Potrebbero piacerti anche
- Load Flow StudiesDocumento30 pagineLoad Flow StudiesMary Morse100% (2)
- Input Filter Design For SMPSDocumento21 pagineInput Filter Design For SMPSsenkum812002Nessuna valutazione finora
- Model 50 Operation ManualDocumento41 pagineModel 50 Operation ManualSergio Sacht100% (2)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDa EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNessuna valutazione finora
- (Scilab Textbook) Electric Power Distribution System Engineering - T. GonenDocumento147 pagine(Scilab Textbook) Electric Power Distribution System Engineering - T. GonenLuis CamargoNessuna valutazione finora
- Electrical Q&A Part-3Documento18 pagineElectrical Q&A Part-3supermannon100% (1)
- Synchronous MachineDocumento33 pagineSynchronous Machinecrisis_z100% (1)
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsDa EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNessuna valutazione finora
- Determination of Power System Voltage Stability Using Modal AnalysisDocumento7 pagineDetermination of Power System Voltage Stability Using Modal Analysiswvargas926Nessuna valutazione finora
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDa EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetValutazione: 2 su 5 stelle2/5 (1)
- Review of Reactive Power Compensation TechnologiesDocumento79 pagineReview of Reactive Power Compensation TechnologiesRadu BabauNessuna valutazione finora
- Ad 03401640171Documento8 pagineAd 03401640171International Journal of computational Engineering research (IJCER)Nessuna valutazione finora
- Optimal Placement and Sizing of Static Var Compensators in Power Systems Using Improved Harmony Search AlgorithmDocumento5 pagineOptimal Placement and Sizing of Static Var Compensators in Power Systems Using Improved Harmony Search AlgorithmcuamiNessuna valutazione finora
- Loss ReductionDocumento35 pagineLoss Reductionsolomon nchor akansakeNessuna valutazione finora
- Voltage Stability Analysis BY Simulated Annealing AlgorithmDocumento7 pagineVoltage Stability Analysis BY Simulated Annealing AlgorithmInternational Journal of Engineering and TechniquesNessuna valutazione finora
- Optimal Allocation of Shunt Var CompensaDocumento11 pagineOptimal Allocation of Shunt Var CompensaDa VidNessuna valutazione finora
- UPFC ModelDocumento6 pagineUPFC ModelArjun -Nessuna valutazione finora
- Global Voltage Stability Analysis of A Power System Using Network Equivalencing Technique in The Presence of TCSCDocumento18 pagineGlobal Voltage Stability Analysis of A Power System Using Network Equivalencing Technique in The Presence of TCSCblaagicaNessuna valutazione finora
- Maindocument-1 (23M-03-072) - Original - 0 Extendid-ICT PEP PLN 2022 - Bus Voltage Control FinalDocumento6 pagineMaindocument-1 (23M-03-072) - Original - 0 Extendid-ICT PEP PLN 2022 - Bus Voltage Control FinalM UMAR ABBASINessuna valutazione finora
- A Novel Approach To Optimal Allocation of SVC Using Genetic Algorithms and Continuation Power FlowDocumento5 pagineA Novel Approach To Optimal Allocation of SVC Using Genetic Algorithms and Continuation Power FlowMadalena TrindadeNessuna valutazione finora
- Reactive Power Compensation Technologies, State-of-the-Art ReviewDocumento21 pagineReactive Power Compensation Technologies, State-of-the-Art ReviewsharptrNessuna valutazione finora
- Determination of Optimal Location of Upfc Controller Devices in Electric Transmission System by Using Pso MethodDocumento8 pagineDetermination of Optimal Location of Upfc Controller Devices in Electric Transmission System by Using Pso MethodIOSRjournalNessuna valutazione finora
- Contingency Evaluation For Voltage Security Assessment of Power SystemsDocumento4 pagineContingency Evaluation For Voltage Security Assessment of Power Systemssmriti_hunny5969Nessuna valutazione finora
- A Fast Continuation Load Flow AnalysisDocumento11 pagineA Fast Continuation Load Flow Analysisqbjohnnydp0% (1)
- Model Predictive Control-Based Real-Time Power System Protection SchemesDocumento11 pagineModel Predictive Control-Based Real-Time Power System Protection Schemesjinlei chenNessuna valutazione finora
- VAR Management and FACTS Controllers Improve Loadability of IEEE 30 Bus SystemDocumento4 pagineVAR Management and FACTS Controllers Improve Loadability of IEEE 30 Bus SystemEdu FzNessuna valutazione finora
- A Voltage Stability Index For Radial Distribution Networks: U. Eminoglu M. H. HocaogluDocumento6 pagineA Voltage Stability Index For Radial Distribution Networks: U. Eminoglu M. H. HocaogluAkhilesh BarnwalNessuna valutazione finora
- Istanbul Meta 24Documento6 pagineIstanbul Meta 24aliNessuna valutazione finora
- Load Flow Analysis of Transmission Network With Series CompensationDocumento5 pagineLoad Flow Analysis of Transmission Network With Series CompensationInternational Journal of Research in Engineering and TechnologyNessuna valutazione finora
- Location of Facts DevicesDocumento8 pagineLocation of Facts DevicesДејан ПејовскиNessuna valutazione finora
- Voltage Control in Deregulated Power SystemsDocumento15 pagineVoltage Control in Deregulated Power SystemsAshok PalakondaNessuna valutazione finora
- Generator Dispatch by Sensitivity MethodDocumento7 pagineGenerator Dispatch by Sensitivity MethodHans John DcruzNessuna valutazione finora
- Olving The Capacitor Placement Problem in A Radial Distribution System Using Tabu Search ApproachDocumento6 pagineOlving The Capacitor Placement Problem in A Radial Distribution System Using Tabu Search ApproachJorge CarrionNessuna valutazione finora
- Reactive Power Control Using New Grey Wolf Optimizer Algorithm To Minimize Power System LossDocumento9 pagineReactive Power Control Using New Grey Wolf Optimizer Algorithm To Minimize Power System LossZellagui EnergyNessuna valutazione finora
- Reactive Power Compensation Technologies: State-of-the-Art ReviewDocumento21 pagineReactive Power Compensation Technologies: State-of-the-Art ReviewPaola Lorena Ruge GarciaNessuna valutazione finora
- Optimal Sizing of Capacitors Placed On A Radial Distribution SystemDocumento9 pagineOptimal Sizing of Capacitors Placed On A Radial Distribution SystemghotourNessuna valutazione finora
- Evaluation of IEEE 57 Bus System For Optimal Power Flow AnalysisDocumento5 pagineEvaluation of IEEE 57 Bus System For Optimal Power Flow AnalysisAnkur MaheshwariNessuna valutazione finora
- Progress Report of Minor ProjectDocumento32 pagineProgress Report of Minor ProjectVaibhav DahiyaNessuna valutazione finora
- Reactive Power Compensation Technologies PDFDocumento21 pagineReactive Power Compensation Technologies PDFTovar ArmandoNessuna valutazione finora
- Voltage Collapse PredictionDocumento8 pagineVoltage Collapse PredictionLaura CrawfordNessuna valutazione finora
- A Procedure To Specify The Weighting Matrices For An Optimal Load-Frequency ControllerDocumento13 pagineA Procedure To Specify The Weighting Matrices For An Optimal Load-Frequency ControllerSai SivaNessuna valutazione finora
- Optimal Allocation of Capacitors in Radial Distribution Systems With Distributed GenerationDocumento6 pagineOptimal Allocation of Capacitors in Radial Distribution Systems With Distributed GenerationJaviForeroNessuna valutazione finora
- Algorithm Allocation: System Security Improvement Differential EvolutionDocumento6 pagineAlgorithm Allocation: System Security Improvement Differential EvolutionPiyush AgnihotriNessuna valutazione finora
- Reducing Distribution Losses Using Distributed End-User Reactive Power SupportDocumento6 pagineReducing Distribution Losses Using Distributed End-User Reactive Power SupportKrishanSinghNessuna valutazione finora
- Af3526312639 PDFDocumento9 pagineAf3526312639 PDFGonzalo GomezNessuna valutazione finora
- Use of PQV Surface As A Tool For Comparing The Effects of FACTS Devices On Static Voltage StabilityDocumento9 pagineUse of PQV Surface As A Tool For Comparing The Effects of FACTS Devices On Static Voltage StabilityaliNessuna valutazione finora
- So - Ha73@stu-Mail - Um.ac - Ir: Corresponding Author Tel-Fax: +98-511-8763302. (S. Hasanpour)Documento22 pagineSo - Ha73@stu-Mail - Um.ac - Ir: Corresponding Author Tel-Fax: +98-511-8763302. (S. Hasanpour)Alesso RossiNessuna valutazione finora
- So - Ha73@stu-Mail - Um.ac - Ir: Corresponding Author Tel-Fax: +98-511-8763302. (S. Hasanpour)Documento22 pagineSo - Ha73@stu-Mail - Um.ac - Ir: Corresponding Author Tel-Fax: +98-511-8763302. (S. Hasanpour)Alesso RossiNessuna valutazione finora
- Statistical Method For Identification of Weak Nodes in Power System Based On Voltage Magnitude DeviationDocumento8 pagineStatistical Method For Identification of Weak Nodes in Power System Based On Voltage Magnitude DeviationHarika HarikaNessuna valutazione finora
- Iosr JeeeDocumento12 pagineIosr JeeekiranNessuna valutazione finora
- Fast Decoupled Power Flow Unbalanced Radial Distribution SystemsDocumento8 pagineFast Decoupled Power Flow Unbalanced Radial Distribution SystemsAbdulrahmanNessuna valutazione finora
- A Case Study of Load Flow and Optimal Load Flow Analysis On 400 KV Sub-Station SojaDocumento5 pagineA Case Study of Load Flow and Optimal Load Flow Analysis On 400 KV Sub-Station SojaJoe RanteNessuna valutazione finora
- A Project Report On "Modelling of Fact Device For Power Flow Analysis"Documento45 pagineA Project Report On "Modelling of Fact Device For Power Flow Analysis"gopalchandramahatoNessuna valutazione finora
- STATCOM Study For 132 KV NAGPUR RING MAINDocumento6 pagineSTATCOM Study For 132 KV NAGPUR RING MAINSaikrishnaNessuna valutazione finora
- Upfc PDFDocumento5 pagineUpfc PDFHarish KumarNessuna valutazione finora
- Loss Optimization For Voltage Stability Enhancement Incorporating UPFC Using Particle Swarm OptimizationDocumento7 pagineLoss Optimization For Voltage Stability Enhancement Incorporating UPFC Using Particle Swarm OptimizationSrivaishnavi KalahasthiNessuna valutazione finora
- A Novel Load Sharing Control Technique For Paralleled InvertersDocumento6 pagineA Novel Load Sharing Control Technique For Paralleled InvertersMohamed BerririNessuna valutazione finora
- Power Systems PROJECTS WITH ABSTRACTDocumento5 paginePower Systems PROJECTS WITH ABSTRACTElangovan SekarNessuna valutazione finora
- Improving Power Transfer Capability with Series Capacitor CompensationDocumento6 pagineImproving Power Transfer Capability with Series Capacitor CompensationbashiNessuna valutazione finora
- Review Paper On Optimal Capacitor PlacemDocumento4 pagineReview Paper On Optimal Capacitor PlacemArnold SNessuna valutazione finora
- Performance Analysis of Some FACTS Devices Using Newton Raphson Load Flow AlgorithmDocumento6 paginePerformance Analysis of Some FACTS Devices Using Newton Raphson Load Flow AlgorithmXahid YousafNessuna valutazione finora
- Simulation of D-Q Control System For A Unified Power Flow ControllerDocumento10 pagineSimulation of D-Q Control System For A Unified Power Flow ControllerSyed Faizan AliNessuna valutazione finora
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorDa EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNessuna valutazione finora
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetDa EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNessuna valutazione finora
- Computer Methods in Power Systems Analysis with MATLABDa EverandComputer Methods in Power Systems Analysis with MATLABNessuna valutazione finora
- Implementation of Three Phase Ups System Using SPWM and Fuzzy Logic Controllers For Linear and Non-Linear LoadsDocumento16 pagineImplementation of Three Phase Ups System Using SPWM and Fuzzy Logic Controllers For Linear and Non-Linear LoadsTareq AzizNessuna valutazione finora
- 78 81Documento5 pagine78 81Tareq AzizNessuna valutazione finora
- ECCE 2017 Conference to Feature Paper on Rain Attenuation Estimation for Satellite Links in BangladeshDocumento5 pagineECCE 2017 Conference to Feature Paper on Rain Attenuation Estimation for Satellite Links in BangladeshTareq AzizNessuna valutazione finora
- Project UPS - PDF P04234Documento44 pagineProject UPS - PDF P04234Tareq AzizNessuna valutazione finora
- COFDM Technology Overview and Performance ExpectationsDocumento9 pagineCOFDM Technology Overview and Performance ExpectationsTareq AzizNessuna valutazione finora
- White Paper For-UpsDocumento6 pagineWhite Paper For-UpsPrasenjit BarikNessuna valutazione finora
- Operator and Maintenance Manual DC Power Supply SERIES 3300Documento35 pagineOperator and Maintenance Manual DC Power Supply SERIES 3300Tareq AzizNessuna valutazione finora
- OFDM Demystified: A Beginner's GuideDocumento12 pagineOFDM Demystified: A Beginner's GuideTareq AzizNessuna valutazione finora
- Technical Requirements: TR No. 176001-1.1. EDITIONDocumento13 pagineTechnical Requirements: TR No. 176001-1.1. EDITIONTareq AzizNessuna valutazione finora
- Lightning Protection and Filter Design For The Power Supply System of Communications VehicleDocumento6 pagineLightning Protection and Filter Design For The Power Supply System of Communications VehicleTareq AzizNessuna valutazione finora
- Design and Operation Maintenance On DC Power SystemDocumento6 pagineDesign and Operation Maintenance On DC Power Systemamirtha_s2238Nessuna valutazione finora
- Explicación de CofdmDocumento9 pagineExplicación de CofdmGabyTa CepedaNessuna valutazione finora
- ContentDocumento3 pagineContentTareq AzizNessuna valutazione finora
- Rain Attenuation Prediction Model For Satellite Communications Based On The Météo-France Ensemble Prediction System PEARPDocumento15 pagineRain Attenuation Prediction Model For Satellite Communications Based On The Météo-France Ensemble Prediction System PEARPTareq AzizNessuna valutazione finora
- 4 Drug-Metabolizing Enzymes 5 Nutrient Disposition and ResponseDocumento6 pagine4 Drug-Metabolizing Enzymes 5 Nutrient Disposition and ResponseTareq AzizNessuna valutazione finora
- 4 Drug-Metabolizing Enzymes 5 Nutrient Disposition and ResponseDocumento6 pagine4 Drug-Metabolizing Enzymes 5 Nutrient Disposition and ResponseTareq AzizNessuna valutazione finora
- The How and Why of COFDM - StottDocumento14 pagineThe How and Why of COFDM - StottJoe CaroselliNessuna valutazione finora
- Diet Drug Interaction ContentDocumento2 pagineDiet Drug Interaction ContentTareq AzizNessuna valutazione finora
- Diet Drug Interaction Content 2Documento2 pagineDiet Drug Interaction Content 2Tareq AzizNessuna valutazione finora
- 5 Food and Nutrition UpdateDocumento2 pagine5 Food and Nutrition UpdateTareq AzizNessuna valutazione finora
- Food and Drug InteractionDocumento4 pagineFood and Drug InteractionRafaela SernagiottoNessuna valutazione finora
- ContentDocumento3 pagineContentTareq AzizNessuna valutazione finora
- Diet Drug InteractionDocumento1 paginaDiet Drug InteractionTareq AzizNessuna valutazione finora
- Drug Diet InteractionDocumento3 pagineDrug Diet InteractionTareq AzizNessuna valutazione finora
- Drug Food Interactions in Various Therapies: Sundas Islam, Imtiaz Majeed, M. Nadeem AlviDocumento11 pagineDrug Food Interactions in Various Therapies: Sundas Islam, Imtiaz Majeed, M. Nadeem AlviTareq AzizNessuna valutazione finora
- Nutrient-Drug Interactions and FoodDocumento5 pagineNutrient-Drug Interactions and FoodRijantono Franciscus MariaNessuna valutazione finora
- Nutrient-Drug Interactions and FoodDocumento5 pagineNutrient-Drug Interactions and FoodRijantono Franciscus MariaNessuna valutazione finora
- 4 Drug-Metabolizing Enzymes 5 Nutrient Disposition and ResponseDocumento6 pagine4 Drug-Metabolizing Enzymes 5 Nutrient Disposition and ResponseTareq AzizNessuna valutazione finora
- Drug Food Interactions in Various Therapies: Sundas Islam, Imtiaz Majeed, M. Nadeem AlviDocumento11 pagineDrug Food Interactions in Various Therapies: Sundas Islam, Imtiaz Majeed, M. Nadeem AlviTareq AzizNessuna valutazione finora
- Installation, Testing and Commissioning of 8 MW Generator StatorDocumento23 pagineInstallation, Testing and Commissioning of 8 MW Generator StatorAnil PanjaniNessuna valutazione finora
- DC Electric Machine Drives ChapterDocumento59 pagineDC Electric Machine Drives ChapterAnonymous AFFiZnNessuna valutazione finora
- THHNDocumento1 paginaTHHNNed CaldejonNessuna valutazione finora
- Fujitsu Dps-450sb A 450w So-319 ReportDocumento1 paginaFujitsu Dps-450sb A 450w So-319 ReportJohn MachoNessuna valutazione finora
- Rdi 3000va 48vdc Kat List en v052009 PDFDocumento2 pagineRdi 3000va 48vdc Kat List en v052009 PDFFermin MoicheNessuna valutazione finora
- Net Zero Energy BuildingDocumento13 pagineNet Zero Energy BuildingDanicaGanNessuna valutazione finora
- Wind Speed and Generator Output Data For Calculating A Power Curve For A Wind TurbineDocumento1 paginaWind Speed and Generator Output Data For Calculating A Power Curve For A Wind TurbineDennis Dale FanogaNessuna valutazione finora
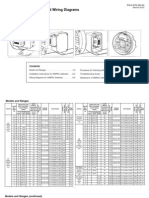
- Installation Instructions and Wiring Diagrams For All Models and RangesDocumento8 pagineInstallation Instructions and Wiring Diagrams For All Models and RangesMaria MusyNessuna valutazione finora
- Automatic Water Level Controller Using 555 TimerDocumento31 pagineAutomatic Water Level Controller Using 555 TimerFARUK KHAN100% (1)
- PDR Electricals Industrial Product GuideDocumento16 paginePDR Electricals Industrial Product GuideRachna patelNessuna valutazione finora
- VSR Solar Drive CG EmotronDocumento4 pagineVSR Solar Drive CG EmotronSuraj GawandeNessuna valutazione finora
- Exp # 07 Study of Poly-Phase Circuits Using Multisim Electronics WorkbenchDocumento13 pagineExp # 07 Study of Poly-Phase Circuits Using Multisim Electronics WorkbenchIrfan HaiderNessuna valutazione finora
- Trouble Shooting Guide (AMF) Panels OnlyDocumento5 pagineTrouble Shooting Guide (AMF) Panels OnlySudipto MajumderNessuna valutazione finora
- Koordinasi Proteksi Saluran Udara TinggiDocumento68 pagineKoordinasi Proteksi Saluran Udara TinggiHendy KurniawanNessuna valutazione finora
- CMD 2019 Power Modules Low ResDocumento44 pagineCMD 2019 Power Modules Low ResDerek OngNessuna valutazione finora
- MSD 8830Documento2 pagineMSD 8830Akhir UdinNessuna valutazione finora
- HSE 306 - ElectricalDocumento3 pagineHSE 306 - ElectricalWael HannonNessuna valutazione finora
- Power Plant Off-Grid PDFDocumento5 paginePower Plant Off-Grid PDFmak makNessuna valutazione finora
- Southwest Transmission Grid Expansion Project (RRP BAN 51137)Documento5 pagineSouthwest Transmission Grid Expansion Project (RRP BAN 51137)Nayemul Hasan NayemNessuna valutazione finora
- SUN2000-12-20KTL-M2 Datasheet - 17.05.2023Documento2 pagineSUN2000-12-20KTL-M2 Datasheet - 17.05.2023Nelson PalenciaNessuna valutazione finora
- Annunciator SDocumento4 pagineAnnunciator Sali_107Nessuna valutazione finora
- CMX 007 Adjustable Frequency DriveDocumento9 pagineCMX 007 Adjustable Frequency DriveJESUSCALVILLONessuna valutazione finora
- Watt Hour Meter - Electrical4uDocumento5 pagineWatt Hour Meter - Electrical4uVijay SundaramNessuna valutazione finora
- Adroit 450 W Spare Part Catalogue Electronics GroupDocumento4 pagineAdroit 450 W Spare Part Catalogue Electronics GroupaliNessuna valutazione finora
- Manufacturing Data Sheet: Low Voltage XLPE Cable Design Code: LVIS09CXSFY2012C2.5SA004S Date: Rev No.Documento2 pagineManufacturing Data Sheet: Low Voltage XLPE Cable Design Code: LVIS09CXSFY2012C2.5SA004S Date: Rev No.Anonymous SDeSP1Nessuna valutazione finora
- Selection Table Modular Installation Equipment With UL/CSA-ApprovalsDocumento36 pagineSelection Table Modular Installation Equipment With UL/CSA-Approvalskemmerling_13Nessuna valutazione finora