Potrebbero piacerti anche
- Nivelación TrigonométricaDocumento15 pagineNivelación TrigonométricaAntonio EncinasNessuna valutazione finora
- Levantamiento Por RadiaciónDocumento13 pagineLevantamiento Por RadiaciónDeener Paredes GarridoNessuna valutazione finora
- Alcantarillas, Aspectos Básicos de DiseñoDocumento11 pagineAlcantarillas, Aspectos Básicos de DiseñoMaricela ReyesNessuna valutazione finora
- BrujulasDocumento4 pagineBrujulasRichmary Carolina Duarte LopezNessuna valutazione finora
- Metodo de AzimutDocumento20 pagineMetodo de AzimutOctavio Mondragon ArzateNessuna valutazione finora
- Topografia IIDocumento30 pagineTopografia IILuis DNessuna valutazione finora
- Trabajo Practico Nº2 TopografiaDocumento12 pagineTrabajo Practico Nº2 TopografiaPablo PalomoNessuna valutazione finora
- Nivelación IndirectaDocumento5 pagineNivelación IndirectaJosé Luis Santillán TafurNessuna valutazione finora
- Métodos de nivelación topográfica y altimetríaDocumento68 pagineMétodos de nivelación topográfica y altimetríaMiriOrsetti100% (2)
- Curso de TopografíaDocumento144 pagineCurso de Topografíapecko100% (2)
- Levantamiento Topografico Poligonal y RadialDocumento10 pagineLevantamiento Topografico Poligonal y RadialVanessaNessuna valutazione finora
- Informe de Poligonal Cerrada PDFDocumento9 pagineInforme de Poligonal Cerrada PDFRosita Quispe TicseNessuna valutazione finora
- Rpl7-1 La Alineacion RectaDocumento16 pagineRpl7-1 La Alineacion RectaWilder Muñoz RiveraNessuna valutazione finora
- Estación TotalDocumento54 pagineEstación TotalJudith Briceño100% (1)
- Perfil-Longitudinal y TransversalDocumento13 paginePerfil-Longitudinal y TransversalAurelio Quispe TtitoNessuna valutazione finora
- Topografia Clásica - 2aversionDocumento67 pagineTopografia Clásica - 2aversionKatilux Pg100% (1)
- Capitulo 2. Nociones de TopografiaDocumento15 pagineCapitulo 2. Nociones de TopografiaSamuel Dav GuerreroNessuna valutazione finora
- Dibujo TopograficoDocumento8 pagineDibujo TopograficoJosé RivasNessuna valutazione finora
- Configuracion de Estacion TotalDocumento4 pagineConfiguracion de Estacion TotalMely Aguilar0% (1)
- Informe de Poligonal AbiertaDocumento8 pagineInforme de Poligonal AbiertaDiego Armando Gutierrez PerezNessuna valutazione finora
- Informe Poligonal AbiertaDocumento20 pagineInforme Poligonal AbiertaCarolina CuevasNessuna valutazione finora
- Practica de La Estacion TotalDocumento3 paginePractica de La Estacion TotalErik OrtegaNessuna valutazione finora
- Poligonal CerradaDocumento20 paginePoligonal CerradaRaúl Azañero BastraNessuna valutazione finora
- Manejo Del NivelDocumento22 pagineManejo Del NivelJavier Rosales GranadosNessuna valutazione finora
- La Nivelación en Topografía Es Un Proceso de Medición de Elevaciones o Altitudes de Puntos Sobre La Superficie de La TierraDocumento10 pagineLa Nivelación en Topografía Es Un Proceso de Medición de Elevaciones o Altitudes de Puntos Sobre La Superficie de La TierraGabriela BardelliniNessuna valutazione finora
- Ajuste Topografico en Coordenadas UtmDocumento7 pagineAjuste Topografico en Coordenadas UtmWilliams Medina Ramirez0% (1)
- Corrección Del Desplazamiento Debido Al RelieveDocumento18 pagineCorrección Del Desplazamiento Debido Al RelieveJUAN MANUEL MEJIA HERNANDEZNessuna valutazione finora
- Estación Total y DistanciometroDocumento3 pagineEstación Total y DistanciometroKarol MendezNessuna valutazione finora
- Aforo de RíosDocumento9 pagineAforo de RíosDeyberBlancoNessuna valutazione finora
- EJERCICIOS DeflexionesDocumento2 pagineEJERCICIOS DeflexionesfreddyNessuna valutazione finora
- TopografiaDocumento93 pagineTopografiaJ RRNessuna valutazione finora
- Clase 02-Direcciones HorizontalesDocumento34 pagineClase 02-Direcciones HorizontalesJuan Luis Valencia MamaniNessuna valutazione finora
- Informe de Teodolito Poligonal Cerrada PDFDocumento13 pagineInforme de Teodolito Poligonal Cerrada PDFRojas Cazo EfrainNessuna valutazione finora
- Levantamiento Topografico Con CintaDocumento14 pagineLevantamiento Topografico Con CintaAlberto Tupa Ortiz0% (1)
- Práctica 4 Levantamiento Topográfico Por El Método de Radiación y Poligonal CerradaDocumento15 paginePráctica 4 Levantamiento Topográfico Por El Método de Radiación y Poligonal CerradaMiguelNessuna valutazione finora
- Sistema de alcantarillado sanitario y pluvialDocumento19 pagineSistema de alcantarillado sanitario y pluvialPablo Ramirez UrbanoNessuna valutazione finora
- Triptico Ingenieria Civil TopografiaDocumento2 pagineTriptico Ingenieria Civil TopografiaDaniel Carlos Quispe DávilaNessuna valutazione finora
- 14CAPITULO 7. Medidas de Ángulos Con TeodolitoDocumento10 pagine14CAPITULO 7. Medidas de Ángulos Con TeodolitoCristhian CarlosNessuna valutazione finora
- Levantamiento Topográfico Por El Método Del Poligonal CerradaDocumento14 pagineLevantamiento Topográfico Por El Método Del Poligonal CerradaPedro Noe CMNessuna valutazione finora
- Levantamientos TopograficosDocumento19 pagineLevantamientos TopograficosedithNessuna valutazione finora
- Tipos de PoligonalesDocumento22 pagineTipos de PoligonalesIrcia CardenasNessuna valutazione finora
- Practica 1 de TopografiaDocumento7 paginePractica 1 de Topografiayahil350100% (1)
- Clase de Topografia 1205963419755511 3Documento94 pagineClase de Topografia 1205963419755511 3Fercho GonzálezNessuna valutazione finora
- Como Realizar Un Levantamiento Topográfico Con Estación TotalDocumento5 pagineComo Realizar Un Levantamiento Topográfico Con Estación TotalGabriel SosaNessuna valutazione finora
- TeodolitoDocumento21 pagineTeodolitopipex550% (1)
- Proyecto Leventamiento Topografico de Una Piscina OlimpicaDocumento5 pagineProyecto Leventamiento Topografico de Una Piscina OlimpicaJaime Pari PatricioNessuna valutazione finora
- Manual Planimetro DigitalDocumento11 pagineManual Planimetro DigitalOscarDavidMorenoCogolloNessuna valutazione finora
- Transitos, Teodolitos y Estaciones TotalesDocumento19 pagineTransitos, Teodolitos y Estaciones TotalesAna Luisa PeñalbaNessuna valutazione finora
- Calculo de Angulos InternosDocumento33 pagineCalculo de Angulos InternosBrayan Xavier AdamsNessuna valutazione finora
- Topografia General AltimetriaDocumento50 pagineTopografia General AltimetriaManuel Teodoro Rashts LockNessuna valutazione finora
- Replanteo Curva Circular SimpleDocumento8 pagineReplanteo Curva Circular SimpleNicolásNessuna valutazione finora
- Análisis, Interpretación y Corrección de Errores de Una Poligonal CerradaDocumento19 pagineAnálisis, Interpretación y Corrección de Errores de Una Poligonal CerradaDANIEL FERNANDO VEGA MEZANessuna valutazione finora
- Todo Sobre TeodolitoDocumento54 pagineTodo Sobre TeodolitoFranco HergamNessuna valutazione finora
- Nivelacion Geometrica Simple CerradaDocumento32 pagineNivelacion Geometrica Simple CerradaAlexandra TrujilloNessuna valutazione finora
- Manejo de La Estacion TotalDocumento18 pagineManejo de La Estacion TotalDaniela ObregónNessuna valutazione finora
- Brujula TopograficaDocumento23 pagineBrujula TopograficasaulNessuna valutazione finora
- Manual de civil 3D aplicado a proyectos vialesDa EverandManual de civil 3D aplicado a proyectos vialesNessuna valutazione finora
- Capitulo 1 La BrujulaDocumento9 pagineCapitulo 1 La BrujulaJuan ApoloNessuna valutazione finora
- Origen y uso brújula topografíaDocumento9 pagineOrigen y uso brújula topografíaValentinaNessuna valutazione finora
- Peine de BartonDocumento9 paginePeine de BartonAlex C Vasquez ANessuna valutazione finora
- Gestión de Riesgos - Obra Del Distrito de AmboDocumento61 pagineGestión de Riesgos - Obra Del Distrito de AmboFrancisco David Medrano RiveraNessuna valutazione finora
- Temp 0Documento1 paginaTemp 0Francisco David Medrano RiveraNessuna valutazione finora
- Temp 7Documento1 paginaTemp 7Francisco David Medrano RiveraNessuna valutazione finora
- Pacri Talavera Implementacion BM 24012019Documento99 paginePacri Talavera Implementacion BM 24012019Leonardo Puente CornejoNessuna valutazione finora
- Solucionario San Marcos 2019 II Ce - pdf371061956 PDFDocumento60 pagineSolucionario San Marcos 2019 II Ce - pdf371061956 PDFRaúlNessuna valutazione finora
- 2.3 Solucionario EFC - D - 2023-1Documento9 pagine2.3 Solucionario EFC - D - 2023-1Francisco David Medrano RiveraNessuna valutazione finora
- La 1Documento1 paginaLa 1Francisco David Medrano RiveraNessuna valutazione finora
- Dialnet ProblemasDeResistenciaDeMateriales 267957 PDFDocumento460 pagineDialnet ProblemasDeResistenciaDeMateriales 267957 PDFjohan100% (2)
- Ejemplos Pert CPMDocumento3 pagineEjemplos Pert CPMFrancisco David Medrano RiveraNessuna valutazione finora
- Mejoramiento camino Umari-fuentes aguaDocumento26 pagineMejoramiento camino Umari-fuentes aguaFrancisco David Medrano RiveraNessuna valutazione finora
- Upo D 2021 IiDocumento1 paginaUpo D 2021 IiFrancisco David Medrano RiveraNessuna valutazione finora
- Carga Axial 10Documento15 pagineCarga Axial 10Francisco David Medrano RiveraNessuna valutazione finora
- Plantilla MetradosDocumento2 paginePlantilla MetradosFrancisco David Medrano RiveraNessuna valutazione finora
- Transporte VesicularDocumento9 pagineTransporte VesicularkerenNessuna valutazione finora
- Efc B-ISR-28 06 21Documento1 paginaEfc B-ISR-28 06 21Francisco David Medrano RiveraNessuna valutazione finora
- Capitulo 2Documento7 pagineCapitulo 2Francisco David Medrano RiveraNessuna valutazione finora
- Solucionario 20101Documento133 pagineSolucionario 20101B̶e̶l̶e̶n̶ C̶u̶e̶v̶a̶ ̶p̶l̶a̶z̶a̶Nessuna valutazione finora
- Albañileria Confinado para Imprimir PDFDocumento14 pagineAlbañileria Confinado para Imprimir PDFEslym YeslinNessuna valutazione finora
- Problemas de Hidráulica SubterráneaDocumento9 pagineProblemas de Hidráulica SubterráneaFrancisco David Medrano RiveraNessuna valutazione finora
- Trabajo 2. Cables - Modo de CompatibilidadDocumento2 pagineTrabajo 2. Cables - Modo de CompatibilidadFrancisco David Medrano RiveraNessuna valutazione finora
- Ex. Final AbastosDocumento3 pagineEx. Final AbastosFrancisco David Medrano RiveraNessuna valutazione finora
- Mem Desc YauyopataDocumento6 pagineMem Desc YauyopataFrancisco David Medrano RiveraNessuna valutazione finora
- Rol de Exámenes Final y Susty 2020-2 (Ok)Documento4 pagineRol de Exámenes Final y Susty 2020-2 (Ok)Francisco David Medrano RiveraNessuna valutazione finora
- Costo Maquinaria y EquipoDocumento8 pagineCosto Maquinaria y EquipoVelazco Jairo0% (1)
- Rol de Exámenes Final y Susty 2020-2 (Ok)Documento4 pagineRol de Exámenes Final y Susty 2020-2 (Ok)Francisco David Medrano RiveraNessuna valutazione finora
- BiologiaDocumento45 pagineBiologiaSimone VisaNessuna valutazione finora
- Rol de Exámenes Final y Susty 2020-2 (Ok)Documento4 pagineRol de Exámenes Final y Susty 2020-2 (Ok)Francisco David Medrano RiveraNessuna valutazione finora
- 01 Libro Ii - BiologiaDocumento37 pagine01 Libro Ii - BiologiaFrancisco David Medrano RiveraNessuna valutazione finora
- Semana 9.coor Nodales ArmadurasDocumento5 pagineSemana 9.coor Nodales ArmadurasFrancisco David Medrano RiveraNessuna valutazione finora
- Semana 9 PDFDocumento7 pagineSemana 9 PDFFrancisco David Medrano RiveraNessuna valutazione finora
- QGIS 2.6 UserGuide EsDocumento737 pagineQGIS 2.6 UserGuide EsjoselosabeloNessuna valutazione finora
- Actividad 21 (Exponencial y Logarítmica) FMMP 012Documento2 pagineActividad 21 (Exponencial y Logarítmica) FMMP 012josepha acuñaNessuna valutazione finora
- Proyecto de Probabilidad, Importancia de Aprender Otro Idioma, Yordy y Jan CarlosDocumento23 pagineProyecto de Probabilidad, Importancia de Aprender Otro Idioma, Yordy y Jan CarlosYordy Rodolfo Delgado RosarioNessuna valutazione finora
- 1 - Org y Adm 1 TEORIADocumento71 pagine1 - Org y Adm 1 TEORIAmarcela aresNessuna valutazione finora
- Elaboración de Objetivos de ClaseDocumento11 pagineElaboración de Objetivos de ClaseClaudia MartosNessuna valutazione finora
- Reporte #1 Bacterias MesofilasDocumento29 pagineReporte #1 Bacterias MesofilasMiguel Salomon NegreteNessuna valutazione finora
- Presión, masa y volumen en fluidos estáticosDocumento4 paginePresión, masa y volumen en fluidos estáticosJuan AvqNessuna valutazione finora
- Evaluacion de La Personalidad IntroduccionDocumento17 pagineEvaluacion de La Personalidad IntroduccionCampos Gabriel Jorge50% (4)
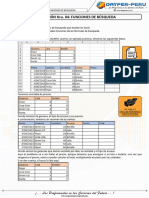
- S4 - Funciones de Búsqueda - MsepDocumento15 pagineS4 - Funciones de Búsqueda - Msepjhonmp220304Nessuna valutazione finora
- Manual de Usuario Tally 1125 PDFDocumento23 pagineManual de Usuario Tally 1125 PDFJosè Luis Chacón MoraNessuna valutazione finora
- Visión y misión IE José Faustino Sánchez CarriónDocumento4 pagineVisión y misión IE José Faustino Sánchez CarrióndanielaNessuna valutazione finora
- 01.-Memoria Descriptiva General ChuyaDocumento22 pagine01.-Memoria Descriptiva General ChuyaDanny CondeNessuna valutazione finora
- Manual InteractDocumento64 pagineManual InteractAriel Ricardo Albarracín100% (1)
- Practica de LaboratorioDocumento19 paginePractica de LaboratorioSabas Cubillo QuesadaNessuna valutazione finora
- Anhedonia MedicaDocumento15 pagineAnhedonia MedicaMisael Ortega SNessuna valutazione finora
- Cartas de Solicitud y Aceptacion de La ConsultoriaDocumento14 pagineCartas de Solicitud y Aceptacion de La ConsultoriaPaViNessuna valutazione finora
- TDR - Actualización de Costos Del Expediente Técnico AtapallpanDocumento6 pagineTDR - Actualización de Costos Del Expediente Técnico AtapallpanYuri Kevin Carhuas TapiaNessuna valutazione finora
- Deber 1Documento3 pagineDeber 1stevenNessuna valutazione finora
- Costo de Producción, Comercializacion y Rentabilidad de NaranjaDocumento194 pagineCosto de Producción, Comercializacion y Rentabilidad de NaranjarocioNessuna valutazione finora
- Lab 01 Ats OsciloscopioDocumento1 paginaLab 01 Ats OsciloscopioStiven Vidal Sucasaca PeredoNessuna valutazione finora
- Dirección Regional de Salud Piura TUPA 2010Documento54 pagineDirección Regional de Salud Piura TUPA 2010Luis Leopoldo Calle SalazarNessuna valutazione finora
- Fundamentación de La Carrera de Psicología PDFDocumento22 pagineFundamentación de La Carrera de Psicología PDFBajonero Mire100% (2)
- 7230-EXPERIENCIA DE APRENDIZAJE Nro 6 AGOSTO 9 AL 27 DE AGOSTO - CUARTO GRADO..Documento11 pagine7230-EXPERIENCIA DE APRENDIZAJE Nro 6 AGOSTO 9 AL 27 DE AGOSTO - CUARTO GRADO..Jenny Lily Martínez BuitrónNessuna valutazione finora
- Pruebas de Desgaste 1Documento3 paginePruebas de Desgaste 1José CerrónNessuna valutazione finora
- 1.1 Resumen EjecutivoDocumento4 pagine1.1 Resumen EjecutivoJaime Pacheco LauraNessuna valutazione finora
- 2.3 Definición Del Tipo de Investigación A Utilizar en Su EstudioDocumento13 pagine2.3 Definición Del Tipo de Investigación A Utilizar en Su Estudioderones13Nessuna valutazione finora
- La Enseñanza Unidad 1 DidacticaDocumento5 pagineLa Enseñanza Unidad 1 DidacticaSol FariasNessuna valutazione finora
- Sol Caso Practico Unidad 1Documento2 pagineSol Caso Practico Unidad 1raquel12333% (3)
- Exposicion Fundicion NodularDocumento9 pagineExposicion Fundicion NodularAzael Hernández PelcastreNessuna valutazione finora
- Actividad de Aprendizaje 16 Evidencia 3 Ficha Anyropologica y Test FisicoDocumento7 pagineActividad de Aprendizaje 16 Evidencia 3 Ficha Anyropologica y Test FisicoGeorgina FigueroaNessuna valutazione finora