Potrebbero piacerti anche
- Clasificación de Los MicrocontroladoresDocumento4 pagineClasificación de Los MicrocontroladoresDiego Alejandro Maya80% (5)
- Programación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeDa EverandProgramación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeNessuna valutazione finora
- Arquitecturas Embebidas y MicrocontroladoresDocumento9 pagineArquitecturas Embebidas y MicrocontroladoresAnonymous CLzr2BltYNessuna valutazione finora
- Clasificacion de Los MicrocontroladoresDocumento4 pagineClasificacion de Los MicrocontroladoresCirilo Perez100% (1)
- MicrocontroladoresDocumento11 pagineMicrocontroladoresMiguel Ángel Pérez GarcíaNessuna valutazione finora
- Unidad I. Arquitectura Interna y Externa Del MicrocontroladorDocumento54 pagineUnidad I. Arquitectura Interna y Externa Del MicrocontroladorFortino60% (5)
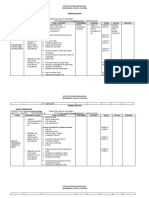
- Jornalizacion Redes de Informatica IIDocumento4 pagineJornalizacion Redes de Informatica IIJosé Abel Rosales Carranza100% (1)
- Descargar Programas NecesariosDocumento3 pagineDescargar Programas NecesariosCarla CarrascoNessuna valutazione finora
- Arquitectura de Procesadores - Jonathan HernandezDocumento15 pagineArquitectura de Procesadores - Jonathan HernandezJonathan HernandezNessuna valutazione finora
- Reporte U5Documento20 pagineReporte U5luis angelNessuna valutazione finora
- Reporte Proyecto FinalDocumento25 pagineReporte Proyecto Finalluis angelNessuna valutazione finora
- microCONTROLADORES RESUMENDocumento10 paginemicroCONTROLADORES RESUMENGemily GuerreroNessuna valutazione finora
- Microcontroladores 2020Documento6 pagineMicrocontroladores 2020andre yeraldin mezaNessuna valutazione finora
- Microcontrolador WikiDocumento5 pagineMicrocontrolador WikiAnonymous mShdTiNessuna valutazione finora
- Microcontrolador WikiDocumento14 pagineMicrocontrolador WikiMakinon Imparable ImparableNessuna valutazione finora
- Clase - Tema 1 - Tipos de Microprocesadores y MicrocontroladoresDocumento30 pagineClase - Tema 1 - Tipos de Microprocesadores y MicrocontroladoresEmiliano GarciaNessuna valutazione finora
- Características y Uso de Elementos Del MicrocontroladorDocumento31 pagineCaracterísticas y Uso de Elementos Del MicrocontroladorJames BoydNessuna valutazione finora
- FACE 2 MICROPROCESADORES Buena TareaDocumento21 pagineFACE 2 MICROPROCESADORES Buena TareaJGarciaNessuna valutazione finora
- DL 3155M24 SpaDocumento138 pagineDL 3155M24 Spag4r3ckNessuna valutazione finora
- P00 Introduccion A Los Microcontroladores PICDocumento5 pagineP00 Introduccion A Los Microcontroladores PICerenjiegarNessuna valutazione finora
- MicrocontroladoresDocumento13 pagineMicrocontroladoresJose AnguloNessuna valutazione finora
- Tema de Investigación:: Pic (Microcontrolador)Documento15 pagineTema de Investigación:: Pic (Microcontrolador)CRISTHIAN ALEXANDER DEL CASTILLO MURILLONessuna valutazione finora
- Micro ControladorDocumento7 pagineMicro ControladorDanielNessuna valutazione finora
- MICROCONTROLADOR INDUSTRIAL 2pptxDocumento22 pagineMICROCONTROLADOR INDUSTRIAL 2pptxDaniel hernandez hernandezNessuna valutazione finora
- Informe SeguidorDocumento21 pagineInforme SeguidorimderNessuna valutazione finora
- Tarea1 Investigación UberBaque 28.10.2022Documento11 pagineTarea1 Investigación UberBaque 28.10.2022Uber Baque AlmeidaNessuna valutazione finora
- Sesion 1Documento62 pagineSesion 1juanchofercho20Nessuna valutazione finora
- Laboratorio 10Documento10 pagineLaboratorio 10Rosina Garcia PilcomayoNessuna valutazione finora
- ReporteDocumento23 pagineReporteFrancisco Guadalupe Uc CanNessuna valutazione finora
- Microcontroladores 1 1Documento89 pagineMicrocontroladores 1 1Erika SamuñiNessuna valutazione finora
- Microcontrolador Vs MicroprocesadorDocumento17 pagineMicrocontrolador Vs MicroprocesadorMonserrat MejíaNessuna valutazione finora
- Trabajo 1 Arq. Del Comp.Documento8 pagineTrabajo 1 Arq. Del Comp.Luis GonzalezNessuna valutazione finora
- Proyecto Compuesrtas Logicas - ProteusDocumento7 pagineProyecto Compuesrtas Logicas - ProteusJUAN CAMILO PORRAS ALDANANessuna valutazione finora
- Fase 3. MicrocontroladoresDocumento11 pagineFase 3. Microcontroladoresangel28amdNessuna valutazione finora
- Evolución de Los Procesadores de Una LaptopDocumento20 pagineEvolución de Los Procesadores de Una LaptopVivar Rosio0% (1)
- MicrocontroladoeresDocumento5 pagineMicrocontroladoeresLESLY ARITH MENDOZA MAYORALNessuna valutazione finora
- MicrocontroladoresDocumento19 pagineMicrocontroladoresJamesBIXD100% (1)
- Unidad III Microcontroladores Sistemas ProgramablesDocumento7 pagineUnidad III Microcontroladores Sistemas Programablesmarce lopezNessuna valutazione finora
- Presentacion MicrochipDocumento11 paginePresentacion MicrochipAlfonsoNessuna valutazione finora
- Familia de Los Mi Control Adores Pic de MicrochipDocumento4 pagineFamilia de Los Mi Control Adores Pic de Microchipangeldago100% (1)
- Microcontrolador HistoriaDocumento6 pagineMicrocontrolador HistoriaJuankSalazarNessuna valutazione finora
- S1 El Ensamblador Embebido Semana 1REVDocumento4 pagineS1 El Ensamblador Embebido Semana 1REVJose MurilloNessuna valutazione finora
- LeoDocumento14 pagineLeoleo DansNessuna valutazione finora
- Proyecto Cerradura ElectronicaDocumento49 pagineProyecto Cerradura ElectronicaCarlos Lopez75% (4)
- Raspberry PiDocumento7 pagineRaspberry PiAlex FerreiraNessuna valutazione finora
- Paso 3 MicroprocesadoresDocumento14 paginePaso 3 MicroprocesadoresYolanda Garcia UrquijoNessuna valutazione finora
- Qué Es Un MicrocontroladorDocumento2 pagineQué Es Un MicrocontroladorEnrique Lopez100% (1)
- Guia 1 Fund de MicroprocesadoresDocumento15 pagineGuia 1 Fund de MicroprocesadoresEmerson Jesus Del NogalNessuna valutazione finora
- Microcontroladores Historia - Arquitectura AplicacionesDocumento89 pagineMicrocontroladores Historia - Arquitectura AplicacionesMaximiliano GiniNessuna valutazione finora
- Documento de PICSDocumento31 pagineDocumento de PICSJesus GarzaNessuna valutazione finora
- Microcontrolador Pic WikiDocumento13 pagineMicrocontrolador Pic Wikierika gonzalezNessuna valutazione finora
- Microcontroladores PicDocumento17 pagineMicrocontroladores Picgenesios silvaNessuna valutazione finora
- Microcontroladores 1Documento48 pagineMicrocontroladores 1Gastón ValenzuelaNessuna valutazione finora
- Los PIC Son Una Familia de Microcontroladores Tipo RISC Fabricados Por Microchip Technology IncDocumento8 pagineLos PIC Son Una Familia de Microcontroladores Tipo RISC Fabricados Por Microchip Technology Incfernando_sung_1Nessuna valutazione finora
- Microcontroladores PicDocumento12 pagineMicrocontroladores PicMadeline ChancayNessuna valutazione finora
- Sesion 1Documento89 pagineSesion 1Jerry JamesNessuna valutazione finora
- Microcontroladores PicDocumento6 pagineMicrocontroladores Picdonna chuco muñozNessuna valutazione finora
- Microcontrolador PIC PDFDocumento8 pagineMicrocontrolador PIC PDFRobertoGarciaNessuna valutazione finora
- Investigacion Pic Edgard Microcontroladores PicDocumento4 pagineInvestigacion Pic Edgard Microcontroladores PicEdgard Antonio Gutierrez GarciaNessuna valutazione finora
- Historia MicrocontoladoresDocumento13 pagineHistoria MicrocontoladoresToTo hostoyseNessuna valutazione finora
- Historia - Micro ControladorDocumento12 pagineHistoria - Micro ControladorJhona T IgNessuna valutazione finora
- Computación Física: Explorando la visión por computadora en la computación físicaDa EverandComputación Física: Explorando la visión por computadora en la computación físicaNessuna valutazione finora
- Clases Electronica 17Documento3 pagineClases Electronica 17orlandoNessuna valutazione finora
- P11 Timer0 Modos Contador TemporizadorDocumento4 pagineP11 Timer0 Modos Contador TemporizadororlandoNessuna valutazione finora
- P02 Bucles y Toma de Decisiones ASMDocumento12 pagineP02 Bucles y Toma de Decisiones ASMorlandoNessuna valutazione finora
- P00 Arquitectura de Los Microcontroladores PICDocumento12 pagineP00 Arquitectura de Los Microcontroladores PICorlandoNessuna valutazione finora
- El Uso de Las Tecnologías en El DWH de OLTP, OLAP, ROLAP, MOLAPDocumento3 pagineEl Uso de Las Tecnologías en El DWH de OLTP, OLAP, ROLAP, MOLAPAry AlavaNessuna valutazione finora
- GRAPH v1 6Documento50 pagineGRAPH v1 6Freddy Javier Orbes0% (1)
- Manual de Procedimientos Ingreso de Nuevos LibrosDocumento25 pagineManual de Procedimientos Ingreso de Nuevos Librosla_cenicienta_Nessuna valutazione finora
- Plantilla Excel Presupuesto Diseño GraficoDocumento19 paginePlantilla Excel Presupuesto Diseño GraficoEnder One Mc OficialNessuna valutazione finora
- Modulo de Educandos - SASA en LíneaDocumento20 pagineModulo de Educandos - SASA en LíneaReingeniería de Plazas Comunitarias100% (1)
- S15.s1 - Taller de Estructuras RepetitivasDocumento24 pagineS15.s1 - Taller de Estructuras RepetitivasKarem RodasNessuna valutazione finora
- Ensayo Generaciones de Las ComputadorasDocumento5 pagineEnsayo Generaciones de Las ComputadorasBRAYAN ALEXIS LOPEZ ALVARADONessuna valutazione finora
- Esquema de IntegridadDocumento20 pagineEsquema de IntegridadBenny ContrerasNessuna valutazione finora
- 01 FundamentalsDocumento5 pagine01 Fundamentalspedro landerosNessuna valutazione finora
- Trabajo Computacion 033445Documento10 pagineTrabajo Computacion 033445naomialborpNessuna valutazione finora
- UNIDAD 1 Estruc CompDocumento51 pagineUNIDAD 1 Estruc CompAntonio Rienzo RenatoNessuna valutazione finora
- Acceso y Selección de Perfiles Estructurales en SW y MdsolidsDocumento14 pagineAcceso y Selección de Perfiles Estructurales en SW y MdsolidsDaniel ReyesNessuna valutazione finora
- Ep 450Documento2 pagineEp 450ynogalesNessuna valutazione finora
- Como Diseñar Un Sistema de VideovigilanciaDocumento9 pagineComo Diseñar Un Sistema de VideovigilanciapktonNessuna valutazione finora
- Proyecto Integrador II2021Documento4 pagineProyecto Integrador II2021ABC DEFNessuna valutazione finora
- Trabajo de La Web 2.0Documento22 pagineTrabajo de La Web 2.0Nicol Roldan CalderonNessuna valutazione finora
- Trabajo Práctico #4Documento9 pagineTrabajo Práctico #4jbenjarNessuna valutazione finora
- HongoDocumento20 pagineHongolorenaNessuna valutazione finora
- Gemelos DigitalesDocumento2 pagineGemelos DigitalesEdwar Escalona ZambranoNessuna valutazione finora
- Trabajo Encargado Base de DatosDocumento16 pagineTrabajo Encargado Base de DatosSAIR SAMUEL BAUTISTA SANDOVALNessuna valutazione finora
- Manual Instalación SQL Server Express 2019 y SSMSDocumento11 pagineManual Instalación SQL Server Express 2019 y SSMScarlosNessuna valutazione finora
- Airbnb - Modelo CanvasDocumento2 pagineAirbnb - Modelo CanvasDaniko A.Nessuna valutazione finora
- Teclas Especiales AlexDocumento4 pagineTeclas Especiales AlexAlex Char AcendraNessuna valutazione finora
- B2.342 PEC3 RobertoPeralboSanchezDocumento70 pagineB2.342 PEC3 RobertoPeralboSanchezrobertoperalbo85Nessuna valutazione finora
- IT Government Atento CompanyDocumento20 pagineIT Government Atento Companykevin21051993Nessuna valutazione finora
- Guia de Laboratorio 2Documento3 pagineGuia de Laboratorio 2Luis DiazNessuna valutazione finora
- Aplicaciones de Los Sistemas de Numeración - Binaria, Octal y HexadecimalDocumento4 pagineAplicaciones de Los Sistemas de Numeración - Binaria, Octal y HexadecimalDavid Sandoval RiosNessuna valutazione finora
- Numero Primo IlegalDocumento3 pagineNumero Primo IlegalÁlvaro David Pinza GarciaNessuna valutazione finora