Potrebbero piacerti anche
- Incoterms y RaftdDocumento31 pagineIncoterms y RaftdAdrina López CastañedaNessuna valutazione finora
- RAFTDDocumento12 pagineRAFTDAdrina López CastañedaNessuna valutazione finora
- Qué Trámites Se Deben de Realizar Ante El Instituto Cuando Hay Salario Mixto o VariableDocumento1 paginaQué Trámites Se Deben de Realizar Ante El Instituto Cuando Hay Salario Mixto o VariableAdrina López CastañedaNessuna valutazione finora
- Unidad Ii Alternativas de Inversión y FinanciamientoDocumento5 pagineUnidad Ii Alternativas de Inversión y FinanciamientoAdrina López CastañedaNessuna valutazione finora
- Flujograma Sat e Imss (PF y PM)Documento5 pagineFlujograma Sat e Imss (PF y PM)Adrina López CastañedaNessuna valutazione finora
- PF Con Ingresos Por ArrendamientoDocumento5 paginePF Con Ingresos Por ArrendamientoAdrina López CastañedaNessuna valutazione finora
- Unidad Ii Proceso Legal y Fiscal ExpoDocumento10 pagineUnidad Ii Proceso Legal y Fiscal ExpoAdrina López CastañedaNessuna valutazione finora
- Resumen de Libro - Conde DráculaDocumento22 pagineResumen de Libro - Conde DráculaAdrina López Castañeda0% (1)
- Manual SEL 2924Documento16 pagineManual SEL 2924Adrina López CastañedaNessuna valutazione finora
- Clasificación de Los Costos EstándarDocumento1 paginaClasificación de Los Costos EstándarAdrina López Castañeda100% (1)
- Factor de Potencia 3Documento87 pagineFactor de Potencia 3Adrina López Castañeda0% (1)
- Cuestionario Preliminar AuditoriaDocumento4 pagineCuestionario Preliminar AuditoriaAdrina López CastañedaNessuna valutazione finora
- Factores Que Afectan La Calidad de La Energía y Su SoluciónDocumento161 pagineFactores Que Afectan La Calidad de La Energía y Su SoluciónAdrina López CastañedaNessuna valutazione finora
- CancionesDocumento29 pagineCancionesAdrina López CastañedaNessuna valutazione finora
- FormularioDocumento159 pagineFormularioAdrina López CastañedaNessuna valutazione finora
- Análisis de Calidad de Energía Eléctrica en El Nuevo Campus de La Universidad Politécnica SalesianaDocumento25 pagineAnálisis de Calidad de Energía Eléctrica en El Nuevo Campus de La Universidad Politécnica SalesianaAdrina López CastañedaNessuna valutazione finora
- Implementación PID en El PLC1Documento25 pagineImplementación PID en El PLC1Lenin RamirezNessuna valutazione finora
- Gu°a Taller N 3 Introducci N A L Gica CombinacionalDocumento12 pagineGu°a Taller N 3 Introducci N A L Gica CombinacionalMantención FastpackNessuna valutazione finora
- IEE244 Guia 4Documento24 pagineIEE244 Guia 4Mario JTNessuna valutazione finora
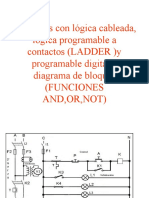
- Presentación Lenguaje de Programación Plc-LadderDocumento35 paginePresentación Lenguaje de Programación Plc-LadderLuigi Ortega100% (2)
- Silabo Controles Electricos y Automatización - Ing. Julián FloresDocumento4 pagineSilabo Controles Electricos y Automatización - Ing. Julián FloresJhair Fernando Ramos ChambillaNessuna valutazione finora
- 7 - Diagrama de ContactosDocumento35 pagine7 - Diagrama de ContactosJorge Alberto ParedesNessuna valutazione finora
- Manual TwidoDocumento131 pagineManual TwidoPablo VargasNessuna valutazione finora
- Tr1-Control de Procesos IndustrialesDocumento8 pagineTr1-Control de Procesos IndustrialesItalo Raul Aite MartinezNessuna valutazione finora
- Documento Tesis GrafcetDocumento69 pagineDocumento Tesis Grafcetdavinci.hoyosNessuna valutazione finora
- Guía Funciones Logicas de Comparación y MatemáticasDocumento30 pagineGuía Funciones Logicas de Comparación y MatemáticasHuicho RonaldNessuna valutazione finora
- Instrumentación Industrial-Informe FinalDocumento8 pagineInstrumentación Industrial-Informe FinalSimei Ayron Benites CastilloNessuna valutazione finora
- Progamación PLC FESTODocumento23 pagineProgamación PLC FESTOCésar Corona75% (4)
- Laboratorio Taller 6okDocumento17 pagineLaboratorio Taller 6okCRKarlinhoNessuna valutazione finora
- Desarrollardiagramas de Contactos en Los PLCDocumento6 pagineDesarrollardiagramas de Contactos en Los PLCelkin bolivarNessuna valutazione finora
- INFORME Recetas de PinturaDocumento13 pagineINFORME Recetas de PinturaPeter GonzalezNessuna valutazione finora
- Automatización de Procesos IndustrialesDocumento141 pagineAutomatización de Procesos IndustrialesÁLvaro Salsavilca CayetanoNessuna valutazione finora
- Informe - ARVAXDocumento5 pagineInforme - ARVAXSantiago Eduardo Díaz MartínezNessuna valutazione finora
- Resumen Presentación Mando y Control Con Lógica ProgramableDocumento25 pagineResumen Presentación Mando y Control Con Lógica ProgramableFlakete E ReyesNessuna valutazione finora
- Cuaderno de Informe - Semana Nº1 ALEXDocumento15 pagineCuaderno de Informe - Semana Nº1 ALEXOskava KenjutsuNessuna valutazione finora
- Paso Paso Ejemplo 1Documento16 paginePaso Paso Ejemplo 1Giovanny AntelizNessuna valutazione finora
- Actividad de Aprendizaje 2 - Implementar Soluciones A La Automatización de PDFDocumento7 pagineActividad de Aprendizaje 2 - Implementar Soluciones A La Automatización de PDFPedro VargasNessuna valutazione finora
- Autómatas Programables PLCDocumento74 pagineAutómatas Programables PLCTalleres Marcelo BriozzoNessuna valutazione finora
- Esquemas de ProgramaciónDocumento2 pagineEsquemas de ProgramaciónDIEGO ALAN MIRANDA ESCAMILLANessuna valutazione finora
- Actividad Experimental 6Documento14 pagineActividad Experimental 6Adrian OsorioNessuna valutazione finora
- Guía 1 - Codesys - Ladder PDFDocumento21 pagineGuía 1 - Codesys - Ladder PDFRossellPumaNessuna valutazione finora
- Libro PLCDocumento86 pagineLibro PLCJuan S. MorejónNessuna valutazione finora
- Manual Entrenamiento ABB800XADocumento502 pagineManual Entrenamiento ABB800XAJose Manuel Godoy Escribar100% (9)
- virPLC DiapositivasDocumento16 paginevirPLC DiapositivasChecho LopezNessuna valutazione finora
- Autómatas Programables: Universidad Tecnol Gica Boliviana Utb Ó Ingenier A Electr Nica Í ÓDocumento8 pagineAutómatas Programables: Universidad Tecnol Gica Boliviana Utb Ó Ingenier A Electr Nica Í ÓBrenda Olivia RamírezNessuna valutazione finora
- T03-Introduccion A Los Automatas Programables-1500Documento23 pagineT03-Introduccion A Los Automatas Programables-1500lucia lopez lopezNessuna valutazione finora