Potrebbero piacerti anche
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
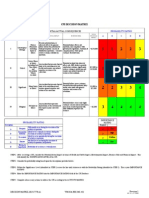
- Decision MatrixDocumento12 pagineDecision Matrixrdos14Nessuna valutazione finora
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Neptune Sign House AspectDocumento80 pagineNeptune Sign House Aspectmesagirl94% (53)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Geo Lab Report Point LoadDocumento9 pagineGeo Lab Report Point Loaddrbrainsol50% (2)
- Refrigeration and Air ConditioningDocumento263 pagineRefrigeration and Air ConditioningAjeet Verma92% (12)
- Mechanical Failure of Materials 9789814560375-c2Documento23 pagineMechanical Failure of Materials 9789814560375-c2Recep Vatansever0% (1)
- Recording and reporting in hospitals and nursing collegesDocumento48 pagineRecording and reporting in hospitals and nursing collegesRaja100% (2)
- Introduction to Corporate Communication ObjectivesDocumento26 pagineIntroduction to Corporate Communication ObjectivesKali MuthuNessuna valutazione finora
- PLC 2 Ladder DiagramDocumento53 paginePLC 2 Ladder DiagramAnkur GuptaNessuna valutazione finora
- Career DevelopmentDocumento23 pagineCareer DevelopmentHaris Khan100% (1)
- Automobilechassisandbody 160622030425Documento95 pagineAutomobilechassisandbody 160622030425Thomas TamangNessuna valutazione finora
- Natural ConvectionDocumento7 pagineNatural ConvectionPeterNessuna valutazione finora
- Design & Development of Rice Planter Machine: Dhanesh D. Patil & Dr. Mangesh R. PhateDocumento6 pagineDesign & Development of Rice Planter Machine: Dhanesh D. Patil & Dr. Mangesh R. PhateThomas TamangNessuna valutazione finora
- Publishing Arrangements For International Heat Treatment and Surface EngineeringDocumento2 paginePublishing Arrangements For International Heat Treatment and Surface EngineeringThomas TamangNessuna valutazione finora
- DFMEA of A Bicycle: Sno. Item / Function Requirements Potential Failure Mode Potential Effect of FailureDocumento8 pagineDFMEA of A Bicycle: Sno. Item / Function Requirements Potential Failure Mode Potential Effect of FailureThomas TamangNessuna valutazione finora
- Controlling of Pneumatic CylindersDocumento3 pagineControlling of Pneumatic Cylindersاحمد السيدNessuna valutazione finora
- Electric simulation of mechanical oscillations Lab 1Documento5 pagineElectric simulation of mechanical oscillations Lab 1Thomas TamangNessuna valutazione finora
- Football ThrowingDocumento14 pagineFootball ThrowingThomas TamangNessuna valutazione finora
- Bottom-MDF-Side-Support X 2 (406X 23mm)Documento1 paginaBottom-MDF-Side-Support X 2 (406X 23mm)Thomas TamangNessuna valutazione finora
- 174-Article Text-315-1-10-20180122Documento6 pagine174-Article Text-315-1-10-20180122Thomas TamangNessuna valutazione finora
- Executive Summary: Stephanie Ulman Stephanie Ulman Hyatt Assignment 9/10/12 0610 403-02 Failure of Mechanics 1Documento16 pagineExecutive Summary: Stephanie Ulman Stephanie Ulman Hyatt Assignment 9/10/12 0610 403-02 Failure of Mechanics 1Thomas TamangNessuna valutazione finora
- 1740 - 9 NasaDocumento113 pagine1740 - 9 NasaEngr Fawad WaliNessuna valutazione finora
- 02 Wheelset (BW)Documento30 pagine02 Wheelset (BW)Thomas TamangNessuna valutazione finora
- Basics of Heat-Exchangers Design by N. SinagaDocumento81 pagineBasics of Heat-Exchangers Design by N. SinagaThomas TamangNessuna valutazione finora
- 1 Mathcad - Given-Find-Truss-Method I PDFDocumento1 pagina1 Mathcad - Given-Find-Truss-Method I PDFThomas TamangNessuna valutazione finora
- RTU Riga HomeWorks Transmission Rotational MotionDocumento4 pagineRTU Riga HomeWorks Transmission Rotational MotionThomas TamangNessuna valutazione finora
- 1 Mathcad Given Find Truss Method IDocumento1 pagina1 Mathcad Given Find Truss Method IThomas TamangNessuna valutazione finora
- Mosek UserguideDocumento81 pagineMosek UserguideadethroNessuna valutazione finora
- Windows Server 2016 Editions ComparisonDocumento4 pagineWindows Server 2016 Editions ComparisonmasterredhardNessuna valutazione finora
- Roland Barthes and Struggle With AngelDocumento8 pagineRoland Barthes and Struggle With AngelAbdullah Bektas0% (1)
- CH13 QuestionsDocumento4 pagineCH13 QuestionsAngel Itachi MinjarezNessuna valutazione finora
- حقيبة تعليمية لمادة التحليلات الهندسية والعدديةDocumento28 pagineحقيبة تعليمية لمادة التحليلات الهندسية والعدديةAnjam RasulNessuna valutazione finora
- Significance of Vaiseshika's PragabhavaDocumento5 pagineSignificance of Vaiseshika's Pragabhavavskanchi0% (1)
- Corporate Strategic Planning AssignmentDocumento10 pagineCorporate Strategic Planning AssignmentSumit DuttaNessuna valutazione finora
- Fiber Optic Communication PDFDocumento2 pagineFiber Optic Communication PDFluisperikoNessuna valutazione finora
- Procedural Text Unit Plan OverviewDocumento3 pagineProcedural Text Unit Plan Overviewapi-361274406Nessuna valutazione finora
- Group 7 Scope StatementDocumento17 pagineGroup 7 Scope Statementapi-335995226100% (4)
- Signal Processing Problems Chapter 12Documento20 pagineSignal Processing Problems Chapter 12CNessuna valutazione finora
- Grammar Booster: Lesson 1Documento1 paginaGrammar Booster: Lesson 1Diana Carolina Figueroa MendezNessuna valutazione finora
- Cellulose StructureDocumento9 pagineCellulose Structuremanoj_rkl_07Nessuna valutazione finora
- How To Prepare Squash Specimen Samples For Microscopic ObservationDocumento3 pagineHow To Prepare Squash Specimen Samples For Microscopic ObservationSAMMYNessuna valutazione finora
- Cost of Litigation Report (2015)Documento17 pagineCost of Litigation Report (2015)GlennKesslerWPNessuna valutazione finora
- Tabelas Normativas DinDocumento2 pagineTabelas Normativas DinDeimos PhobosNessuna valutazione finora
- What Is Architecture?Documento17 pagineWhat Is Architecture?Asad Zafar HaiderNessuna valutazione finora
- 1 PDFDocumento14 pagine1 PDFPM JFNessuna valutazione finora
- Studies On Diffusion Approach of MN Ions Onto Granular Activated CarbonDocumento7 pagineStudies On Diffusion Approach of MN Ions Onto Granular Activated CarbonInternational Journal of Application or Innovation in Engineering & ManagementNessuna valutazione finora
- Digital Logic Design: Dr. Oliver FaustDocumento16 pagineDigital Logic Design: Dr. Oliver FaustAtifMinhasNessuna valutazione finora
- NAVMC 3500.35A (Food Services)Documento88 pagineNAVMC 3500.35A (Food Services)Alexander HawkNessuna valutazione finora
- Lesson Rubric Team Group (Lesson Plan 1)Documento2 pagineLesson Rubric Team Group (Lesson Plan 1)Yodalis VazquezNessuna valutazione finora
- Two Monuments by C Mann 1493 Copy - PDF - OcredDocumento23 pagineTwo Monuments by C Mann 1493 Copy - PDF - OcredStephania FrancoNessuna valutazione finora