Potrebbero piacerti anche
- Easy(er) Electrical Principles for Extra Class Ham License (2012-2016)Da EverandEasy(er) Electrical Principles for Extra Class Ham License (2012-2016)Nessuna valutazione finora
- Wavelet Based ECG Signal De-Noising: AbstractDocumento5 pagineWavelet Based ECG Signal De-Noising: AbstractPushpek SinghNessuna valutazione finora
- Learn Amateur Radio Electronics on Your SmartphoneDa EverandLearn Amateur Radio Electronics on Your SmartphoneNessuna valutazione finora
- Noise Analysis and Different Denoising Techniques of ECG Signal - A SurveyDocumento5 pagineNoise Analysis and Different Denoising Techniques of ECG Signal - A SurveyMona NaiduNessuna valutazione finora
- Amateur Radio Electronics on Your MobileDa EverandAmateur Radio Electronics on Your MobileValutazione: 5 su 5 stelle5/5 (1)
- Semiconductor Detector Systems Chapter-1 PDFDocumento42 pagineSemiconductor Detector Systems Chapter-1 PDFHaiderNessuna valutazione finora
- ECG Signal Feature Extraction Using Wavelet Transforms: Ruqaiya Khanam, Ranjana Prasad, Vinay AroraDocumento4 pagineECG Signal Feature Extraction Using Wavelet Transforms: Ruqaiya Khanam, Ranjana Prasad, Vinay AroraPriyadarshy KumarNessuna valutazione finora
- Advances in QRS Detection: Modified Wavelet Energy Gradient MethodDocumento7 pagineAdvances in QRS Detection: Modified Wavelet Energy Gradient MethodInternational Journal of Emerging Trends in Signal Processing (IJETSP)Nessuna valutazione finora
- Ijett V3i2p204Documento3 pagineIjett V3i2p204surendiran123Nessuna valutazione finora
- EMG Analysis PDFDocumento9 pagineEMG Analysis PDFlazarosNessuna valutazione finora
- Mkm1133 Instrumentation and Control SystemDocumento19 pagineMkm1133 Instrumentation and Control SystemNurul Nadia Mohd ZawawiNessuna valutazione finora
- Design ECG AmplifierDocumento9 pagineDesign ECG Amplifierm_wssNessuna valutazione finora
- T 7.2.1.1 Multiplicación de FrecuenciaDocumento40 pagineT 7.2.1.1 Multiplicación de FrecuenciaBlademir Parra GayosoNessuna valutazione finora
- Final Review DSPDocumento17 pagineFinal Review DSPKota Krishna DheerajNessuna valutazione finora
- Analysis of Various Filter Configurations On Noise Reduction in ECG WaveformDocumento4 pagineAnalysis of Various Filter Configurations On Noise Reduction in ECG WaveformKanwal SaleemNessuna valutazione finora
- ECG Filter Draft AbstractDocumento2 pagineECG Filter Draft AbstractRahul MvrNessuna valutazione finora
- Removal of Baseline Wander and Power LineDocumento6 pagineRemoval of Baseline Wander and Power LineBhaskar MohanNessuna valutazione finora
- Noise Removal From ECG Signal by Thresholding With Comparing Different Types of WaveletDocumento7 pagineNoise Removal From ECG Signal by Thresholding With Comparing Different Types of WaveletInternational Journal of Application or Innovation in Engineering & ManagementNessuna valutazione finora
- Complex Engineering ProblemDocumento6 pagineComplex Engineering ProblemtalhaNessuna valutazione finora
- Automation of ECG Heart Beat Detection Using Morphological Filtering and Daubechies Wavelet TransformDocumento6 pagineAutomation of ECG Heart Beat Detection Using Morphological Filtering and Daubechies Wavelet TransformIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNessuna valutazione finora
- Accepted ManuscriptDocumento18 pagineAccepted ManuscriptDorothy ManriqueNessuna valutazione finora
- ECG Circuit Analysis and Design Engineers LabsDocumento29 pagineECG Circuit Analysis and Design Engineers LabsDebasish HalderNessuna valutazione finora
- A Project Report ON Ecg Signal Denoisig Using Wavelet TransformDocumento58 pagineA Project Report ON Ecg Signal Denoisig Using Wavelet Transformnaali pavanNessuna valutazione finora
- UNIT-3: 1. Draw The Block Schematic of AF Wave Analyzer and Explain Its Principle and Working? AnsDocumento17 pagineUNIT-3: 1. Draw The Block Schematic of AF Wave Analyzer and Explain Its Principle and Working? AnsriyazpashaNessuna valutazione finora
- Design and Simulation of Electrocardiogram CircuitDocumento19 pagineDesign and Simulation of Electrocardiogram Circuitlopohi2934Nessuna valutazione finora
- PulsesDocumento4 paginePulsesshaniNessuna valutazione finora
- Processor Setting FundamentalsDocumento14 pagineProcessor Setting Fundamentalsta dang hung100% (1)
- Sensor SAmpling FrequencyDocumento7 pagineSensor SAmpling Frequencypradeep324Nessuna valutazione finora
- Signal AnalyzersDocumento6 pagineSignal Analyzersnarendra.pathakNessuna valutazione finora
- Unit-III (Topic - 4)Documento39 pagineUnit-III (Topic - 4)vsresika20Nessuna valutazione finora
- Electrocardiogram (Ecg) : Indian Institute of Technology HyderabadDocumento11 pagineElectrocardiogram (Ecg) : Indian Institute of Technology HyderabadperumalvigneshNessuna valutazione finora
- ECGDocumento11 pagineECGYawar AlmatNessuna valutazione finora
- Instrumentationamplifier ECGDocumento35 pagineInstrumentationamplifier ECGRoiNessuna valutazione finora
- UNIT-3: AF Wave AnalyzerDocumento18 pagineUNIT-3: AF Wave AnalyzerbijalmehtaNessuna valutazione finora
- ElectrocardiogramDocumento11 pagineElectrocardiogramMehaboob RahmanNessuna valutazione finora
- Medical Applications of DSP: Made By-Digisha Singhal 13bec026 Kinjal Aggrawal 13bec054 Guided by - Dr. Mehul NaikDocumento16 pagineMedical Applications of DSP: Made By-Digisha Singhal 13bec026 Kinjal Aggrawal 13bec054 Guided by - Dr. Mehul NaikPriyank KeniNessuna valutazione finora
- Ecg Feature Extraction MethodsDocumento5 pagineEcg Feature Extraction MethodsBruno LeppeNessuna valutazione finora
- The Phase Sensitive (Lock-In) DetectorDocumento21 pagineThe Phase Sensitive (Lock-In) DetectorBert ColijnNessuna valutazione finora
- 1 Sensor FundamentalsDocumento34 pagine1 Sensor Fundamentalshmr4everNessuna valutazione finora
- Index Terms: OutlinesDocumento19 pagineIndex Terms: OutlinesAbu Bakr M. SaeedNessuna valutazione finora
- Robust Nonlinear Aggregation Operator For ECG Powerline Interference ReductionDocumento8 pagineRobust Nonlinear Aggregation Operator For ECG Powerline Interference ReductionSparsh KachhadiaNessuna valutazione finora
- Improved Spectrogram Analysis For ECG Signal in Emergency Medical ApplicationsDocumento6 pagineImproved Spectrogram Analysis For ECG Signal in Emergency Medical ApplicationsEditor IJACSANessuna valutazione finora
- What Is A FilterDocumento23 pagineWhat Is A FilterEng MakwebaNessuna valutazione finora
- Oscillators: IntroductionDocumento9 pagineOscillators: IntroductionCherryl Mae AlmojuelaNessuna valutazione finora
- Mis 13Documento1 paginaMis 13api-3761679Nessuna valutazione finora
- In-Depth Analysis of Cardiac Signals Using Novel Equipment and SoftwareDocumento6 pagineIn-Depth Analysis of Cardiac Signals Using Novel Equipment and SoftwareHoracio DorantesNessuna valutazione finora
- School of Electronics Engineering: Project Report OnDocumento10 pagineSchool of Electronics Engineering: Project Report OnvamshiNessuna valutazione finora
- Heart Arrhythmia Detection and Its Analysis Using Matlab IJERTV10IS110176Documento5 pagineHeart Arrhythmia Detection and Its Analysis Using Matlab IJERTV10IS110176EBXC 7S13Nessuna valutazione finora
- 225 Lock-In Amplifier: 225.02 Bentham Instruments LTDDocumento12 pagine225 Lock-In Amplifier: 225.02 Bentham Instruments LTDMitchell Guy KenneyNessuna valutazione finora
- Spectrum Analysis and The Frequency DomainDocumento16 pagineSpectrum Analysis and The Frequency DomainAhsan AmeenNessuna valutazione finora
- Fig: Dual Beam CRO With Separate Time BasesDocumento27 pagineFig: Dual Beam CRO With Separate Time BasesYashaswiniNessuna valutazione finora
- Combination of All ChaptersDocumento34 pagineCombination of All ChaptersLinus AntonioNessuna valutazione finora
- Blind Paper SpineDocumento5 pagineBlind Paper SpineJoao PauloNessuna valutazione finora
- Exercise 6 (Discussion-Conclusion)Documento4 pagineExercise 6 (Discussion-Conclusion)Neil JanasNessuna valutazione finora
- This Report About Low Pass FilterDocumento4 pagineThis Report About Low Pass Filterahmad abubakr sdiqNessuna valutazione finora
- A Novel Method of QRS Detection Using Adaptive Multilevel Thresholding With Statistical False Peak EliminationDocumento10 pagineA Novel Method of QRS Detection Using Adaptive Multilevel Thresholding With Statistical False Peak EliminationIJRASETPublicationsNessuna valutazione finora
- VSWR-TA-E&M Tilt-Modulation-RSSI-DCRDocumento34 pagineVSWR-TA-E&M Tilt-Modulation-RSSI-DCRChaudary Imran100% (1)
- Pre-Lab Assignment: Read and Review Sections 2.4, 2.8.2, 9.9.3, 13.4, 13.5, and 13.9 inDocumento11 paginePre-Lab Assignment: Read and Review Sections 2.4, 2.8.2, 9.9.3, 13.4, 13.5, and 13.9 inThe_Dude1138Nessuna valutazione finora
- ISSN 1392-1215 Pulse Sensor of Physiological Parameter Monitoring System 2007 V78 P 67-70Documento4 pagineISSN 1392-1215 Pulse Sensor of Physiological Parameter Monitoring System 2007 V78 P 67-70Himanshu DixitNessuna valutazione finora
- Development of FiltersDocumento15 pagineDevelopment of FiltersWilson Chan0% (1)
- 2.-Microsystem Design FundamentalsDocumento28 pagine2.-Microsystem Design FundamentalsAlexander Martínez PasekNessuna valutazione finora
- 1.-Introduction To Microsystem Fabrication and IntegrationDocumento44 pagine1.-Introduction To Microsystem Fabrication and IntegrationAlexander Martínez PasekNessuna valutazione finora
- 3.2.-OEMS - Displays and Optical CommunicationsDocumento31 pagine3.2.-OEMS - Displays and Optical CommunicationsAlexander Martínez PasekNessuna valutazione finora
- 3.1.-OEMS - Micromirror Technology and Scanning ApplicationsDocumento36 pagine3.1.-OEMS - Micromirror Technology and Scanning ApplicationsAlexander Martínez PasekNessuna valutazione finora
- SMT32F407xx System Block DiagramDocumento1 paginaSMT32F407xx System Block DiagramAlexander Martínez PasekNessuna valutazione finora
- Unusual Filter CktsDocumento46 pagineUnusual Filter Cktsraineymj100% (1)
- STM32F40Xxx PDFDocumento202 pagineSTM32F40Xxx PDFLorisBruzziNessuna valutazione finora
- En DM00039084 PDFDocumento34 pagineEn DM00039084 PDFHưng NgôNessuna valutazione finora
- 02.-Sequence Analysis PDFDocumento14 pagine02.-Sequence Analysis PDFAlexander Martínez PasekNessuna valutazione finora
- 01.-Databases and Sequence RetrievalDocumento8 pagine01.-Databases and Sequence RetrievalAlexander Martínez PasekNessuna valutazione finora
- MFOLD TutorialDocumento12 pagineMFOLD TutorialAlexander Martínez PasekNessuna valutazione finora
- 09.-Superresolution MicrosDocumento6 pagine09.-Superresolution MicrosAlexander Martínez PasekNessuna valutazione finora
- 03.-Pulse Oximetry NotesDocumento8 pagine03.-Pulse Oximetry NotesAlexander Martínez PasekNessuna valutazione finora
- Tracer Based SensingDocumento5 pagineTracer Based SensingAlexander Martínez PasekNessuna valutazione finora
- Genome AnalysisDocumento108 pagineGenome AnalysisAlexander Martínez PasekNessuna valutazione finora
- ECG Made Easy - J HamptonDocumento78 pagineECG Made Easy - J Hamptonkabal321100% (1)
- Electrical Axis and Axis Deviation: Mean Qrs Axis: DefinitionDocumento9 pagineElectrical Axis and Axis Deviation: Mean Qrs Axis: Definitionrocker_jadulNessuna valutazione finora
- Heart Disease Prediction Using Integer-Coded Genetic Algorithm (ICGA) Based Particle Clonal Neural Network (ICGA-PCNN)Documento5 pagineHeart Disease Prediction Using Integer-Coded Genetic Algorithm (ICGA) Based Particle Clonal Neural Network (ICGA-PCNN)BONFRINGNessuna valutazione finora
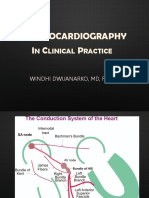
- Pugazhendhi Vijayaraman Cardiac Conduction SystemDocumento30 paginePugazhendhi Vijayaraman Cardiac Conduction SystemMariaVirginiaNessuna valutazione finora
- ECG For ACLS ModifiedDocumento48 pagineECG For ACLS ModifiedIamnurse Nylej100% (1)
- Electrocardiography - Wikipedia, The Free EncyclopediaDocumento18 pagineElectrocardiography - Wikipedia, The Free Encyclopediapayments8543Nessuna valutazione finora
- ECG NotesDocumento8 pagineECG NotesPeer TutorNessuna valutazione finora
- Electrocardiography I C P: N Linical RacticeDocumento57 pagineElectrocardiography I C P: N Linical RacticewidyamarisNessuna valutazione finora
- EKG Cheat Sheet - Henry Del RosarioDocumento1 paginaEKG Cheat Sheet - Henry Del RosarioanwarNessuna valutazione finora
- Cardiac VectorDocumento14 pagineCardiac Vectorswastik baratNessuna valutazione finora
- ECG Notes - 1 PDFDocumento78 pagineECG Notes - 1 PDFAzizan HannyNessuna valutazione finora
- Electrocardiographs, Multichannel Interpretive: Scope of This Product ComparisonDocumento83 pagineElectrocardiographs, Multichannel Interpretive: Scope of This Product ComparisonchanlalNessuna valutazione finora
- Vectorial Analysis of Ecg: Learning ObjectivesDocumento8 pagineVectorial Analysis of Ecg: Learning ObjectivesMukesh GuptaNessuna valutazione finora
- Nurses ECG - 1Documento72 pagineNurses ECG - 1Aswini Kumar SNessuna valutazione finora
- Measurement of Heart RateDocumento2 pagineMeasurement of Heart RatePulkit SharmaNessuna valutazione finora
- ECG Monitoring in TheatreDocumento17 pagineECG Monitoring in TheatrePhani NadellaNessuna valutazione finora
- An ECG Intelligent Monitoring System With MSP430 MicrocontrollerDocumento6 pagineAn ECG Intelligent Monitoring System With MSP430 MicrocontrollerArash MinNessuna valutazione finora
- The Easy R's EKG Interpretation FinalDocumento9 pagineThe Easy R's EKG Interpretation FinalMatar PaneerNessuna valutazione finora
- MANUAL DE OPERACION EKG Ecg600gDocumento43 pagineMANUAL DE OPERACION EKG Ecg600gMárquez RossendoNessuna valutazione finora
- EKG Crash Course NuRsing 390 SMC - 4Documento57 pagineEKG Crash Course NuRsing 390 SMC - 4m1k0e100% (2)
- ECG Lecture 4Documento44 pagineECG Lecture 4asdasdasdasNessuna valutazione finora
- Cardiac Pathologies PDFDocumento5 pagineCardiac Pathologies PDFLejla AkšamovićNessuna valutazione finora
- 2000 Pictures For MRCP Part-2 Written by Sarowar HossainDocumento102 pagine2000 Pictures For MRCP Part-2 Written by Sarowar HossainLeila91% (11)
- 12SL Statement of Validation and AccuracyDocumento26 pagine12SL Statement of Validation and Accuracycygnus8929Nessuna valutazione finora
- Sinus Rhythm DisturbancesDocumento3 pagineSinus Rhythm DisturbancesMarcus Philip GonzalesNessuna valutazione finora
- Worksheet Abnormal ECGDocumento4 pagineWorksheet Abnormal ECGKarthik SNessuna valutazione finora
- Kuliah Ekg UnswagatiDocumento75 pagineKuliah Ekg UnswagatiiikNessuna valutazione finora
- Ecg Made EasyDocumento45 pagineEcg Made EasyMohammed T. Abdul RazakNessuna valutazione finora
- Left Bundle Branch Block - UpToDateDocumento25 pagineLeft Bundle Branch Block - UpToDateKrull TTTeamNessuna valutazione finora