Potrebbero piacerti anche
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- RM Chapterwise MCQDocumento38 pagineRM Chapterwise MCQABHIJIT S. SARKAR71% (7)
- Instruction For Trust Account: Sogotrade New Account ContactDocumento10 pagineInstruction For Trust Account: Sogotrade New Account ContactVasishtha TeeluckdharryNessuna valutazione finora
- Calculus Cheat Sheet Limits Definitions Limit at InfinityDocumento11 pagineCalculus Cheat Sheet Limits Definitions Limit at Infinityapi-1192241886% (7)
- Social Studies Syllabus Primary School TrinidadDocumento213 pagineSocial Studies Syllabus Primary School TrinidadTrisha A-r100% (1)
- History & Schools of Psychology - Functionalism and BehaviorismDocumento36 pagineHistory & Schools of Psychology - Functionalism and BehaviorismIrzaNessuna valutazione finora
- Oliver Theobald Machine LearningDocumento172 pagineOliver Theobald Machine LearningMuhammad amirNessuna valutazione finora
- Needs Analysis QuestionnaireDocumento4 pagineNeeds Analysis QuestionnaireWulanSariNurHuda100% (1)
- Scientific Revolution, Enlightenment, French RevolutionDocumento2 pagineScientific Revolution, Enlightenment, French RevolutionTamara Lewis0% (1)
- (Synthese Library 389) Norwood Russell Hanson, Matthew D. Lund - Perception and Discovery (2018, Springer International Publishing) PDFDocumento348 pagine(Synthese Library 389) Norwood Russell Hanson, Matthew D. Lund - Perception and Discovery (2018, Springer International Publishing) PDFIduán García100% (1)
- Marcus GarveyDocumento58 pagineMarcus GarveyVasishtha TeeluckdharryNessuna valutazione finora
- Instruction For New AccountDocumento7 pagineInstruction For New AccountVasishtha TeeluckdharryNessuna valutazione finora
- Wire Deposit InstructionsDocumento1 paginaWire Deposit InstructionsVasishtha TeeluckdharryNessuna valutazione finora
- Ndi1st Term ResultgloopecsDocumento19 pagineNdi1st Term ResultgloopecstaridanNessuna valutazione finora
- MEM331 Syllabus 2013-45Documento3 pagineMEM331 Syllabus 2013-45Sam Yang SunNessuna valutazione finora
- Content Book 20118 19 For PEF SchoolsDocumento331 pagineContent Book 20118 19 For PEF SchoolsMuhammad Umar FarooqNessuna valutazione finora
- 4.determines The Objectives and Structures of ReportsDocumento23 pagine4.determines The Objectives and Structures of ReportsJustineNessuna valutazione finora
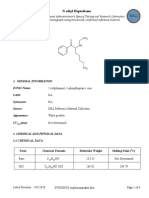
- N-Ethyl HeptedroneDocumento4 pagineN-Ethyl HeptedroneDiana Daschner (Mirenia)Nessuna valutazione finora
- Oxford Reference: Critical TheoryDocumento3 pagineOxford Reference: Critical TheoryRuben MeijerinkNessuna valutazione finora
- Pacte 2000Documento13 paginePacte 2000Littleone8Nessuna valutazione finora
- Unit 1: Rehabilitation EngineeringDocumento28 pagineUnit 1: Rehabilitation EngineeringPrasidha PrabhuNessuna valutazione finora
- Chapter 2 Units and MeasurementsDocumento6 pagineChapter 2 Units and MeasurementsAshwini PramodNessuna valutazione finora
- Richard E. NisbettDocumento3 pagineRichard E. NisbettElsaNessuna valutazione finora
- LEGNA FORMS. For Teachers School Heads and District SupervisorsDocumento11 pagineLEGNA FORMS. For Teachers School Heads and District SupervisorsJonalis Mait MandrialNessuna valutazione finora
- What Is Engineering PDFDocumento3 pagineWhat Is Engineering PDFm1nitk 19100% (1)
- Preferred Reporting Statements For Systemacit Reviews and Meta AnalysesDocumento8 paginePreferred Reporting Statements For Systemacit Reviews and Meta AnalysesJonathan PratamaNessuna valutazione finora
- CBSE Sample Papers For Class 8Documento7 pagineCBSE Sample Papers For Class 8Shrikant ShuklaNessuna valutazione finora
- Anthropology (ANTH-401) : Dr. Inam Ullah WattooDocumento13 pagineAnthropology (ANTH-401) : Dr. Inam Ullah WattooDr. Inam Ullah WattooNessuna valutazione finora
- Notice 1497252318Documento29 pagineNotice 1497252318Gurprit singhNessuna valutazione finora
- Thinking SkillsDocumento8 pagineThinking SkillsmchonvicNessuna valutazione finora
- Synthesis PaperDocumento3 pagineSynthesis PaperCezanne Cruz100% (1)
- Hypothesis Testing: Before Any Sample Readings Are ConsideredDocumento8 pagineHypothesis Testing: Before Any Sample Readings Are ConsideredSiti MaimunahNessuna valutazione finora
- 2018 Summer Semester Manual PDFDocumento13 pagine2018 Summer Semester Manual PDFEmilyLawNessuna valutazione finora
- Corporate GovernanceDocumento3 pagineCorporate GovernanceZeeshanSameenNessuna valutazione finora
- CMO8 s2016 PDFDocumento44 pagineCMO8 s2016 PDFRomy WacasNessuna valutazione finora
- Connelly Youth of The NationDocumento371 pagineConnelly Youth of The NationPapaDeltaFoxtrotNessuna valutazione finora
- ESEO The Effect of Collaborative Learning On Students Social Interaction 1 1 2Documento10 pagineESEO The Effect of Collaborative Learning On Students Social Interaction 1 1 2Eizell Andrea S. LajaraNessuna valutazione finora