Potrebbero piacerti anche
- Tareas de Módulo Inst. y Acop. de TransformadoresDocumento8 pagineTareas de Módulo Inst. y Acop. de TransformadoresJose Americo SanchezNessuna valutazione finora
- Fasores de Multiplicacion y Divicion PDFDocumento3 pagineFasores de Multiplicacion y Divicion PDFDayana100% (1)
- Clase 67 Traf Ofir MeDocumento59 pagineClase 67 Traf Ofir MeMiguel Angel Cuadros QuispeNessuna valutazione finora
- Lab02 Rectificador de Onda Completa C23 v3 2021Documento15 pagineLab02 Rectificador de Onda Completa C23 v3 202113333323DDDNessuna valutazione finora
- SCR y GtoDocumento13 pagineSCR y GtoAbrahan Panuera CCasani0% (1)
- Control Units CU250S-2 Es-ESDocumento46 pagineControl Units CU250S-2 Es-ESkinzazaNessuna valutazione finora
- Ejercicios PLC HNLDocumento155 pagineEjercicios PLC HNLSteven SilverioNessuna valutazione finora
- El Transformador Monofásico (Prueba de Vacío)Documento14 pagineEl Transformador Monofásico (Prueba de Vacío)Andrea Chavez CossioNessuna valutazione finora
- 00666520074IE10S11040086Semana 06 T Automatizacion IndustrialDocumento12 pagine00666520074IE10S11040086Semana 06 T Automatizacion IndustrialNancy RojasNessuna valutazione finora
- Cuaderno de Informe de Seminario 3ra SemanaDocumento15 pagineCuaderno de Informe de Seminario 3ra SemanaYeicob rodriguezNessuna valutazione finora
- Capitulo 4 - Elementos de MemoriaDocumento18 pagineCapitulo 4 - Elementos de MemoriaTurbo59Nessuna valutazione finora
- CLASE 8 TrafofirmeDocumento32 pagineCLASE 8 TrafofirmeWilliam rafael Membrillo cerdanNessuna valutazione finora
- Motor Arranque Con CapacitorDocumento25 pagineMotor Arranque Con CapacitorCharlie Os Pl100% (1)
- EEID-513 - CUADERNO DE INFORMES Seminario ROGGER OIivaresDocumento19 pagineEEID-513 - CUADERNO DE INFORMES Seminario ROGGER OIivaresArthur Yosimar EspinozaNessuna valutazione finora
- Rectificación de Media Onda No Controlada Con Carga ResistivaDocumento8 pagineRectificación de Media Onda No Controlada Con Carga ResistivaYeser HidalgoNessuna valutazione finora
- CV Fernando Sanchez EcharatiDocumento5 pagineCV Fernando Sanchez EcharatiRoberth Junior Luque GironNessuna valutazione finora
- Caracteristicas de Las BobinasDocumento16 pagineCaracteristicas de Las BobinasHenry Vaupes Varela Mejia0% (1)
- Informe FinalDocumento7 pagineInforme FinalObinumliNessuna valutazione finora
- Conexion de Sensores IndustrialesDocumento14 pagineConexion de Sensores IndustrialesJesus MedranoNessuna valutazione finora
- Informe Rectificación Controlada TrifásicaDocumento8 pagineInforme Rectificación Controlada TrifásicaNicolasNessuna valutazione finora
- Peña Vargas Elissa, CORRECCION de Conversion de Señal Analogica DigitalDocumento13 paginePeña Vargas Elissa, CORRECCION de Conversion de Señal Analogica DigitalJulian PeñaNessuna valutazione finora
- Ana - Central Hidro Niko AlarconDocumento28 pagineAna - Central Hidro Niko AlarconCesar AraucoNessuna valutazione finora
- Tema TransformadoresDocumento28 pagineTema TransformadoresEduardo Rodriguez100% (1)
- 100000i36n-Guia N°2-Labmaqui01-Regulación y Eficiencia Del TransformadorDocumento13 pagine100000i36n-Guia N°2-Labmaqui01-Regulación y Eficiencia Del TransformadorJoséPérezCamposNessuna valutazione finora
- Lab 2Documento32 pagineLab 2Julio Cesar100% (1)
- Labo 4 Medidas 1Documento12 pagineLabo 4 Medidas 14Nessuna valutazione finora
- Pregunta 1 TecsupDocumento6 paginePregunta 1 TecsupJeanpierre Apolinario Tito0% (1)
- Practica 03 TPDocumento15 paginePractica 03 TPCarlos Sucasaire Chura100% (1)
- Cuaderno de Informe 1Documento15 pagineCuaderno de Informe 1jeffersonNessuna valutazione finora
- Control Fotoelectrico (Luz Automatica)Documento1 paginaControl Fotoelectrico (Luz Automatica)Pedro SánchezNessuna valutazione finora
- La Instruccion Marca: Mandos Por Controladores Logicos Programables IDocumento26 pagineLa Instruccion Marca: Mandos Por Controladores Logicos Programables ICesar Augusto Rodriguez FigueroaNessuna valutazione finora
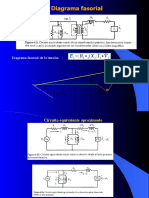
- Diagrama Fasorial de La TensiónDocumento11 pagineDiagrama Fasorial de La TensiónFelix Alexander VargasNessuna valutazione finora
- Final Puican 2Documento28 pagineFinal Puican 2Franco Gustavo JHNessuna valutazione finora
- ASP - Pdfs SusanibarDocumento72 pagineASP - Pdfs SusanibarMARCAVILLACA CONDORI ANTONY CLEMENTNessuna valutazione finora
- Clase 4 TiristoresDocumento46 pagineClase 4 TiristoresJhonatan Infante0% (1)
- ContactorDocumento37 pagineContactorYasmely Chipa CarrascoNessuna valutazione finora
- 6.0-Maquinas de Corriente DirectaDocumento8 pagine6.0-Maquinas de Corriente Directacristhian cabreraNessuna valutazione finora
- Ecid Ii S5Documento130 pagineEcid Ii S5Jose FernandezNessuna valutazione finora
- CAP6 ElectroneumaticaDocumento24 pagineCAP6 ElectroneumaticaarnesimoNessuna valutazione finora
- Escuela Mecatronica Malla CurricularDocumento1 paginaEscuela Mecatronica Malla CurricularArmando YPNessuna valutazione finora
- Motor Trifasico de InduccionDocumento3 pagineMotor Trifasico de InduccionLeticia Karina Garcia MezaNessuna valutazione finora
- Pendulo InvertidoDocumento3 paginePendulo InvertidoHasber MalpicaNessuna valutazione finora
- Actuadores 1Documento41 pagineActuadores 1Luis Lopez ReynaNessuna valutazione finora
- Variables Vijeo Designer 5Documento3 pagineVariables Vijeo Designer 5Ancizar AlzateNessuna valutazione finora
- Semana 1 Eeid 601 Prof Poma Vi EeidDocumento40 pagineSemana 1 Eeid 601 Prof Poma Vi EeidConquistandoteRomexsNessuna valutazione finora
- Registro de Desplazamiento ManyDocumento10 pagineRegistro de Desplazamiento Manylus maria ruiz chuquirunaNessuna valutazione finora
- Diodos Y Transistores.: Unidad Temas SubtemasDocumento39 pagineDiodos Y Transistores.: Unidad Temas Subtemasllamas_339312Nessuna valutazione finora
- Generador CCDocumento13 pagineGenerador CCNick Miranda LozanoNessuna valutazione finora
- GUIA 2. Amplificador Inversor y No InversorDocumento6 pagineGUIA 2. Amplificador Inversor y No InversorAyde Yadira Cuaran CuaranNessuna valutazione finora
- SPA - Ver Openlab PDFDocumento46 pagineSPA - Ver Openlab PDFFrancisco HernandezNessuna valutazione finora
- No 02-2 Arranque Directo Con Inversion de Giro Del Motor de Induccion TrifasicoDocumento28 pagineNo 02-2 Arranque Directo Con Inversion de Giro Del Motor de Induccion TrifasicoEduard Nayef Baltazar IbarraNessuna valutazione finora
- Circuitos Secuenciales Asincronos PDFDocumento51 pagineCircuitos Secuenciales Asincronos PDFAlfonso Armando Pérez CerdaNessuna valutazione finora
- Tema IVDocumento51 pagineTema IVLeandro SchenoneNessuna valutazione finora
- Sistemas Secuenciales SincronosDocumento9 pagineSistemas Secuenciales SincronosyosguardNessuna valutazione finora
- Capitulo Vi - Analisis y Sintesis de Circuitos Secuenciales SincronosDocumento72 pagineCapitulo Vi - Analisis y Sintesis de Circuitos Secuenciales Sincronosalex100% (1)
- Diseño de Contadores SincronosDocumento12 pagineDiseño de Contadores Sincronosorlando_heredia7934Nessuna valutazione finora
- Unidad 2 - Circuitos SecuencialesDocumento68 pagineUnidad 2 - Circuitos SecuencialesPedro BerecibarNessuna valutazione finora
- Maquinas de Estado VSR - Parte - 1Documento26 pagineMaquinas de Estado VSR - Parte - 1vickysalazar6165Nessuna valutazione finora
- Tema IVDocumento50 pagineTema IVAndres UmarraNessuna valutazione finora
- Sistemas Secuenciales 1 PDFDocumento86 pagineSistemas Secuenciales 1 PDFJuan Diego Márquez ChávezNessuna valutazione finora
- Laboratorio N 7Documento3 pagineLaboratorio N 7Abigail CoraiteNessuna valutazione finora
- La Redacción de Un Articulo CientificoDocumento13 pagineLa Redacción de Un Articulo CientificoCARLOSNessuna valutazione finora
- Curso Drive Programming Mayo 2011 PDFDocumento56 pagineCurso Drive Programming Mayo 2011 PDFrosy01710100% (1)
- Reconocimiento de PatronesDocumento4 pagineReconocimiento de PatronesAbigail CoraiteNessuna valutazione finora
- Cómo Escribir y Publicar Trabajos CientíficosDocumento270 pagineCómo Escribir y Publicar Trabajos CientíficosEstudiantes por Derecho88% (8)
- Maquinas Sincronas PDFDocumento28 pagineMaquinas Sincronas PDFFercho MbNessuna valutazione finora
- Circuitos Secuenciales Asincronos PDFDocumento51 pagineCircuitos Secuenciales Asincronos PDFAbigail CoraiteNessuna valutazione finora
- Tópicos Sobre FODocumento21 pagineTópicos Sobre FOAbigail CoraiteNessuna valutazione finora
- CifradoDocumento39 pagineCifradoAbigail CoraiteNessuna valutazione finora
- Compresion de DatosDocumento14 pagineCompresion de DatosAngel AlejandroNessuna valutazione finora
- ModulaciónDocumento99 pagineModulaciónAbigail CoraiteNessuna valutazione finora
- Laboratorio 3 Elt2692-2-2013Documento2 pagineLaboratorio 3 Elt2692-2-2013Abigail CoraiteNessuna valutazione finora
- Informe 8Documento17 pagineInforme 8Abigail CoraiteNessuna valutazione finora
- CifradoDocumento39 pagineCifradoAbigail CoraiteNessuna valutazione finora
- Capitulo 2 PDFDocumento19 pagineCapitulo 2 PDFAbigail CoraiteNessuna valutazione finora
- 4-Materiales MagneticosDocumento46 pagine4-Materiales MagneticosginastereoNessuna valutazione finora
- HP 49G Manual de Usuario (Español)Documento185 pagineHP 49G Manual de Usuario (Español)Josué Alvarado50% (2)
- Campo MagneticoDocumento5 pagineCampo MagneticoAbigail CoraiteNessuna valutazione finora
- Cuadriláteros Circunferencia PirmeroDocumento7 pagineCuadriláteros Circunferencia PirmeroAndreaNessuna valutazione finora
- EP10 GabaritoDocumento3 pagineEP10 GabaritoLeo WolfNessuna valutazione finora
- Electricidad BasicaDocumento16 pagineElectricidad BasicaJuan MoralesNessuna valutazione finora
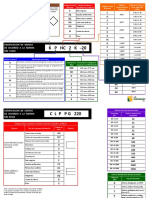
- Codigo Lubricantes DINDocumento2 pagineCodigo Lubricantes DINJose Farro100% (2)
- Producción de Energía A Partir de Celdas de HidrogenoDocumento38 pagineProducción de Energía A Partir de Celdas de HidrogenoAldo Celaya TonchezNessuna valutazione finora
- Tarea Final Calculo DiferencialDocumento30 pagineTarea Final Calculo DiferencialYer Paniora GarciaNessuna valutazione finora
- Recalces Y Refuerzos en Las Cimentaciones: Capitulo VDocumento20 pagineRecalces Y Refuerzos en Las Cimentaciones: Capitulo VJimenez PJNessuna valutazione finora
- Tesis Perturbaciones BasicoDocumento103 pagineTesis Perturbaciones BasicohergiofuenmayorNessuna valutazione finora
- L10 Zapata MedianeriaDocumento32 pagineL10 Zapata Medianeriaweber21Nessuna valutazione finora
- Sesion 04 OctubreDocumento34 pagineSesion 04 OctubreGladys Pastor RodríguezNessuna valutazione finora
- Amef CalderaDocumento7 pagineAmef CalderaKevin FloresNessuna valutazione finora
- Línea Del TiempoDocumento3 pagineLínea Del TiempoNeirovis TejadaNessuna valutazione finora
- La Importancia de La Exergia en La Ingenieria ActualDocumento2 pagineLa Importancia de La Exergia en La Ingenieria ActualLeonardoNessuna valutazione finora
- Presentacion MetroEthernet y EFMDocumento11 paginePresentacion MetroEthernet y EFMJosely MontillaNessuna valutazione finora
- Entregable 4 - Aprendizaje SupervisadoDocumento7 pagineEntregable 4 - Aprendizaje SupervisadoSantiago Suárez lagosNessuna valutazione finora
- "En Una Pista Circular de Juguete Hay Cuatro - Todos Los "Documento3 pagine"En Una Pista Circular de Juguete Hay Cuatro - Todos Los "Carlo antonio Florian0% (1)
- Revit Clase 1 24.02.20Documento19 pagineRevit Clase 1 24.02.20Jose Carlos0% (2)
- Ejercicios Resueltos de Teoria de Conjuntos Pagina EducativaDocumento3 pagineEjercicios Resueltos de Teoria de Conjuntos Pagina EducativaWENDY ANGELA MALLQUI BUSTAMANTENessuna valutazione finora
- Trabajo de Estadistica Ii E1 Resuelto NuevoDocumento6 pagineTrabajo de Estadistica Ii E1 Resuelto NuevoAuxiliar SSTNessuna valutazione finora
- Práctica No. 1 Aplicación de Los Conceptos Básicos de CinemáticaDocumento3 paginePráctica No. 1 Aplicación de Los Conceptos Básicos de CinemáticaBryxton81st BryxtonNessuna valutazione finora
- Clase 1 ConceptosDocumento47 pagineClase 1 ConceptosAna Pérez GiráldezNessuna valutazione finora
- Diagnostico Del PulsoDocumento24 pagineDiagnostico Del PulsoHakan GüreNessuna valutazione finora
- Practica - No1 - AFINS - Sergio Andres Pardo PDFDocumento11 paginePractica - No1 - AFINS - Sergio Andres Pardo PDFSergio P. SuárezNessuna valutazione finora
- Practica 2 ParcialDocumento8 paginePractica 2 Parcialjulio floresNessuna valutazione finora
- SD Hoja Guia 5 2020A PDFDocumento2 pagineSD Hoja Guia 5 2020A PDFCris 97Nessuna valutazione finora
- E JERCI1Documento4 pagineE JERCI1MAGUIÑA CASTRO LUIS ALEXANDERNessuna valutazione finora
- TALLER 2 HidrologiaDocumento13 pagineTALLER 2 Hidrologiafernando100% (1)
- SisautevaDocumento8 pagineSisautevaJota E CeballosNessuna valutazione finora
- Clonezilla - Manual de Uso BasicoDocumento9 pagineClonezilla - Manual de Uso BasicoErick Acevedo100% (1)
- TP 10 - Problemas Integrados - Clase 04-11-2021Documento12 pagineTP 10 - Problemas Integrados - Clase 04-11-2021Rocio ArigosNessuna valutazione finora