Potrebbero piacerti anche
- SC ViscoplasticDocumento20 pagineSC ViscoplasticTarkes DoraNessuna valutazione finora
- International Journal of Solids and Structures: Jean-Marc Pipard, Tudor Balan, Farid Abed-Meraim, Xavier LemoineDocumento10 pagineInternational Journal of Solids and Structures: Jean-Marc Pipard, Tudor Balan, Farid Abed-Meraim, Xavier LemoineChiheb BaNessuna valutazione finora
- Chemical Engineering Science: Q.J. Zheng, A.B. YuDocumento9 pagineChemical Engineering Science: Q.J. Zheng, A.B. Yumaior64Nessuna valutazione finora
- Prediction of Anisotropic Elastoplastic Instability With Rice's Criterion in Plane CompressionDocumento16 paginePrediction of Anisotropic Elastoplastic Instability With Rice's Criterion in Plane CompressionKrunal MoreyNessuna valutazione finora
- Jafar I 2016Documento16 pagineJafar I 2016prasad joshiNessuna valutazione finora
- Mechanical Engineering Journal Mechanical Engineering JournalDocumento15 pagineMechanical Engineering Journal Mechanical Engineering Journaltone_n_tuneNessuna valutazione finora
- International Journal of Solids and StructuresDocumento25 pagineInternational Journal of Solids and StructuresFuhui ShenNessuna valutazione finora
- Accepted Manuscript: 10.1016/j.euromechsol.2018.04.011Documento35 pagineAccepted Manuscript: 10.1016/j.euromechsol.2018.04.011idrissNessuna valutazione finora
- P19PakJofScion27 09 2013Documento12 pagineP19PakJofScion27 09 2013Saba GheniNessuna valutazione finora
- Mechanics of Materials: Reza Mehrabi, Masood Taheri Andani, Mohammad Elahinia, Mahmoud KadkhodaeiDocumento15 pagineMechanics of Materials: Reza Mehrabi, Masood Taheri Andani, Mohammad Elahinia, Mahmoud KadkhodaeiMudavath Babu RamNessuna valutazione finora
- Determination of Natural Frequency of Euler's Beams Using Analytical and Finite Element MethodDocumento75 pagineDetermination of Natural Frequency of Euler's Beams Using Analytical and Finite Element MethodAnonymous oYSrguZNessuna valutazione finora
- Axially Symmetric Vibrations in Poroelastic Solid Cylindrical Panel Resting On Elastic FoundationDocumento8 pagineAxially Symmetric Vibrations in Poroelastic Solid Cylindrical Panel Resting On Elastic FoundationNanda KumarNessuna valutazione finora
- European Journal of Mechanics A/Solids: Binglei Wang, Shenjie Zhou, Junfeng Zhao, Xi ChenDocumento8 pagineEuropean Journal of Mechanics A/Solids: Binglei Wang, Shenjie Zhou, Junfeng Zhao, Xi ChenVarun JainNessuna valutazione finora
- 1 s2.0 S0997753812001143 MainDocumento8 pagine1 s2.0 S0997753812001143 MainhhedfiNessuna valutazione finora
- J Jmps 2017 06 017Documento29 pagineJ Jmps 2017 06 017Fattah Maulana AlanNessuna valutazione finora
- On The Characterization of The Elastic Properties of Asymmetric-Ghadyani2016Documento7 pagineOn The Characterization of The Elastic Properties of Asymmetric-Ghadyani2016KASPER3Nessuna valutazione finora
- ΑΣΚΗΣΗ 2 - 1-s2.0-S0020768314000213-mainDocumento8 pagineΑΣΚΗΣΗ 2 - 1-s2.0-S0020768314000213-mainspartakidNessuna valutazione finora
- Sensors: Modelling The Size Effects On The Mechanical Properties of Micro/Nano StructuresDocumento20 pagineSensors: Modelling The Size Effects On The Mechanical Properties of Micro/Nano StructuresGopal SawantNessuna valutazione finora
- Journal of Rock Mechanics and Geotechnical Engineering: Mojtaba AsadiDocumento7 pagineJournal of Rock Mechanics and Geotechnical Engineering: Mojtaba Asadiwawan aries sandiNessuna valutazione finora
- Vigliotti.2001.Linear Multiscale Analysis and Finite Element Validation of Stretching and Bending Dominated Lattice MaterialsDocumento30 pagineVigliotti.2001.Linear Multiscale Analysis and Finite Element Validation of Stretching and Bending Dominated Lattice Materialsticonzero2010Nessuna valutazione finora
- Liu 2019Documento17 pagineLiu 2019ChristopherElPadrinoCardenasNessuna valutazione finora
- International Journal of Mechanical Sciences: M.R. Karamooz Ravari, M. Kadkhodaei, M. Badrossamay, R. RezaeiDocumento8 pagineInternational Journal of Mechanical Sciences: M.R. Karamooz Ravari, M. Kadkhodaei, M. Badrossamay, R. RezaeiGunaseelanMurugesanNessuna valutazione finora
- Magneto-Mechanical Characterization of Magnetorheological ElastomersDocumento10 pagineMagneto-Mechanical Characterization of Magnetorheological ElastomersNam Huu TranNessuna valutazione finora
- Particuology: Hongyuan Sun, Huaqing Ma, Yongzhi ZhaoDocumento15 pagineParticuology: Hongyuan Sun, Huaqing Ma, Yongzhi Zhaoyellowish123Nessuna valutazione finora
- Extracting Static Elastic Moduli of Rock Through Elastic Wave VelocitiesDocumento17 pagineExtracting Static Elastic Moduli of Rock Through Elastic Wave VelocitiesAxel DorianNessuna valutazione finora
- Bayesian Estimation For Probability Distribution of Rock's Elastic Modulus Based On Compression Wave Velocity and Deformation Warning For Large Underground CavernDocumento19 pagineBayesian Estimation For Probability Distribution of Rock's Elastic Modulus Based On Compression Wave Velocity and Deformation Warning For Large Underground CavernJane AlhambraNessuna valutazione finora
- 2009 ThuillierDocumento19 pagine2009 ThuillierAnis SuissiNessuna valutazione finora
- Spherical-Tip Indentation of Viscoelastic Material: L. Cheng, X. Xia, L.E. Scriven, W.W. GerberichDocumento14 pagineSpherical-Tip Indentation of Viscoelastic Material: L. Cheng, X. Xia, L.E. Scriven, W.W. Gerberichtantai2004Nessuna valutazione finora
- 1 s2.0 S0168874X13001637 Main PDFDocumento18 pagine1 s2.0 S0168874X13001637 Main PDFDrSn PadhiNessuna valutazione finora
- Prediction of Rock Mechanical Parameters For Hydrocarbon Reservoirs Using Different Artificial Intelligence TechniquesDocumento11 paginePrediction of Rock Mechanical Parameters For Hydrocarbon Reservoirs Using Different Artificial Intelligence TechniquesfelipeNessuna valutazione finora
- International Journal of Fatigue: M. Abo-Elkhier, A.A. Hamada, A. Bahei El-DeenDocumento8 pagineInternational Journal of Fatigue: M. Abo-Elkhier, A.A. Hamada, A. Bahei El-DeenHernando ZambranoNessuna valutazione finora
- Transport Property Measurements in Sheared Granular FlowsDocumento13 pagineTransport Property Measurements in Sheared Granular FlowsRLNessuna valutazione finora
- Dynamic Stability of Axially Accelerating TimoshenDocumento11 pagineDynamic Stability of Axially Accelerating TimoshencelsoNessuna valutazione finora
- Xiong 2019Documento13 pagineXiong 2019Sam JacorNessuna valutazione finora
- Coupled-Volume Multi-Scale Modelling of Quasi-Brittle MaterialDocumento26 pagineCoupled-Volume Multi-Scale Modelling of Quasi-Brittle MaterialElena EfthymiadiNessuna valutazione finora
- Measurements of Viscoelastic Functions of Polymers in The Frequency-Domain Using NanoindentationDocumento20 pagineMeasurements of Viscoelastic Functions of Polymers in The Frequency-Domain Using NanoindentationdavidemeulliNessuna valutazione finora
- Zhang2014 PDFDocumento18 pagineZhang2014 PDFmekyno32Nessuna valutazione finora
- Mechanics Composite MaterialsDocumento47 pagineMechanics Composite MaterialsThomas MouraNessuna valutazione finora
- J Jmps 2005 03 009Documento27 pagineJ Jmps 2005 03 009mohammad hosein benvidiNessuna valutazione finora
- Dynamic Stability of Axially Accelerating TimoshenkoDocumento11 pagineDynamic Stability of Axially Accelerating TimoshenkonelsonhugoNessuna valutazione finora
- 041 - A. Lunt - Full In-Plane Strain Tensor Analysis Using The Microscale Ring-Core FIB Milling and DIC ApproachDocumento21 pagine041 - A. Lunt - Full In-Plane Strain Tensor Analysis Using The Microscale Ring-Core FIB Milling and DIC ApproachMartin HellNessuna valutazione finora
- GiotGiraudHomandGGE 2006Documento30 pagineGiotGiraudHomandGGE 2006amir iranmaneshNessuna valutazione finora
- Biaxial Experimental Characterizations of Soft Polymers A ReviewDocumento28 pagineBiaxial Experimental Characterizations of Soft Polymers A ReviewbazookavnitNessuna valutazione finora
- Arul 2011 ADocumento20 pagineArul 2011 AmarulkrNessuna valutazione finora
- A Semianalytical Solution For Free Vibration AnalyDocumento19 pagineA Semianalytical Solution For Free Vibration AnalyVPN NetworkNessuna valutazione finora
- Variational Asymptotic Method For Unit Cell Homogenizationof Periodically Heterogeneous MaterialsDocumento18 pagineVariational Asymptotic Method For Unit Cell Homogenizationof Periodically Heterogeneous MaterialsbiluvarNessuna valutazione finora
- Prediction of The Effective Elastic ModuDocumento9 paginePrediction of The Effective Elastic ModuAxel DorianNessuna valutazione finora
- 1 s2.0 S0022509616305622 MainDocumento19 pagine1 s2.0 S0022509616305622 MainSwetaSinhaNessuna valutazione finora
- Journal of The Mechanics and Physics of Solids: Noureddine Damil, Michel Potier-FerryDocumento15 pagineJournal of The Mechanics and Physics of Solids: Noureddine Damil, Michel Potier-FerryBoumediene BakhaddaNessuna valutazione finora
- BMG Gao2006Documento18 pagineBMG Gao2006Amina DinariNessuna valutazione finora
- Size-Dependent Elastic Properties of A Single-Walled Carbon Nanotube Via A Molecular Mechanics Model Chang and Gao 2003 PDFDocumento16 pagineSize-Dependent Elastic Properties of A Single-Walled Carbon Nanotube Via A Molecular Mechanics Model Chang and Gao 2003 PDFKishore Guru-MENessuna valutazione finora
- 1 s2.0 S0020740316308189 MainDocumento24 pagine1 s2.0 S0020740316308189 Mainnadeemq_0786Nessuna valutazione finora
- J Mineng 2010 07 011Documento7 pagineJ Mineng 2010 07 011AlbertoNessuna valutazione finora
- Prediction of Strength and Deformability of An Interlocked Blocky Rock Mass Using UDEC - Y M AlshkaneDocumento12 paginePrediction of Strength and Deformability of An Interlocked Blocky Rock Mass Using UDEC - Y M AlshkaneemrahNessuna valutazione finora
- Artigo - Characterisation of Slip and Twin Activity Using Digital ImageDocumento16 pagineArtigo - Characterisation of Slip and Twin Activity Using Digital ImageMárcio PachecoNessuna valutazione finora
- AissaniDocumento21 pagineAissaniHakim KaciNessuna valutazione finora
- Grain Refinement and Strain Hardening in If Steel During MULTIAXIAL COMPRESSIONDocumento9 pagineGrain Refinement and Strain Hardening in If Steel During MULTIAXIAL COMPRESSIONJoselo HRNessuna valutazione finora
- Exploring Buckling and Post-Buckling Behavior of Incompressible Hyperelastic Beams Through Innovative Experimental and Computational ApproachesDocumento21 pagineExploring Buckling and Post-Buckling Behavior of Incompressible Hyperelastic Beams Through Innovative Experimental and Computational ApproachesGogyNessuna valutazione finora
- 1 s2.0 S0263822322005530 MainDocumento14 pagine1 s2.0 S0263822322005530 MainAbdelali YacoubiNessuna valutazione finora
- San Miguel ReportDocumento8 pagineSan Miguel ReportTraveller SpiritNessuna valutazione finora
- LTE ID RNP StandardizationDocumento9 pagineLTE ID RNP Standardizationahdanizar100% (1)
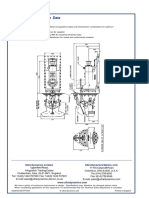
- Ultrajet 376 Installation Data: Ultra Dynamics Marine, LCC Ultra Dynamics LimitedDocumento2 pagineUltrajet 376 Installation Data: Ultra Dynamics Marine, LCC Ultra Dynamics LimitedhaujesNessuna valutazione finora
- HCL Corporate-PresentationDocumento14 pagineHCL Corporate-Presentationtony_reddyNessuna valutazione finora
- AloraDocumento3 pagineAloraTatu AradiNessuna valutazione finora
- Node MCU CarDocumento4 pagineNode MCU CarYusuf MuhthiarsaNessuna valutazione finora
- (A) Universality Principle and Subject To I.LDocumento11 pagine(A) Universality Principle and Subject To I.LKELVIN A JOHNNessuna valutazione finora
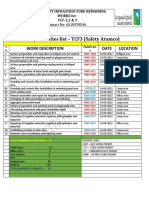
- Daily Activities List - TCF3 (Safety Aramco) : Work Description Date LocationDocumento2 pagineDaily Activities List - TCF3 (Safety Aramco) : Work Description Date LocationSheri DiĺlNessuna valutazione finora
- The Lafayette Driller: President's Message By: Lindsay LongmanDocumento7 pagineThe Lafayette Driller: President's Message By: Lindsay LongmanLoganBohannonNessuna valutazione finora
- Spice Board BBLDocumento24 pagineSpice Board BBLvenkatpficoNessuna valutazione finora
- Balanced Scorecard Approach ReportDocumento8 pagineBalanced Scorecard Approach ReportGeryes E. Haddad100% (1)
- Teit Cbgs Dmbi Lab Manual FH 2015Documento60 pagineTeit Cbgs Dmbi Lab Manual FH 2015Soumya PandeyNessuna valutazione finora
- SIConitDocumento2 pagineSIConitJosueNessuna valutazione finora
- Road Book - MoroccoDocumento28 pagineRoad Book - MoroccoCarrie YangNessuna valutazione finora
- Tugas-MPSI-P1-P14 - Kelompok 2 - 19.4A.04Documento29 pagineTugas-MPSI-P1-P14 - Kelompok 2 - 19.4A.04gilang putraNessuna valutazione finora
- Enterprise Resource Planning: Computerized AccountingDocumento14 pagineEnterprise Resource Planning: Computerized Accountingjivesh ranjan tiwariNessuna valutazione finora
- HSTE User GuideDocumento26 pagineHSTE User GuideAnca ToleaNessuna valutazione finora
- Moot Problem FinalDocumento2 pagineMoot Problem FinalHimanshi SaraiyaNessuna valutazione finora
- Ped Med HandbookDocumento27 paginePed Med HandbookSoad Shedeed0% (1)
- Ranbaxy Acquisition by DaiichiDocumento9 pagineRanbaxy Acquisition by Daiichirupe59Nessuna valutazione finora
- EU MDR FlyerDocumento12 pagineEU MDR FlyermrudhulrajNessuna valutazione finora
- BPV ApproachDocumento13 pagineBPV ApproachfwfsdNessuna valutazione finora
- BF2207 Exercise 6 - Dorchester LimitedDocumento2 pagineBF2207 Exercise 6 - Dorchester LimitedEvelyn TeoNessuna valutazione finora
- Manaloto V Veloso IIIDocumento4 pagineManaloto V Veloso IIIJan AquinoNessuna valutazione finora
- Namma Kalvi 12th Maths Chapter 4 Study Material em 213434Documento17 pagineNamma Kalvi 12th Maths Chapter 4 Study Material em 213434TSG gaming 12Nessuna valutazione finora
- Cronbach's AlphaDocumento4 pagineCronbach's AlphaHeide Orevillo Apa-apNessuna valutazione finora
- Crude Palm OilDocumento4 pagineCrude Palm OilpalmoilanalyticsNessuna valutazione finora
- Mortal Kombat XDocumento24 pagineMortal Kombat XMindSpaceApocalypseNessuna valutazione finora
- 09-03-2023 Ramadhan - Small PDFDocumento13 pagine09-03-2023 Ramadhan - Small PDFAmmarah RamnarainNessuna valutazione finora
- ZPPF ChallanDocumento1 paginaZPPF ChallanGunasekhar ReddyNessuna valutazione finora