Potrebbero piacerti anche
- Presentacion Del Curso Vibraciones y Cimentacion de MaquinasDocumento25 paginePresentacion Del Curso Vibraciones y Cimentacion de MaquinasSebastian AlarconNessuna valutazione finora
- Guia Metodologica Medicion de Vibraciones Mecanicas Transmitidas Al Cuerpo Entero Usando El Banco de Pruebas VibratorioDocumento28 pagineGuia Metodologica Medicion de Vibraciones Mecanicas Transmitidas Al Cuerpo Entero Usando El Banco de Pruebas VibratorioSebastian AlarconNessuna valutazione finora
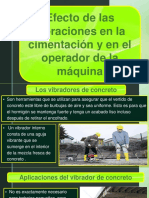
- Efecto de Las Vibraciones en La Cimentación y en El Operador de La Máquina 1Documento28 pagineEfecto de Las Vibraciones en La Cimentación y en El Operador de La Máquina 1Sebastian AlarconNessuna valutazione finora
- Capacidad de Carga UltimaDocumento18 pagineCapacidad de Carga UltimaSebastian AlarconNessuna valutazione finora
- Evaluación de Las Vibraciones Globales Transmitidas A Trabajadores en Una Empresa Agroindustrial Productora de AzúcarDocumento22 pagineEvaluación de Las Vibraciones Globales Transmitidas A Trabajadores en Una Empresa Agroindustrial Productora de AzúcarSebastian AlarconNessuna valutazione finora
- PREVIADocumento19 paginePREVIASebastian AlarconNessuna valutazione finora
- Identificación de Los Desórdenes Musculo Esqueléticos en Miembros SuperioresDocumento26 pagineIdentificación de Los Desórdenes Musculo Esqueléticos en Miembros SuperioresSebastian AlarconNessuna valutazione finora
- Presion 17Documento80 paginePresion 17Sebastian AlarconNessuna valutazione finora
- Riesgo de Las Vibraciones Mecánicas y Los Métodos de Evaluacion Por Estimación y MediciónDocumento29 pagineRiesgo de Las Vibraciones Mecánicas y Los Métodos de Evaluacion Por Estimación y MediciónSebastian Alarcon100% (1)
- Caso PetrobrasDocumento24 pagineCaso PetrobrasSebastian AlarconNessuna valutazione finora
- Problemas Parte II-1Documento8 pagineProblemas Parte II-1Sebastian Alarcon100% (1)
- Memoria 53201114Documento182 pagineMemoria 53201114Sebastian AlarconNessuna valutazione finora
- Silabo de Fisica Molecular - Ingenieria MecanicaDocumento8 pagineSilabo de Fisica Molecular - Ingenieria MecanicaSebastian AlarconNessuna valutazione finora
- Presion 17Documento80 paginePresion 17Sebastian AlarconNessuna valutazione finora
- S5 Trabajo y EnergíaDocumento4 pagineS5 Trabajo y EnergíaSebastian Alarcon100% (2)
- S4 - Problemas de Fuerzas y Aceleraciones 2Documento4 pagineS4 - Problemas de Fuerzas y Aceleraciones 2Sebastian AlarconNessuna valutazione finora
- Problemas de Fuerzas y AceleracionesDocumento8 pagineProblemas de Fuerzas y AceleracionesSebastian Alarcon100% (1)
- Aleaciones LigerasDocumento10 pagineAleaciones LigerasSebastian AlarconNessuna valutazione finora
- 2 Problemas de Cinemática de Partícula 2Documento11 pagine2 Problemas de Cinemática de Partícula 2Sebastian Alarcon100% (1)
- Fuerzas y Aceleraciones 2Documento4 pagineFuerzas y Aceleraciones 2Sebastian AlarconNessuna valutazione finora
- 2 Problemas de Cinemática de Partícula 2Documento11 pagine2 Problemas de Cinemática de Partícula 2Sebastian Alarcon100% (1)
- Lista Matriculados 2016IIDocumento551 pagineLista Matriculados 2016IISebastian AlarconNessuna valutazione finora
- Transformaciones LinealesDocumento16 pagineTransformaciones LinealesSebastian Alarcon100% (1)
- Teoria EjerciciosDocumento15 pagineTeoria Ejerciciospromec2010Nessuna valutazione finora
- Spanish Photo Me Try GuideDocumento90 pagineSpanish Photo Me Try GuideESTUDIANTE JOSE DAVID MARTINEZ RODRIGUEZNessuna valutazione finora
- Movimiento Parabólico......Documento12 pagineMovimiento Parabólico......Victor Defaz RodriguezNessuna valutazione finora
- Examen Ciencias 2 Bimestre 1 Part1Documento2 pagineExamen Ciencias 2 Bimestre 1 Part1areliNessuna valutazione finora
- Balarezo Juan - Consulta Tipos y Métodos de Excitación Guías de Onda PDFDocumento7 pagineBalarezo Juan - Consulta Tipos y Métodos de Excitación Guías de Onda PDFDario1992Nessuna valutazione finora
- Guía de Problemas de DinámicaDocumento4 pagineGuía de Problemas de DinámicaDickson LondoñoNessuna valutazione finora
- Sílabo Física III 2018-I Omar AntesanoDocumento5 pagineSílabo Física III 2018-I Omar AntesanoomaantesanoNessuna valutazione finora
- Salazar Correa Daniel Eduardo 2018Documento79 pagineSalazar Correa Daniel Eduardo 2018Siul VegaNessuna valutazione finora
- Tippens Fisica 7e Diapositivas 04a Equilibrio TraslacionalDocumento44 pagineTippens Fisica 7e Diapositivas 04a Equilibrio TraslacionalJosé TimanáNessuna valutazione finora
- Electricidad y MagnetismoDocumento5 pagineElectricidad y MagnetismoAnthony CruzNessuna valutazione finora
- Practica 3 Microscopía Biología 02 Diciembre 2020Documento12 paginePractica 3 Microscopía Biología 02 Diciembre 2020sebastian espitiaNessuna valutazione finora
- Anexo 1 Formato PAPERDocumento6 pagineAnexo 1 Formato PAPERmineiraNessuna valutazione finora
- Fuerza y Flujo MagneticoDocumento13 pagineFuerza y Flujo MagneticoGarzon LizNessuna valutazione finora
- MECÁNICA II - Actividades de Repaso DeyreDocumento5 pagineMECÁNICA II - Actividades de Repaso DeyreDeyre100% (1)
- Apuntes Electricidad y Magnetismo 1Documento13 pagineApuntes Electricidad y Magnetismo 1alexauberNessuna valutazione finora
- Electromagnetismo CDDocumento12 pagineElectromagnetismo CDCandy GiovNessuna valutazione finora
- Cinemática de Partículas en 1 DimensiónDocumento4 pagineCinemática de Partículas en 1 DimensiónCarlos MenesesNessuna valutazione finora
- Laboratorio #8Documento12 pagineLaboratorio #8Daniel Diaz CastilloNessuna valutazione finora
- Libro FDCDocumento251 pagineLibro FDCMauricio Parra BolivarNessuna valutazione finora
- Instru 46 V1Documento4 pagineInstru 46 V1SaskyNúñezNessuna valutazione finora
- 2munidad1 Movimiento 2 Mruymrua 150518204641 Lva1 App6891Documento25 pagine2munidad1 Movimiento 2 Mruymrua 150518204641 Lva1 App6891Facson GuzmanNessuna valutazione finora
- Trabajo Práctico - REGISTRO DE CAMPODocumento7 pagineTrabajo Práctico - REGISTRO DE CAMPOLuis GCNessuna valutazione finora
- Calentamiento Induccion PDFDocumento71 pagineCalentamiento Induccion PDFdiedroid100% (1)
- Olimpiadas Física de Ciencias Naturales Grado 11ºDocumento5 pagineOlimpiadas Física de Ciencias Naturales Grado 11ºCAMILO PEÑUELA CHIPATECUANessuna valutazione finora
- 1° Guía Física N°6 El Sonido 2 (Propiedades, Fenómenos y Rapidez)Documento4 pagine1° Guía Física N°6 El Sonido 2 (Propiedades, Fenómenos y Rapidez)Pía GonzálezNessuna valutazione finora
- Informe de Física 3Documento12 pagineInforme de Física 3DanielNessuna valutazione finora
- Taller 2Documento5 pagineTaller 2WilverAnderson100% (1)
- FISICA II-Trab Pract-3-08-2010 PDFDocumento168 pagineFISICA II-Trab Pract-3-08-2010 PDFGabo_SchNessuna valutazione finora
- FÍSICADocumento8 pagineFÍSICAWILDER EDIBART VALERIANO VASQUEZNessuna valutazione finora
- Accesorios RolleiflexDocumento35 pagineAccesorios RolleiflexCarlosNessuna valutazione finora