Potrebbero piacerti anche
- Trabalh Anexos EscalasDocumento172 pagineTrabalh Anexos EscalascarolineNessuna valutazione finora
- SegredosdosTestes de InteligenciaDocumento19 pagineSegredosdosTestes de InteligenciaDirce SanematsuNessuna valutazione finora
- Luto Perinatal - UCPPDocumento18 pagineLuto Perinatal - UCPPMarianna dos SantosNessuna valutazione finora
- Psicologia perinatalDocumento4 paginePsicologia perinatalPriscila AlmeidaNessuna valutazione finora
- O papel do psicólogo em uma UTI neonatalDocumento11 pagineO papel do psicólogo em uma UTI neonatalLene RochaNessuna valutazione finora
- Classificação Inteligência HumanaDocumento33 pagineClassificação Inteligência HumanaJosé Fonseca100% (1)
- A Importância Do Psicólogo em Hospitais Nos Casos de Transtorno PuerperalDocumento21 pagineA Importância Do Psicólogo em Hospitais Nos Casos de Transtorno PuerperalSheila MotaNessuna valutazione finora
- Como desacelerar criança TDAHDocumento19 pagineComo desacelerar criança TDAHCarolina Mendes CruzNessuna valutazione finora
- n84 - G - Propedutica Bsica Da Infertilidade ConjugalDocumento20 paginen84 - G - Propedutica Bsica Da Infertilidade ConjugalYasmin MonteiroNessuna valutazione finora
- Desperdiçadores do Tempo nas OrganizaçõesDocumento3 pagineDesperdiçadores do Tempo nas OrganizaçõesCordeiro Júnior FranciscoNessuna valutazione finora
- Material de Apoio Oficina de GestantesDocumento3 pagineMaterial de Apoio Oficina de GestantesRaquel AzevedoNessuna valutazione finora
- História Do Chá e Sua ImportânciaDocumento19 pagineHistória Do Chá e Sua ImportânciaGabriel CaseiroNessuna valutazione finora
- Escola Secundária Autoavaliação Alunos HistóriaDocumento3 pagineEscola Secundária Autoavaliação Alunos HistóriaManuel MartinsNessuna valutazione finora
- Tutoria 2 - Embriologia Do SNDocumento3 pagineTutoria 2 - Embriologia Do SNAna Paula Viégas100% (1)
- Prova de Matemática do 7o Ano com 25 QuestõesDocumento13 pagineProva de Matemática do 7o Ano com 25 QuestõesOtavio NetoNessuna valutazione finora
- Teoria de Resolução de ProblemasDocumento5 pagineTeoria de Resolução de ProblemasnewtonNessuna valutazione finora
- Avaliação trimestral de matemática do 3o ano com 1-21 exercíciosDocumento7 pagineAvaliação trimestral de matemática do 3o ano com 1-21 exercíciosSENessuna valutazione finora
- Resumao de Limites Do Responde AiDocumento6 pagineResumao de Limites Do Responde AiWeiller Rafael Galli SilvaNessuna valutazione finora
- Motores de CCDocumento45 pagineMotores de CCLuiz Carlos100% (3)
- Motores de CCDocumento45 pagineMotores de CCLuiz Carlos100% (3)
- Motores de CCDocumento45 pagineMotores de CCLuiz Carlos100% (3)
- Motores de CCDocumento45 pagineMotores de CCLuiz Carlos100% (3)
- Motores de CCDocumento45 pagineMotores de CCLuiz Carlos100% (3)
- PsicomotricidadeDocumento10 paginePsicomotricidadeDalila MeurerNessuna valutazione finora
- Segredos PsicotécnicosDocumento24 pagineSegredos PsicotécnicosSofiaCostaNessuna valutazione finora
- Livro Texto de Calculo III - Gilvan LimaDocumento124 pagineLivro Texto de Calculo III - Gilvan LimaFabio AlvesNessuna valutazione finora
- Termómetros Emocionais AutoavaliaçãoDocumento1 paginaTermómetros Emocionais AutoavaliaçãoInês Sequeira100% (1)
- O plano cartesiano: representando pontos e figuras geométricasDocumento3 pagineO plano cartesiano: representando pontos e figuras geométricasEllen CristinaNessuna valutazione finora
- Análise de Algoritmos ExercíciosDocumento2 pagineAnálise de Algoritmos ExercíciosRaquel MarcondesNessuna valutazione finora
- Avaliação das FEs e atenção em crianças com TDAHDocumento123 pagineAvaliação das FEs e atenção em crianças com TDAHAdriane CarqueijoNessuna valutazione finora
- Tese Joana PinhoDocumento67 pagineTese Joana PinhoAlexandre De Figueiredo PazinNessuna valutazione finora
- Jogo das Cores de Vygotsky aplicado em criançaDocumento11 pagineJogo das Cores de Vygotsky aplicado em criançarabn123Nessuna valutazione finora
- Mabom - CiurbDocumento541 pagineMabom - CiurbFabricio LopesNessuna valutazione finora
- Gravidez completa guiapaisDocumento113 pagineGravidez completa guiapaismelnicNessuna valutazione finora
- Gravidez: Aspectos Psicológicos em 3 FasesDocumento17 pagineGravidez: Aspectos Psicológicos em 3 FasesNilmarryNessuna valutazione finora
- Desenvolvimento Humano - 01 - Gestação, Parto e PuerpérioDocumento4 pagineDesenvolvimento Humano - 01 - Gestação, Parto e PuerpérioPablo RossatoNessuna valutazione finora
- Direitos da Gestante SUSDocumento19 pagineDireitos da Gestante SUSAlice Costa LinsNessuna valutazione finora
- 2018.08.20 - Influência Do Período Pré e PerinatalDocumento13 pagine2018.08.20 - Influência Do Período Pré e PerinatalmilenaNessuna valutazione finora
- Operadora de Distribuio ReferencialEFADocumento6 pagineOperadora de Distribuio ReferencialEFATiago SantosNessuna valutazione finora
- Dinâmicas SensaçõesDocumento131 pagineDinâmicas SensaçõesMaria João ConceiçãoNessuna valutazione finora
- Gravidez e Toxicodependência 2Documento41 pagineGravidez e Toxicodependência 2CDuque100% (6)
- Manual Técnico Gestação de Alto Risco 2012Documento302 pagineManual Técnico Gestação de Alto Risco 2012Márcio MartinsNessuna valutazione finora
- UNO Picante do AmorDocumento13 pagineUNO Picante do AmorveronicaNessuna valutazione finora
- Perfil Funções TurismoDocumento3 paginePerfil Funções Turismodeboramonteiro14100% (1)
- Motivação no trabalho avaliada por questionário MMTDocumento1 paginaMotivação no trabalho avaliada por questionário MMTBarbara B. GuimaraesNessuna valutazione finora
- Instrumentos para Avaliação Transtornos AlimentaresDocumento8 pagineInstrumentos para Avaliação Transtornos AlimentaresCláudia FerreiraNessuna valutazione finora
- Manual Gestante de Alto RiscoDocumento304 pagineManual Gestante de Alto RiscoElaina Gonçalves Silva FurlanNessuna valutazione finora
- Programa Formação 9022Documento2 paginePrograma Formação 9022Ana CatarinaNessuna valutazione finora
- 2010 Referência Manual Técnico Gestação de Alto RiscoDocumento304 pagine2010 Referência Manual Técnico Gestação de Alto Riscopaulocc1261Nessuna valutazione finora
- Detalhe Da UFCDDocumento2 pagineDetalhe Da UFCDPaulo BatistaNessuna valutazione finora
- Hackman e OldhamDocumento12 pagineHackman e Oldhambi_rebelloNessuna valutazione finora
- Pgs Cartilha Nova AdaDocumento23 paginePgs Cartilha Nova AdagrupointermedicaNessuna valutazione finora
- Técnicas e Processos de SeleçãoDocumento76 pagineTécnicas e Processos de SeleçãoWanderson CunhaNessuna valutazione finora
- Ficha 1 - Atividade ZeroDocumento2 pagineFicha 1 - Atividade ZeroAlda Biscaia SantosNessuna valutazione finora
- A Importância Da Tomada de DecisãoDocumento2 pagineA Importância Da Tomada de DecisãoWilliam TeodoroNessuna valutazione finora
- Desenvolvimento infantil de 0 a 12 mesesDocumento4 pagineDesenvolvimento infantil de 0 a 12 mesesPedro CabralNessuna valutazione finora
- Psicodiagnóstico - InfânciaDocumento10 paginePsicodiagnóstico - InfânciaKamila GadelhaNessuna valutazione finora
- Profissiografia do Agente de Polícia: tarefas e requisitosDocumento53 pagineProfissiografia do Agente de Polícia: tarefas e requisitosTR RetificaNessuna valutazione finora
- Teste de Levene para igualdade de variânciasDocumento1 paginaTeste de Levene para igualdade de variânciasRay Sant'AnnaNessuna valutazione finora
- PlanejamentoFatorialI PDFDocumento85 paginePlanejamentoFatorialI PDFBruno MoraisNessuna valutazione finora
- Bateria Neuropsicológica de Lisboa TestesDocumento3 pagineBateria Neuropsicológica de Lisboa TestesPauloNessuna valutazione finora
- Alfa de CronbachDocumento3 pagineAlfa de CronbachJuan luis Espinoza amayaNessuna valutazione finora
- Estatística Aplicada à BioestatísticaDocumento26 pagineEstatística Aplicada à Bioestatísticafasantos11Nessuna valutazione finora
- Curso Sobre a Escala de Avaliação das Competências no Desenvolvimento Infantil IIDocumento5 pagineCurso Sobre a Escala de Avaliação das Competências no Desenvolvimento Infantil IIDaniela NevesNessuna valutazione finora
- Adaptação da Escala de Ansiedade de Beck para Surdos e CegosDocumento105 pagineAdaptação da Escala de Ansiedade de Beck para Surdos e CegosEduardo EwertonNessuna valutazione finora
- Reunião de Família. Caio Fernando AbreuDocumento38 pagineReunião de Família. Caio Fernando AbreuMélanie RodriguesNessuna valutazione finora
- Apostila de Probabilidade e EstatísticaDocumento113 pagineApostila de Probabilidade e EstatísticaMario FilhoNessuna valutazione finora
- Variancia e Desvio PadraoDocumento7 pagineVariancia e Desvio PadraoJoão de MouraNessuna valutazione finora
- TESE MESTRADO HÉLDER CUNHA ISEC Nº20130393 - 14 Novembro de 2016Documento202 pagineTESE MESTRADO HÉLDER CUNHA ISEC Nº20130393 - 14 Novembro de 2016Letícia Cunha100% (1)
- Questionário de Avaliação de Sessões em GrupoDocumento2 pagineQuestionário de Avaliação de Sessões em GrupoSandra SantosNessuna valutazione finora
- Redes neurais para reconhecimento facial utilizando imagens de profundidadeDocumento77 pagineRedes neurais para reconhecimento facial utilizando imagens de profundidadeIgor PaladinoNessuna valutazione finora
- Práticas PDSDocumento23 paginePráticas PDSxoftspylagNessuna valutazione finora
- Trabalho de Principios - N1Documento37 pagineTrabalho de Principios - N1Fladimy RochaNessuna valutazione finora
- 10 Trabalho em Grupo - Gestão de ProjetosDocumento7 pagine10 Trabalho em Grupo - Gestão de ProjetosGuilherme RodriguesNessuna valutazione finora
- 9 Trabalho em Grupo - Gestão - Piscina AlvenariaDocumento2 pagine9 Trabalho em Grupo - Gestão - Piscina AlvenariaGuilherme RodriguesNessuna valutazione finora
- Azeite TMI IIDocumento11 pagineAzeite TMI IIGuilherme RodriguesNessuna valutazione finora
- Curso Engenharia Produção Disciplina Controle MalhaDocumento4 pagineCurso Engenharia Produção Disciplina Controle MalhaGuilherme RodriguesNessuna valutazione finora
- Curso Engenharia Produção Disciplina Controle MalhaDocumento4 pagineCurso Engenharia Produção Disciplina Controle MalhaGuilherme RodriguesNessuna valutazione finora
- Tática OpCIUrb CAETODocumento26 pagineTática OpCIUrb CAETOGuilherme RodriguesNessuna valutazione finora
- Stihl MS 170 - 180Documento52 pagineStihl MS 170 - 180Pablo OliveiraNessuna valutazione finora
- Instrumentação e Controle-MescladoDocumento4 pagineInstrumentação e Controle-MescladoGuilherme RodriguesNessuna valutazione finora
- Tática OpCIUrb CAETODocumento26 pagineTática OpCIUrb CAETOGuilherme RodriguesNessuna valutazione finora
- Curso Engenharia Produção Disciplina Controle MalhaDocumento4 pagineCurso Engenharia Produção Disciplina Controle MalhaGuilherme RodriguesNessuna valutazione finora
- Regulamento da AMAN define estrutura e atribuiçõesDocumento27 pagineRegulamento da AMAN define estrutura e atribuiçõesGuilherme RodriguesNessuna valutazione finora
- Be49 17Documento117 pagineBe49 17Adailton SalesNessuna valutazione finora
- Poder Executivo: Parte IDocumento48 paginePoder Executivo: Parte IGuilherme RodriguesNessuna valutazione finora
- Trabalho de EletricaDocumento6 pagineTrabalho de EletricaGuilherme RodriguesNessuna valutazione finora
- Be49 17Documento117 pagineBe49 17Adailton SalesNessuna valutazione finora
- TRABALHO DE TMI II - FinalDocumento22 pagineTRABALHO DE TMI II - FinalGuilherme RodriguesNessuna valutazione finora
- Regulamento da AMAN define estrutura e atribuiçõesDocumento27 pagineRegulamento da AMAN define estrutura e atribuiçõesGuilherme RodriguesNessuna valutazione finora
- Propriedades químicas GLPDocumento5 paginePropriedades químicas GLPGuilherme RodriguesNessuna valutazione finora
- Pedro Quintal 2003115271 2012 RFDocumento84 paginePedro Quintal 2003115271 2012 RFGuilherme RodriguesNessuna valutazione finora
- Ie Ea Eaoear 2019Documento58 pagineIe Ea Eaoear 2019KaioFernandesNessuna valutazione finora
- 10 Dicas Da QualidadeDocumento11 pagine10 Dicas Da QualidadeGuilherme RodriguesNessuna valutazione finora
- Socialism oDocumento4 pagineSocialism oGuilherme RodriguesNessuna valutazione finora
- Ie Ea Eaoear 2019Documento58 pagineIe Ea Eaoear 2019KaioFernandesNessuna valutazione finora
- Roteiro de aula sobre balonismoDocumento13 pagineRoteiro de aula sobre balonismoluciano ljNessuna valutazione finora
- Ajustamento Observações MMQDocumento2 pagineAjustamento Observações MMQime_cartografia0% (1)
- Trigonometria Super ResumidaDocumento37 pagineTrigonometria Super ResumidaTelma Castro SilvaNessuna valutazione finora
- Matlab Simulink IntroduçãoDocumento58 pagineMatlab Simulink IntroduçãoMarcelo CadNessuna valutazione finora
- Prova Antiga Cálculo UfcDocumento1 paginaProva Antiga Cálculo UfcSidney RobertoNessuna valutazione finora
- Construção Por Régua e Compasso - Evelyn MuradDocumento29 pagineConstrução Por Régua e Compasso - Evelyn MuradEvelyn Cardozo MuradNessuna valutazione finora
- Interpolação Polinômial Por LagrangeDocumento6 pagineInterpolação Polinômial Por LagrangeDiego Oliveira100% (2)
- Qdoc - Tips Nardini Manual de Programaao e Operaao Logic 195 IDocumento57 pagineQdoc - Tips Nardini Manual de Programaao e Operaao Logic 195 IJulio StahlNessuna valutazione finora
- AP3 CG 2013 2 GaabritoDocumento3 pagineAP3 CG 2013 2 GaabritoGlaucia PiresNessuna valutazione finora
- NBT143 - Rel - 02 - Variáveis e OperadoresDocumento5 pagineNBT143 - Rel - 02 - Variáveis e OperadoresEdson GimenezNessuna valutazione finora
- Revisão Simat - 8º ClássicoDocumento26 pagineRevisão Simat - 8º ClássicoDavfonbZNessuna valutazione finora
- Apostila de Matemática BásicaDocumento376 pagineApostila de Matemática BásicaLuis Antonio J. SilvaNessuna valutazione finora
- Monómios e polinómios na aula de apoio de matemáticaDocumento2 pagineMonómios e polinómios na aula de apoio de matemáticaCristina MeirelesNessuna valutazione finora
- Lista 03 - Calculo 2 UFRPEDocumento2 pagineLista 03 - Calculo 2 UFRPEAlcidio TenaniNessuna valutazione finora
- Habilidades Essenciais 2º BimestreDocumento63 pagineHabilidades Essenciais 2º BimestreMilena Yamashita SatoNessuna valutazione finora
- Verificação de aprendizagem em Matemática para alunos do 5o anoDocumento5 pagineVerificação de aprendizagem em Matemática para alunos do 5o anoSania Alves MedeirosNessuna valutazione finora
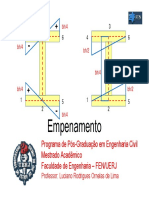
- Análise do empenamento em seções não-circulares sob torção não-uniformeDocumento30 pagineAnálise do empenamento em seções não-circulares sob torção não-uniformeChristina FarrellNessuna valutazione finora
- Lista de MatemáticaDocumento4 pagineLista de MatemáticaPaulo Alexandre LimaNessuna valutazione finora
- A Bicicleta de Lévi-Strauss (Patrice Maniglier)Documento9 pagineA Bicicleta de Lévi-Strauss (Patrice Maniglier)Thiago PereiraNessuna valutazione finora
- Introdução à ProgramaçãoDocumento123 pagineIntrodução à ProgramaçãoLaio CastanholaNessuna valutazione finora
- Ipaee 201702 Aula3 Parte2 ProbabilidadeDocumento41 pagineIpaee 201702 Aula3 Parte2 ProbabilidadeAgustin Gabriel Rubilar UndaNessuna valutazione finora
- Portal para o OesteDocumento4 paginePortal para o OesteMatheus BrandãoNessuna valutazione finora
- Prova Sesc DFDocumento8 pagineProva Sesc DFAmanda Gonçalves RibeiroNessuna valutazione finora
- Educação infantil português lista animais letra JDocumento33 pagineEducação infantil português lista animais letra JRonaldo Duarte OliveiraNessuna valutazione finora