Ed Exactas y Reducibles A ExactasDocumento14 pagineEd Exactas y Reducibles A ExactasKEVIN JAIR CORREA PALOMINONessuna valutazione finora
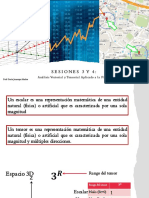
- Sesiones N3 y N4Documento27 pagineSesiones N3 y N4Lev LandauNessuna valutazione finora
- T. de Investigacion - Jhonatan Fasanando R - RDocumento8 pagineT. de Investigacion - Jhonatan Fasanando R - Rjhonatan fasanando tenazoaNessuna valutazione finora
- Espacios VectorialesDocumento38 pagineEspacios VectorialesCatalina UsugaNessuna valutazione finora
- Ejemplos Sistemas Traslacionales y RotacionalesDocumento7 pagineEjemplos Sistemas Traslacionales y RotacionalesYERSON DAVID ROZO GIRALDONessuna valutazione finora
- Formulario Física Cuatrimestre 1Documento4 pagineFormulario Física Cuatrimestre 1cristinaNessuna valutazione finora
- Taller Cinética de PartículasDocumento8 pagineTaller Cinética de Partículasmilton david ochoa madridNessuna valutazione finora
- S04s2-Material - Reglas Básicas de Derivación PDFDocumento13 pagineS04s2-Material - Reglas Básicas de Derivación PDFLuis Chocce PeñaNessuna valutazione finora
- TRANSFORMACIÓNDocumento10 pagineTRANSFORMACIÓNMaria Castro GamarraNessuna valutazione finora
- Tarea 3 301301 226Documento16 pagineTarea 3 301301 226Yerson RinconNessuna valutazione finora
- Resorte HelicoidalesDocumento11 pagineResorte HelicoidalesMiriam LopezNessuna valutazione finora
- Tarea 2 - MatDocumento3 pagineTarea 2 - MatMaryNessuna valutazione finora
- Llontop VDocumento24 pagineLlontop VBenito Llontop SandovalNessuna valutazione finora
- E.inexactas2022 02Documento19 pagineE.inexactas2022 02RUBEN MARCELO VERGARAY MENDOZANessuna valutazione finora
- Diagrama de Bloques - CRISTHIAN QUISPEDocumento10 pagineDiagrama de Bloques - CRISTHIAN QUISPEBrian Condo RamosNessuna valutazione finora
- 1.2. - Cálculo de Areas.Documento6 pagine1.2. - Cálculo de Areas.Ediberto Gordillo HernandezNessuna valutazione finora
- ProB 3 7p98Documento2 pagineProB 3 7p98AngelNessuna valutazione finora
- Taller Diseño de Vigas PDFDocumento1 paginaTaller Diseño de Vigas PDFAndres CasanovaNessuna valutazione finora
- Taller Diseño de Vigas PDFDocumento1 paginaTaller Diseño de Vigas PDFAndres CasanovaNessuna valutazione finora
- Entregable2 ArredondoGarciaDocumento9 pagineEntregable2 ArredondoGarciaDamian AlvarezNessuna valutazione finora
- Sesiones 1 y 2 Del 29-08-22Documento26 pagineSesiones 1 y 2 Del 29-08-22Lev LandauNessuna valutazione finora
- S2-Ecuaciones Diferenciales de Primer GradoDocumento15 pagineS2-Ecuaciones Diferenciales de Primer GradoEsperanza VeraNessuna valutazione finora
- Solución de Parcial N°2Documento34 pagineSolución de Parcial N°2carlos quielNessuna valutazione finora
- Cybort Umiyauri Trabajo Analisis Matematico 2 XDDocumento12 pagineCybort Umiyauri Trabajo Analisis Matematico 2 XDBradson EloyNessuna valutazione finora
- Variables de EstadoDocumento12 pagineVariables de EstadoChristian SaraguroNessuna valutazione finora
- Ejercicio 2.13Documento8 pagineEjercicio 2.13FernandoBunayNessuna valutazione finora
- Practico N°3 Calculo I....Documento13 paginePractico N°3 Calculo I....Alex Eduardo Calderon100% (1)
- Parcial II (Cesar Brizuela)Documento14 pagineParcial II (Cesar Brizuela)Cesar BrizuelaNessuna valutazione finora
- Tarea 1 U2 ResumenDocumento12 pagineTarea 1 U2 Resumenangel manuel lopez guzmanNessuna valutazione finora
- Mvaco2 U2 Ea JomhDocumento7 pagineMvaco2 U2 Ea JomhJoelAlbertoMontalvoHernandezNessuna valutazione finora
- Calculo Vectorial 5Documento16 pagineCalculo Vectorial 5Alex LemNessuna valutazione finora
- Método de Splines CubicosDocumento9 pagineMétodo de Splines CubicosGUERRA UNTOJA SANDRA NOEMINessuna valutazione finora
- S3 Diseño de ControladoresDocumento25 pagineS3 Diseño de ControladoresHAYA QUIÑONES KIMINSON JEAN PIERNessuna valutazione finora
- Derivadas de Funciones ParamétricasDocumento5 pagineDerivadas de Funciones ParamétricasJim Acuña100% (1)
- Universidad Nacional de San Antonio Abad Del Cusco: Trabajo Iv de Control 1Documento6 pagineUniversidad Nacional de San Antonio Abad Del Cusco: Trabajo Iv de Control 1Gabriela MoralesNessuna valutazione finora
- Problema 5-Fuerzas Sobre Superficies Planas y CurvasDocumento8 pagineProblema 5-Fuerzas Sobre Superficies Planas y Curvascarlos quielNessuna valutazione finora
- Matematica Superior Aplicada - TP 1Documento14 pagineMatematica Superior Aplicada - TP 1Soledad GomezNessuna valutazione finora
- Evidencia 1 - Giovanni Melendez Pluma, 5°H.Documento8 pagineEvidencia 1 - Giovanni Melendez Pluma, 5°H.Giovanni Pluma0% (1)
- Ed Exactas y Reducibles A ExactasDocumento15 pagineEd Exactas y Reducibles A ExactasKEVIN JAIR CORREA PALOMINONessuna valutazione finora
- Tipos de PendulosDocumento6 pagineTipos de PendulosZevach Erick Chávez UrbanoNessuna valutazione finora
- UNIDAD No 2 Parte 2Documento8 pagineUNIDAD No 2 Parte 2GUZMAN PAREDES JEAN PIERRENessuna valutazione finora
- Problemario de Calculo Unida2Documento15 pagineProblemario de Calculo Unida2Miriam AquinoNessuna valutazione finora
- Mat Avanz - Archivo2Documento6 pagineMat Avanz - Archivo2Jorge EspinoNessuna valutazione finora
- Evalúe La Función en Los Valores IndicadosDocumento3 pagineEvalúe La Función en Los Valores IndicadosMauricio VergaraNessuna valutazione finora
- Trabajo Medina Hermosilla EstibenDanielDocumento20 pagineTrabajo Medina Hermosilla EstibenDanielEstiben Daniel MedinaNessuna valutazione finora
- Taller 2Documento29 pagineTaller 2Jenny Gomez ViviescasNessuna valutazione finora
- ADA 2 - MejíaZapataFranciscoDocumento6 pagineADA 2 - MejíaZapataFranciscoMatazoTacazoNessuna valutazione finora
- Exámen CorregidoDocumento5 pagineExámen CorregidoFernando AndresNessuna valutazione finora
- Sesiones 19 y 20:: Análisis Vectorial y Tensorial Aplicado A La FísicaDocumento22 pagineSesiones 19 y 20:: Análisis Vectorial y Tensorial Aplicado A La FísicamemessNessuna valutazione finora
- Tarea#3 II CICLODocumento5 pagineTarea#3 II CICLOmarlon aquinoNessuna valutazione finora
- Elementos de Inferencia EstadisticaDocumento21 pagineElementos de Inferencia EstadisticajhonxjoelNessuna valutazione finora
- Unidad 1-Números RealesDocumento23 pagineUnidad 1-Números RealesSilvana CevallosNessuna valutazione finora
- Problemario de Tercer AñoDocumento19 pagineProblemario de Tercer AñoMatematicasPachucaNessuna valutazione finora
- Concurso de Competencias 2023 Ies 32 MHC - OficialDocumento28 pagineConcurso de Competencias 2023 Ies 32 MHC - Oficialjbcruzf2Nessuna valutazione finora
- Práctica Conceptual 5Documento2 paginePráctica Conceptual 5Javier AbadNessuna valutazione finora
- Manual de Asignaturama C Basicas - Probabilidad y EstadisticaDocumento37 pagineManual de Asignaturama C Basicas - Probabilidad y EstadisticaAnonymous BYtN6oGNessuna valutazione finora
- Ejercicios Continuidad y LimitesDocumento2 pagineEjercicios Continuidad y LimitesKelvin Parco FelicesNessuna valutazione finora
- Evaluacion de Practica Contiene Ejercicios Muy InteresantesDocumento4 pagineEvaluacion de Practica Contiene Ejercicios Muy InteresantesgabtpiNessuna valutazione finora
- Ejemplo 4Documento23 pagineEjemplo 4Abigail Santos PinedaNessuna valutazione finora
- Ejemplo RupDocumento26 pagineEjemplo RupJulio NuevoNessuna valutazione finora
- P 3. Guía Práctica BoucherieDocumento4 pagineP 3. Guía Práctica BoucherieOmar Ruben Mealla MontellanoNessuna valutazione finora
- Exposición MaquetaDocumento2 pagineExposición MaquetaSONIA MARIA PRADA AMANDINessuna valutazione finora
- Triptico Algebbra LinealDocumento2 pagineTriptico Algebbra LinealjackNessuna valutazione finora
- Dinamica de Una ParticulaDocumento38 pagineDinamica de Una Particulapedro100% (1)
- Compresores y MotoresDocumento2 pagineCompresores y MotoresAlejandro CuellarNessuna valutazione finora
- Taller El Método CientíficoDocumento6 pagineTaller El Método CientíficoalvaroNessuna valutazione finora
- METODOLOGIADocumento59 pagineMETODOLOGIAAprendiz Elyon YirehNessuna valutazione finora
- LTP Tema1 15 16Documento93 pagineLTP Tema1 15 16Xema Calabozo AlmuñecarNessuna valutazione finora
- LayoutDocumento1 paginaLayoutMayra Ruiz GarcilazoNessuna valutazione finora
- Plan de Minado (Estabilidad de Taludes) - MinesigthDocumento119 paginePlan de Minado (Estabilidad de Taludes) - MinesigthHéctor Henry Ramirez RosalesNessuna valutazione finora
- Semana 7 Clase 2 Mat - P2Q2Documento6 pagineSemana 7 Clase 2 Mat - P2Q2Juan Antonio GómezNessuna valutazione finora
- Marco Teórico de Gestión Por ProcesosDocumento13 pagineMarco Teórico de Gestión Por Procesosmauryca2003Nessuna valutazione finora
- Matematica2 Semana 11 - Dia 4 Solucion Matematica Ccesa007Documento17 pagineMatematica2 Semana 11 - Dia 4 Solucion Matematica Ccesa007Demetrio Ccesa RaymeNessuna valutazione finora
- 11.6.6 Lab - Calculate IPv4 SubnetsDocumento4 pagine11.6.6 Lab - Calculate IPv4 SubnetsLILIANA GUTIERREZ RANCRUELNessuna valutazione finora
- Orffe Fasol - Canto y Flauta 24 JunioDocumento90 pagineOrffe Fasol - Canto y Flauta 24 JunioMiguel RodriguezNessuna valutazione finora
- Brochure Curso Autocad Civil 3d 2014Documento3 pagineBrochure Curso Autocad Civil 3d 2014skullkNessuna valutazione finora
- Silabo Valle Metodos Numericos ComputacionalesDocumento7 pagineSilabo Valle Metodos Numericos ComputacionalesEstudiante INGNessuna valutazione finora
- 2º Guia Ejercicio MatematicaDocumento210 pagine2º Guia Ejercicio Matematicaerova44771093% (14)
- MANUAL - NOP - Problemas Con Fracciones y Porcentajes - 2022.4Documento5 pagineMANUAL - NOP - Problemas Con Fracciones y Porcentajes - 2022.4Jaren YsidroNessuna valutazione finora