Potrebbero piacerti anche
- Periodo Natural Antonio CamilleDocumento1 paginaPeriodo Natural Antonio CamilleCarlos CortezNessuna valutazione finora
- LaBII Mola 2018 2Documento4 pagineLaBII Mola 2018 2LUCIANO BRAGA PIZZUTTINessuna valutazione finora
- Relatório Sistema RC - Resultados e DiscussãoDocumento3 pagineRelatório Sistema RC - Resultados e DiscussãoDuda MachadoNessuna valutazione finora
- Molas Mini RelatorioDocumento6 pagineMolas Mini RelatorioJoao CarvalhoNessuna valutazione finora
- Graficos AluminioDocumento1 paginaGraficos AluminioGustavo TrevenzoliNessuna valutazione finora
- Tabelas de DimensionamentosDocumento2 pagineTabelas de DimensionamentosOrlísio Sean MassingueNessuna valutazione finora
- Lei de HookeDocumento6 pagineLei de HookeWislan OliveiraNessuna valutazione finora
- Relatorio Do Experimento Laboratorio 1 MDocumento4 pagineRelatorio Do Experimento Laboratorio 1 MEdson Galante GuedesNessuna valutazione finora
- Relatório Nº4Documento5 pagineRelatório Nº4sofiafarinhasilvaNessuna valutazione finora
- Resultado e Discussao ExtraçãoDocumento6 pagineResultado e Discussao ExtraçãoMayanna VicenteNessuna valutazione finora
- Relatório de Física Experimental I - Bianca Monteiro - Documentos GoogleDocumento4 pagineRelatório de Física Experimental I - Bianca Monteiro - Documentos GooglebmontnevesNessuna valutazione finora
- Lei de HookeDocumento3 pagineLei de HookeScoxXNessuna valutazione finora
- DATOS - LAB - 1 Segunda ParteDocumento5 pagineDATOS - LAB - 1 Segunda ParteAlexander Jesús Hurtado CuchoNessuna valutazione finora
- Módulo de YoungDocumento5 pagineMódulo de YoungPedro RoqueNessuna valutazione finora
- Tabelas - Gráficos - Fábiod - Física Experimental - 1Documento1 paginaTabelas - Gráficos - Fábiod - Física Experimental - 1Fabio TorresNessuna valutazione finora
- Exercício de Peneiramento - Operações UnitáriasDocumento2 pagineExercício de Peneiramento - Operações UnitáriasJoão Pedro Tesini RochaNessuna valutazione finora
- RellatorioDocumento4 pagineRellatorioAssane Mussa AlantaraNessuna valutazione finora
- Trabalho Comp2Documento4 pagineTrabalho Comp2Luan MontserratNessuna valutazione finora
- Projeto Vistas e CortesDocumento4 pagineProjeto Vistas e CortesDaniela Fernanda TirsoNessuna valutazione finora
- Laboratório FisicaDocumento5 pagineLaboratório FisicaEdmilson FreitasNessuna valutazione finora
- TabelaDocumento2 pagineTabelaErica SofiNessuna valutazione finora
- Transferência de Calor e Massa Uma Abordagem Prática by Yunus A. Cengel, AfshiDocumento3 pagineTransferência de Calor e Massa Uma Abordagem Prática by Yunus A. Cengel, AfshiAnilda AlexandreNessuna valutazione finora
- Relatório de Física 1B - Passei DiretoDocumento4 pagineRelatório de Física 1B - Passei DiretoEmanuele ChagasNessuna valutazione finora
- Curva de Equilíbrio e Reta de Operação - P3 - OP IDocumento7 pagineCurva de Equilíbrio e Reta de Operação - P3 - OP Ivazzoleralex6884Nessuna valutazione finora
- Avaliação Dos Resultados: Velocidade X TempoDocumento5 pagineAvaliação Dos Resultados: Velocidade X TempoCristofer YanachiNessuna valutazione finora
- DISCUSSÃODocumento5 pagineDISCUSSÃOLíciaNessuna valutazione finora
- 1 Prática - Curva VxI Do DiodoDocumento8 pagine1 Prática - Curva VxI Do Diodobm1auNessuna valutazione finora
- Atividade 2 Laboratório MRUVDocumento4 pagineAtividade 2 Laboratório MRUVBruna Christmann100% (1)
- Dimensionamento Do EnrocamentoDocumento4 pagineDimensionamento Do EnrocamentoJCS EngenhariaNessuna valutazione finora
- Constante Elástica de MolasDocumento7 pagineConstante Elástica de MolasNathália NunesNessuna valutazione finora
- Reo Hidrologia 3 - UFLADocumento3 pagineReo Hidrologia 3 - UFLAJoão GabrielNessuna valutazione finora
- Cocina - Departamento 1, 2 y 5Documento1 paginaCocina - Departamento 1, 2 y 5lunaNessuna valutazione finora
- Casa John Englund - Folha A4Documento1 paginaCasa John Englund - Folha A4fabiano.mikaNessuna valutazione finora
- Relatório Do Experimento Sobre Polarização Da LuzDocumento7 pagineRelatório Do Experimento Sobre Polarização Da Luzznsdnz69njNessuna valutazione finora
- Prática 2Documento6 paginePrática 2TgHnDxD 15Nessuna valutazione finora
- Relatorio FQDocumento2 pagineRelatorio FQfrancscaNessuna valutazione finora
- FIS0315 Roteiro Plano Inclinado RelleDocumento11 pagineFIS0315 Roteiro Plano Inclinado RelleARIADNY PEREIRANessuna valutazione finora
- Metrica Ind Adequacao LGPD MG Exemplo 2021Documento12 pagineMetrica Ind Adequacao LGPD MG Exemplo 2021Patrícia NegrãoNessuna valutazione finora
- Relatorio Lei de HookeDocumento4 pagineRelatorio Lei de HookegiovanaNessuna valutazione finora
- 5 Ea 9 Abd 9836 BCDocumento90 pagine5 Ea 9 Abd 9836 BCDouglas FernandesNessuna valutazione finora
- Relatório 2 - Constante ElásticaDocumento7 pagineRelatório 2 - Constante ElásticaLaura SalesNessuna valutazione finora
- Rasgos de ChavetaDocumento4 pagineRasgos de ChavetaMauricio Luiz SavarizNessuna valutazione finora
- Mesa LateralDocumento1 paginaMesa LateralJoana silvaNessuna valutazione finora
- Ensaios de AlternadorDocumento3 pagineEnsaios de AlternadorVictória DuarteNessuna valutazione finora
- Índice de GiniDocumento3 pagineÍndice de Giniwilliam arguetaNessuna valutazione finora
- ELE - Vistas CozinhaDocumento1 paginaELE - Vistas CozinhaLyrics musicalNessuna valutazione finora
- Lista 13Documento5 pagineLista 13Luiz SabaraNessuna valutazione finora
- Relatório VDocumento13 pagineRelatório VJúlia AlvesNessuna valutazione finora
- SegurançaDocumento13 pagineSegurançaGabriel CostaNessuna valutazione finora
- Laudo SPDA CEPON - 1465846730 PDFDocumento8 pagineLaudo SPDA CEPON - 1465846730 PDFEwerton Gustavo Soares GomesNessuna valutazione finora
- Relatório 2 - Espectroanalítica - Victória H. ChagasDocumento8 pagineRelatório 2 - Espectroanalítica - Victória H. ChagasVictoria Hellen ChagasNessuna valutazione finora
- MaterialDocumento1 paginaMaterialENG. ADRIANO MASCARELLO. ADRIANO MASCARELLO SENRRANessuna valutazione finora
- Associação de Bombas em Série ApresDocumento11 pagineAssociação de Bombas em Série ApresElton Neves da SilvaNessuna valutazione finora
- Mec Lista2Documento2 pagineMec Lista2bernardo.marinho2010Nessuna valutazione finora
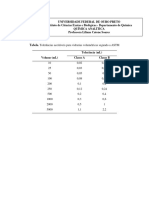
- Tolerância Vidrarias VolumétricasDocumento1 paginaTolerância Vidrarias VolumétricasPaloma SantosNessuna valutazione finora
- Dados e Gráficos - Relatório OcislaçãoDocumento2 pagineDados e Gráficos - Relatório Ocislaçãoarthurgamer995Nessuna valutazione finora
- Cálculo de Chapas e Isolamento TérmicoDocumento14 pagineCálculo de Chapas e Isolamento TérmicoNelson Antonio De Souza MendesNessuna valutazione finora
- Excel T1 MiaDocumento20 pagineExcel T1 MiadidiNessuna valutazione finora
- 06 EletrostaticaDocumento21 pagine06 EletrostaticaJoão LoboNessuna valutazione finora
- Lancamento de ProjetilDocumento7 pagineLancamento de ProjetilEMILLY ROSANessuna valutazione finora
- Aplicacoes Ajuste CurvasDocumento1 paginaAplicacoes Ajuste CurvasLeonardoFernandesNessuna valutazione finora
- Resumo de Teoria de Vôo (PP)Documento6 pagineResumo de Teoria de Vôo (PP)Adriano Zanatta100% (4)
- Ala Cailo 5 Momeno IneriaDocumento26 pagineAla Cailo 5 Momeno IneriaCamila FerreiraNessuna valutazione finora
- Mapa 12 - Sistemas Equivalente e Reducao de Um Sistema de ForcasDocumento2 pagineMapa 12 - Sistemas Equivalente e Reducao de Um Sistema de ForcasSamuel FagundesNessuna valutazione finora
- PROF PERICLES - Lista002Documento2 paginePROF PERICLES - Lista002Péricles PiresNessuna valutazione finora
- Física-Mecânica Básica - CAP - 4 Movimento em 2 e 3D - UnilasalleDocumento11 pagineFísica-Mecânica Básica - CAP - 4 Movimento em 2 e 3D - UnilasalleDalmedson Freitas FilhoNessuna valutazione finora
- Aula 7 Cisalhamento Puro (Ajustado)Documento27 pagineAula 7 Cisalhamento Puro (Ajustado)Gabriela MellerNessuna valutazione finora
- Guia de Aplicação para BobinadoresDocumento27 pagineGuia de Aplicação para BobinadoresPaulo Alves PasciniNessuna valutazione finora
- Filtros de Pressao HDADocumento7 pagineFiltros de Pressao HDAEdinho De PaulaNessuna valutazione finora
- Apostila de Física 1 Série 2022 Prof - VítorDocumento28 pagineApostila de Física 1 Série 2022 Prof - VítorVitoria Da collNessuna valutazione finora
- Relatório Ponte LevadiçaDocumento13 pagineRelatório Ponte LevadiçaCarlos GuarinoNessuna valutazione finora
- Ficha I Energia e Movimentos PDFDocumento11 pagineFicha I Energia e Movimentos PDFDom Afonso HenriquesNessuna valutazione finora
- Física e Filosofia - HeisenbergDocumento152 pagineFísica e Filosofia - HeisenbergArahantManjushri100% (4)
- Aula05 PerdasDocumento25 pagineAula05 PerdasDanilsonCabralNessuna valutazione finora
- Cap 5Documento67 pagineCap 5Antonio FerreiraNessuna valutazione finora
- Lista Revisao AlunoDocumento2 pagineLista Revisao AlunoDarcicley de Carvalho LopesNessuna valutazione finora
- Estudo Da Eletrodinà MicaDocumento10 pagineEstudo Da Eletrodinà MicaDaniel Silva Photo e DesignNessuna valutazione finora
- 9 - OndasDocumento3 pagine9 - OndasAntonio ManuelNessuna valutazione finora
- Mecanica Dos Fluidos CompressíveisDocumento149 pagineMecanica Dos Fluidos CompressíveisAlef Queiroz PereiraNessuna valutazione finora
- Ficha Global Física - 10ºano: Pena + Lua?Documento4 pagineFicha Global Física - 10ºano: Pena + Lua?Camila BrooksNessuna valutazione finora
- 11f NL (Teste3 CC)Documento3 pagine11f NL (Teste3 CC)Beatriz Oliveira0% (1)
- Conceitos Básicos No Treinamento de ForçaDocumento21 pagineConceitos Básicos No Treinamento de ForçaNelly Silvério da RochaNessuna valutazione finora
- Lista 02 TraduzidaDocumento5 pagineLista 02 TraduzidaLuiz CarlosNessuna valutazione finora
- Planejamento Anual de Física 9º AnoDocumento7 paginePlanejamento Anual de Física 9º Anolucas.faustinoNessuna valutazione finora
- 2.deslocamento, Velocidade Média, Velocidade e AceleraçãoDocumento13 pagine2.deslocamento, Velocidade Média, Velocidade e AceleraçãoCristina Casquilho M. CastroNessuna valutazione finora
- Cinematica VetorialDocumento13 pagineCinematica VetorialJanilson LopesNessuna valutazione finora
- Aula 02 - Lei de Coulomb - Tensão e CorrenteDocumento28 pagineAula 02 - Lei de Coulomb - Tensão e CorrenteLígia SilvériaNessuna valutazione finora
- 2 Escoamentos Livres Calculo Do Escoamento UniformeDocumento29 pagine2 Escoamentos Livres Calculo Do Escoamento UniformeJackson Weser de SouzaNessuna valutazione finora