Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Wishlist QuestionDocumento2 pagineWishlist QuestionRyan KatakhanNessuna valutazione finora
- ABB UnitrolDocumento12 pagineABB UnitrolRogério Ferro Do NascimentoNessuna valutazione finora
- Comparison For CTS and PtsDocumento6 pagineComparison For CTS and PtsPritam SinghNessuna valutazione finora
- SNO Project ItemDocumento9 pagineSNO Project ItemPritam SinghNessuna valutazione finora
- Enquiry For Manufacture, Testing & Supply of Generator Power and Auxiliary Transformers For Our Ongoing Three Projects in NepalDocumento7 pagineEnquiry For Manufacture, Testing & Supply of Generator Power and Auxiliary Transformers For Our Ongoing Three Projects in NepalPritam SinghNessuna valutazione finora
- Purchase OrderDocumento7 paginePurchase OrderRisa IchaNessuna valutazione finora
- Quotation (01.08.2016)Documento5 pagineQuotation (01.08.2016)Pritam SinghNessuna valutazione finora
- InfoDocumento1 paginaInfoCharles ChavesNessuna valutazione finora
- Item Description Unit Qty 1 Turbine & AuxiliariesDocumento4 pagineItem Description Unit Qty 1 Turbine & AuxiliariesPritam SinghNessuna valutazione finora
- Quotation (01.08.2016)Documento5 pagineQuotation (01.08.2016)Pritam SinghNessuna valutazione finora
- 3.3 Selection of Switchyard Equipment For SHPDocumento99 pagine3.3 Selection of Switchyard Equipment For SHPKrishna Mohan Sharma100% (1)
- 1.0 Cover - PageDocumento2 pagine1.0 Cover - PageKoushik DeyNessuna valutazione finora
- Canada Micro Hydro GuideDocumento56 pagineCanada Micro Hydro Guidenavinchopra1986100% (5)
- FM BoosterDocumento1 paginaFM BoostermallipeddijNessuna valutazione finora
- Upst100-Gtp 10Documento2 pagineUpst100-Gtp 10Pritam SinghNessuna valutazione finora
- Sr. No. Item Description MakeDocumento10 pagineSr. No. Item Description MakePritam SinghNessuna valutazione finora
- IndexDocumento1 paginaIndexPritam SinghNessuna valutazione finora
- IndexDocumento1 paginaIndexPritam SinghNessuna valutazione finora
- Electrical SampleDocumento2 pagineElectrical SamplePritam SinghNessuna valutazione finora
- SF Gas Insulated Ring Main Unit RMUDocumento24 pagineSF Gas Insulated Ring Main Unit RMUr_mukuyuNessuna valutazione finora
- I El 217Documento74 pagineI El 217selvamuthukumarNessuna valutazione finora
- General Specification For Ring Main Unit Switchgear, From 3.3 To 13.8 KVDocumento9 pagineGeneral Specification For Ring Main Unit Switchgear, From 3.3 To 13.8 KVPritam SinghNessuna valutazione finora
- Star Artts PDFDocumento16 pagineStar Artts PDFTony FahmyNessuna valutazione finora
- Generation Voltage 6.6 KV Generator Capacity 2500 KW Genrator Current 257.2938 AMP at 95% Voltage 270.8355Documento1 paginaGeneration Voltage 6.6 KV Generator Capacity 2500 KW Genrator Current 257.2938 AMP at 95% Voltage 270.8355Pritam SinghNessuna valutazione finora
- LA SpecsDocumento2 pagineLA SpecsPritam SinghNessuna valutazione finora
- FM BoosterDocumento1 paginaFM BoostermallipeddijNessuna valutazione finora
- Voltage Regulator DECS-100 ManuelDocumento81 pagineVoltage Regulator DECS-100 Manuelctsak100% (1)
- LA SpecsDocumento2 pagineLA SpecsPritam SinghNessuna valutazione finora
- Decs 250 PDFDocumento350 pagineDecs 250 PDFPritam SinghNessuna valutazione finora
- Avc63 12 PDFDocumento4 pagineAvc63 12 PDFZinou ZizouNessuna valutazione finora
- NSK BearingDocumento138 pagineNSK BearingPritam SinghNessuna valutazione finora
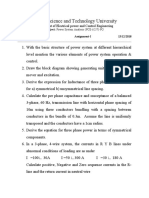
- Adama Science and Technology University: Department of Electrical Power and Control EngineeringDocumento2 pagineAdama Science and Technology University: Department of Electrical Power and Control EngineeringOkezaki TemoyoNessuna valutazione finora
- Instalación Opera en Win7Documento12 pagineInstalación Opera en Win7pedro_orozco_80Nessuna valutazione finora
- CCIE Data Center Storage Networking Hardware ArchitectureDocumento4 pagineCCIE Data Center Storage Networking Hardware Architectureradi permanaNessuna valutazione finora
- Coordinating Parallel Hierarchical Storage ManagemDocumento16 pagineCoordinating Parallel Hierarchical Storage ManagemAdane AbateNessuna valutazione finora
- ICT 373 Chapter 1 - IntroDocumento31 pagineICT 373 Chapter 1 - IntroKelvin David MarshNessuna valutazione finora
- (IJCST-V8I5P3) : Gajendra R. WaniDocumento4 pagine(IJCST-V8I5P3) : Gajendra R. WaniEighthSenseGroupNessuna valutazione finora
- Chapter 5 PPT (AIS - James Hall)Documento10 pagineChapter 5 PPT (AIS - James Hall)Nur-aima Mortaba50% (2)
- CM and Agile Executive Summary PDFDocumento13 pagineCM and Agile Executive Summary PDFRomán Victor ChavezNessuna valutazione finora
- Digital Logic Design Final ExamDocumento12 pagineDigital Logic Design Final Examamanuel abrehaNessuna valutazione finora
- Beti̇m Investment Project SummaryDocumento24 pagineBeti̇m Investment Project SummaryZeynel OzkayaNessuna valutazione finora
- NVCC - CUDA Toolkit DocumentationDocumento1 paginaNVCC - CUDA Toolkit DocumentationBan JelacicjNessuna valutazione finora
- Aircon Brochure PDFDocumento6 pagineAircon Brochure PDFhhhhhhhhaaNessuna valutazione finora
- ATV320 Getting Started EN NVE21763 02Documento4 pagineATV320 Getting Started EN NVE21763 02Berkah Jaya PanelNessuna valutazione finora
- ABS960 Brochure 1113Documento4 pagineABS960 Brochure 1113hendryNessuna valutazione finora
- Implementation - Changeover MethodsDocumento1 paginaImplementation - Changeover MethodsLarona SitangNessuna valutazione finora
- Airflow Chapter2Documento35 pagineAirflow Chapter2massywebNessuna valutazione finora
- Ergonomics Research Papers PDFDocumento2 pagineErgonomics Research Papers PDFChris0% (1)
- Breakout Box Owners Manual 3DDocumento7 pagineBreakout Box Owners Manual 3Dcacampbell3Nessuna valutazione finora
- Dissertation Adoption of Enterprise Resource Planning Erp in VietnamDocumento30 pagineDissertation Adoption of Enterprise Resource Planning Erp in VietnamAr Puneet AroraNessuna valutazione finora
- Arnold Schwarzenegger - The New Encyclopedia of ... - ScribdDocumento1 paginaArnold Schwarzenegger - The New Encyclopedia of ... - ScribdvklNessuna valutazione finora
- Single Data Sheet Linear Luminaire With LED GRP - 6402-4128-6100-152-1110-11-8500 - 267040 - en-GBDocumento6 pagineSingle Data Sheet Linear Luminaire With LED GRP - 6402-4128-6100-152-1110-11-8500 - 267040 - en-GBAlla Naveen KumarNessuna valutazione finora
- Integrated Logistics Management - An Opportunity For Met A HeuristicsDocumento27 pagineIntegrated Logistics Management - An Opportunity For Met A HeuristicsRai Waqas Azfar KhanNessuna valutazione finora
- Cryptographic Accelerator in Reconfigurable HardwareDocumento8 pagineCryptographic Accelerator in Reconfigurable HardwareDaniel Andrés CrespoNessuna valutazione finora
- Full Download Test Bank For Technology in Action Complete 16th Edition Evans PDF Full ChapterDocumento35 pagineFull Download Test Bank For Technology in Action Complete 16th Edition Evans PDF Full Chaptertannery.eurusp0p2b6100% (20)
- CBH-22-167 Din 7985 Pan Combi MS M6 X 16 BZP 4.6Documento1 paginaCBH-22-167 Din 7985 Pan Combi MS M6 X 16 BZP 4.6qualityNessuna valutazione finora
- Automotive EngineeringDocumento4 pagineAutomotive EngineeringIrinaNessuna valutazione finora
- Complete PowerlineDocumento164 pagineComplete PowerlineHarshal AmbatkarNessuna valutazione finora
- MN603-Wireless Network and Security: Assignment 1ADocumento5 pagineMN603-Wireless Network and Security: Assignment 1AakhilNessuna valutazione finora