Potrebbero piacerti anche
- CuestionarioDocumento2 pagineCuestionarioJonathan Becerra MonroyNessuna valutazione finora
- Polarización en DC de Los Transistores JFETDocumento5 paginePolarización en DC de Los Transistores JFETJuan sebastian Chacón VegaNessuna valutazione finora
- 04 - Circuitos Rectificadores y FiltroDocumento11 pagine04 - Circuitos Rectificadores y Filtrodiego181802Nessuna valutazione finora
- Presentacion AmplificadorDocumento23 paginePresentacion AmplificadorRwbfwhfcb BskdbcvdhbsNessuna valutazione finora
- Clase 5, Modelos en Variables de EstadoDocumento28 pagineClase 5, Modelos en Variables de EstadoCarlos GarayNessuna valutazione finora
- 1Clase-Control-Digital 2023-1Documento56 pagine1Clase-Control-Digital 2023-1Walter Ruiz PorrasNessuna valutazione finora
- Clase 16Documento22 pagineClase 16Arturo Tadeo Calderón SalazarNessuna valutazione finora
- Labo 2 - Control DigitalDocumento20 pagineLabo 2 - Control DigitalDavid JPNessuna valutazione finora
- S02.s1 - Sistemas de Control DigitalDocumento27 pagineS02.s1 - Sistemas de Control DigitalJonas Huamani PumaNessuna valutazione finora
- Tecnica de Control Digital IDocumento68 pagineTecnica de Control Digital Ijlb1212Nessuna valutazione finora
- S01.s1 - Introducción A Los Sistemas de Control DigitalDocumento33 pagineS01.s1 - Introducción A Los Sistemas de Control DigitalSteve NuñezNessuna valutazione finora
- Ejercicios RelesDocumento13 pagineEjercicios RelesJose Carlos TorregrosaNessuna valutazione finora
- Amplificador Clase ABDocumento3 pagineAmplificador Clase ABKorange IkaNessuna valutazione finora
- S12.s2 SESIÓN 2Documento25 pagineS12.s2 SESIÓN 2kevinNessuna valutazione finora
- CLASE4-CONTROLII s4Documento24 pagineCLASE4-CONTROLII s4martin caceres tupiaNessuna valutazione finora
- S05.s2-Material de ClaseDocumento26 pagineS05.s2-Material de ClaseCleiver Iván AguilarNessuna valutazione finora
- Clase 6 Espacio de Estados PLDocumento30 pagineClase 6 Espacio de Estados PLBRYAN FABIAN SIMBA�A FERNANDEZNessuna valutazione finora
- Amplificador RestadorDocumento4 pagineAmplificador RestadorCristianFreireNessuna valutazione finora
- Tabla de Modelos MatematicosDocumento8 pagineTabla de Modelos MatematicosKevinJulianPerezTovillaNessuna valutazione finora
- Tema 3 Ao PDFDocumento8 pagineTema 3 Ao PDFJorge SGNessuna valutazione finora
- Elec Clase 2Documento26 pagineElec Clase 2Celeste SantanderNessuna valutazione finora
- S3-Invope 2Documento18 pagineS3-Invope 2Zaira HurtadoNessuna valutazione finora
- S12.s2 OPAMP Problemas Utp - PDF - ShareDocumento10 pagineS12.s2 OPAMP Problemas Utp - PDF - ShareVictor RaulNessuna valutazione finora
- Teoria de ColasDocumento74 pagineTeoria de ColasMateo Orrillo100% (1)
- Intro A Los Sistemas de Control AutomáticoDocumento14 pagineIntro A Los Sistemas de Control Automáticosharkwolf13Nessuna valutazione finora
- 04a - Programacion Dinamica DeterministicaDocumento6 pagine04a - Programacion Dinamica DeterministicaKevin Flores AlvarezNessuna valutazione finora
- S11.s1-Representacion de Variables de EstadoDocumento28 pagineS11.s1-Representacion de Variables de EstadoAntonio CamiloagaNessuna valutazione finora
- EjerciciosDocumento36 pagineEjerciciosMafeSiita LaGunaNessuna valutazione finora
- Las Variables de EstadoDocumento4 pagineLas Variables de EstadoORLANDO RODRIGUEZNessuna valutazione finora
- s05 s14 MaterialDocumento26 pagines05 s14 MaterialEdison Lujan vicañaNessuna valutazione finora
- LAB N°1 Amplificadores (1) - 2Documento9 pagineLAB N°1 Amplificadores (1) - 2Harold Joel Zurita LinaresNessuna valutazione finora
- Glab S01 Cmendiola 2023 1Documento7 pagineGlab S01 Cmendiola 2023 1Alex Fernando Arias MamaniNessuna valutazione finora
- Unidad 1 Control DigitalDocumento13 pagineUnidad 1 Control DigitalEdmundo R. NeriaNessuna valutazione finora
- CEA Cap 1Documento34 pagineCEA Cap 1Fernando MachorroNessuna valutazione finora
- IO - Semana 08Documento149 pagineIO - Semana 08Andre AlegreNessuna valutazione finora
- Lab 1-3 Amp Clase B AbDocumento25 pagineLab 1-3 Amp Clase B AbAlex ArévaloNessuna valutazione finora
- Clase 9 - Variables de EstadoDocumento52 pagineClase 9 - Variables de EstadoYubert Edisson Huanca LimaNessuna valutazione finora
- Ejercicios Control DigitalDocumento3 pagineEjercicios Control DigitalRomel PorrasNessuna valutazione finora
- Laboratorio 7 Brazo Robótico Arduino Robótica UPNDocumento8 pagineLaboratorio 7 Brazo Robótico Arduino Robótica UPNPrimus 2018Nessuna valutazione finora
- S04.s1 - Filtros Por CondensadorDocumento16 pagineS04.s1 - Filtros Por CondensadorAlejandro HigaNessuna valutazione finora
- Transistores FetDocumento47 pagineTransistores FetRocío ArriagadaNessuna valutazione finora
- S06.s1 - Filtro LCDocumento12 pagineS06.s1 - Filtro LCADrian NarvaezNessuna valutazione finora
- Examen Parcial TerminadoDocumento5 pagineExamen Parcial TerminadoAndres ManosalvaNessuna valutazione finora
- Amplificadores Clase BDocumento5 pagineAmplificadores Clase BLuis AndreNessuna valutazione finora
- Elec Clase 3Documento31 pagineElec Clase 3Celeste SantanderNessuna valutazione finora
- Ejemplo Problema de TransporteDocumento2 pagineEjemplo Problema de TransporteMarianellaTellezLazaroNessuna valutazione finora
- L5-Filtro Por CondensadorDocumento5 pagineL5-Filtro Por CondensadorLuis Diego Cuzcano RomoNessuna valutazione finora
- Corte 1.1 Introducción A La Electrónica de PotenciaDocumento12 pagineCorte 1.1 Introducción A La Electrónica de PotenciaJonny A ONNessuna valutazione finora
- Electrotecnia 1ros 12 JulDocumento13 pagineElectrotecnia 1ros 12 JulNick KlarkNessuna valutazione finora
- Filtro de CondensadorDocumento6 pagineFiltro de CondensadorJose L Huaman GasparNessuna valutazione finora
- 4-Presentación Muestreador y RetenedorDocumento33 pagine4-Presentación Muestreador y RetenedorMARIANONessuna valutazione finora
- Guia de Problemas Electronica IDocumento37 pagineGuia de Problemas Electronica IAntonio Jose Perez ZambranoNessuna valutazione finora
- Promodel Ejercicio 1Documento13 paginePromodel Ejercicio 1Richie' ZarateNessuna valutazione finora
- Simbología y AplicacionesDocumento10 pagineSimbología y AplicacionespolicomiNessuna valutazione finora
- Investigacion CAD, CAE, CAMDocumento3 pagineInvestigacion CAD, CAE, CAMEmmanuel BravoNessuna valutazione finora
- Orientacion y PosicionDocumento28 pagineOrientacion y PosicionJacky PriceNessuna valutazione finora
- Desarrollo de Un Robot Móvil Con Brazo Robótico para La Gestión de Desastres Naturales en El PerúDocumento25 pagineDesarrollo de Un Robot Móvil Con Brazo Robótico para La Gestión de Desastres Naturales en El PerúPrimus 2018Nessuna valutazione finora
- Laboratorio 6 L298 Robótica UPNDocumento6 pagineLaboratorio 6 L298 Robótica UPNPrimus 2018Nessuna valutazione finora
- Control Cinemática de VelocidadDocumento20 pagineControl Cinemática de VelocidadJose Maximo Alvarado OyolaNessuna valutazione finora
- Cinematica Inversa B II CorteDocumento4 pagineCinematica Inversa B II CorteJesus QuiñonezNessuna valutazione finora
- R-DC-91 Plantilla Propuestas de Grado-1Documento4 pagineR-DC-91 Plantilla Propuestas de Grado-1harry_gomez18Nessuna valutazione finora
- Preguntas de ControlDocumento4 paginePreguntas de Controlharry_gomez18Nessuna valutazione finora
- CosmeticaDocumento2 pagineCosmeticaharry_gomez18Nessuna valutazione finora
- TFG P 527Documento115 pagineTFG P 527harry_gomez18Nessuna valutazione finora
- Impuesto de Moto PDFDocumento2 pagineImpuesto de Moto PDFharry_gomez18Nessuna valutazione finora
- Cronograma SantanderesDocumento11 pagineCronograma Santanderesharry_gomez18Nessuna valutazione finora
- Utilidad e Importancia de ProyectosDocumento7 pagineUtilidad e Importancia de Proyectosharry_gomez18100% (2)
- Robotica Avance Proyecto I 3 DOFDocumento2 pagineRobotica Avance Proyecto I 3 DOFharry_gomez18Nessuna valutazione finora
- Manual de Procedimientos DentalesDocumento39 pagineManual de Procedimientos DentalesLUIS ANGEL HERNANDEZ GORDILLONessuna valutazione finora
- Personas Físicas, Proveedores Informales y FormalesDocumento3 paginePersonas Físicas, Proveedores Informales y FormalesArgeny Gonzalez RosarioNessuna valutazione finora
- Taller de Generacion de Las Computadoras Sexto I PeriodoDocumento2 pagineTaller de Generacion de Las Computadoras Sexto I PeriodoYennis OrozcoNessuna valutazione finora
- DOP ResumenDocumento4 pagineDOP ResumenAnonymous yNMZplPbVNessuna valutazione finora
- MARCO TEORICO Terminal-1Documento22 pagineMARCO TEORICO Terminal-1Marylena GutierrezNessuna valutazione finora
- S06.S2 - MaterialDocumento32 pagineS06.S2 - MaterialMilton Mejia MariñoNessuna valutazione finora
- Prostatitis Aguda y CronicaDocumento17 pagineProstatitis Aguda y CronicaTati M SuxeNessuna valutazione finora
- Ev4 - Planificar - Rutas - Transp - Distribucion - HENRY BENITEZ - ALEXANDER PANIAGUADocumento7 pagineEv4 - Planificar - Rutas - Transp - Distribucion - HENRY BENITEZ - ALEXANDER PANIAGUATorres ValentinaNessuna valutazione finora
- 5º Web C 13 MayoDocumento3 pagine5º Web C 13 MayolyzNessuna valutazione finora
- Primera Guerra MundialDocumento3 paginePrimera Guerra MundialThaliana SalcedoNessuna valutazione finora
- Sociedad Colonial Ciudad Colonial Vivienda Plaza PúblicaDocumento21 pagineSociedad Colonial Ciudad Colonial Vivienda Plaza PúblicavaniapaeNessuna valutazione finora
- Ingeniería de Yacimientos de GasDocumento7 pagineIngeniería de Yacimientos de GasluisNessuna valutazione finora
- Sena 1Documento5 pagineSena 1Liliana AcostaNessuna valutazione finora
- 10.revista Canadiense de Educacin Cientfica Matemtica y Tecnolgica - En.esDocumento18 pagine10.revista Canadiense de Educacin Cientfica Matemtica y Tecnolgica - En.esarmando antonio ramirez perezNessuna valutazione finora
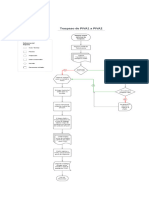
- Procesos de Envios de PIVA1 A PIVA2Documento1 paginaProcesos de Envios de PIVA1 A PIVA2casa.maravillas273Nessuna valutazione finora
- Fonema Y - LL PLAN DE CLASE SEMANAL 2017Documento3 pagineFonema Y - LL PLAN DE CLASE SEMANAL 2017pfrancoh0567% (3)
- Argentina - Catalogo DW 2019Documento64 pagineArgentina - Catalogo DW 2019Mechanical WNNessuna valutazione finora
- Marco General y Proceso Constructivo Del Puente Allccomachay-1-25Documento25 pagineMarco General y Proceso Constructivo Del Puente Allccomachay-1-25Angelo Renato Lazo ParedesNessuna valutazione finora
- BATALLANDocumento24 pagineBATALLANMariel BufariniNessuna valutazione finora
- Arras y Joint VentureDocumento33 pagineArras y Joint VentureKenny Arriaga RodríguezNessuna valutazione finora
- GCC-F-55 - FormatoDeclaracionjuramentadadelanoexistenciadeconflictodeinteresversion - P2592 Grupo 2Documento2 pagineGCC-F-55 - FormatoDeclaracionjuramentadadelanoexistenciadeconflictodeinteresversion - P2592 Grupo 2Claudia LopezNessuna valutazione finora
- Haftara 47 ReeDocumento4 pagineHaftara 47 ReeKehila en Casa Volviendo a las Primeras ObrasNessuna valutazione finora
- Gabi I IiiiiiDocumento12 pagineGabi I IiiiiiBernardo MiguelNessuna valutazione finora
- Metacognicion MartiDocumento25 pagineMetacognicion MartiCristian Martin JofreNessuna valutazione finora
- Esquina PeligrosaDocumento2 pagineEsquina PeligrosaNorma CastilloNessuna valutazione finora
- Carburadores BresselDocumento13 pagineCarburadores BresselJimmy Spencer Ramirez Romero100% (1)
- 1-Plan de Unidad Caminadores N°2Documento1 pagina1-Plan de Unidad Caminadores N°2Liliana Guerrero NuñezNessuna valutazione finora
- Galletas Nutri HDocumento13 pagineGalletas Nutri Hmelissa ramos macedoNessuna valutazione finora
- Tablas de Valoracion Documental IserviDocumento62 pagineTablas de Valoracion Documental IserviFanny Ortiz100% (1)
- Catedral de Brasilia InteriorDocumento4 pagineCatedral de Brasilia InteriorRaquel AscencioNessuna valutazione finora