Potrebbero piacerti anche
- Interpolación LinealDocumento8 pagineInterpolación LinealJose PaseroNessuna valutazione finora
- Philips L03 Manual de EntrenamientoDocumento83 paginePhilips L03 Manual de Entrenamientojessusdaniel94% (33)
- CD 1982Documento90 pagineCD 1982Martin Antonio Chu JimenezNessuna valutazione finora
- ISC Vol III PDFDocumento622 pagineISC Vol III PDFWilliam Giovanni Madariaga Malebrán80% (5)
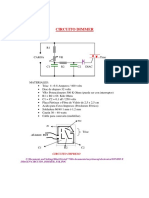
- Circuito Dimmer FSKDocumento2 pagineCircuito Dimmer FSKJose PaseroNessuna valutazione finora
- Manual 2 Maquinas de Inyeccion de PlasticoDocumento76 pagineManual 2 Maquinas de Inyeccion de PlasticoJose PaseroNessuna valutazione finora
- Ejercicio de MotoresDocumento10 pagineEjercicio de MotoresAlexis CalderonNessuna valutazione finora
- Propiedades de La Transformada de Laplace (v6)Documento4 paginePropiedades de La Transformada de Laplace (v6)Anonymous gqAlYSrsgNessuna valutazione finora
- Aprender A EscucharDocumento2 pagineAprender A EscucharJose PaseroNessuna valutazione finora
- Cilindro Que Rueda Por Una PendienteDocumento7 pagineCilindro Que Rueda Por Una PendienteJose PaseroNessuna valutazione finora
- Aprender A EscucharDocumento2 pagineAprender A EscucharJose PaseroNessuna valutazione finora
- Formulas para Calcular TransistoresDocumento3 pagineFormulas para Calcular TransistoresJose PaseroNessuna valutazione finora
- 26 En0515Documento8 pagine26 En0515Jose PaseroNessuna valutazione finora
- 21502-15 TECNOLOGÍA DE CONTROL - Introduccion Al Modelado de Sistemas Fisicos PDFDocumento15 pagine21502-15 TECNOLOGÍA DE CONTROL - Introduccion Al Modelado de Sistemas Fisicos PDFFox NekNessuna valutazione finora
- En ChileDocumento14 pagineEn ChileJose PaseroNessuna valutazione finora
- T Lab #02 - Diseño Lógico (VF) Julio 2017Documento34 pagineT Lab #02 - Diseño Lógico (VF) Julio 2017Jose PaseroNessuna valutazione finora
- Guia de Ejercicios de Sistema Trifasicos 1Documento8 pagineGuia de Ejercicios de Sistema Trifasicos 1Jose PaseroNessuna valutazione finora
- Ejercicios de DiodosDocumento33 pagineEjercicios de Diodoscharwins100% (2)
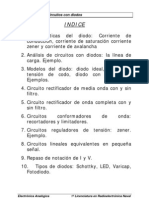
- Manual de Electronic A - Diodos y Circuitos Con DiodosDocumento29 pagineManual de Electronic A - Diodos y Circuitos Con Diodosmadenicola10100% (1)
- Clase Oferta y DemandaDocumento20 pagineClase Oferta y DemandaJose PaseroNessuna valutazione finora
- 500W MosfetDocumento9 pagine500W MosfetAlberto CerdaNessuna valutazione finora
- Problemas de TransistoresDocumento29 pagineProblemas de TransistoresHenryTruciosNessuna valutazione finora
- RPG World Vol 1 - Cap 28 - SpanishTraslationDocumento5 pagineRPG World Vol 1 - Cap 28 - SpanishTraslationJose PaseroNessuna valutazione finora
- Solicitud Tarjeta Ciudadana (Ayuntamiento Lugo) GallegoDocumento1 paginaSolicitud Tarjeta Ciudadana (Ayuntamiento Lugo) GallegoManolo De Los Santos De La VeracruzNessuna valutazione finora
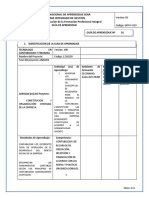
- GUIA DE APRENDIZAJE No 01.doc FUNDAMENTOS CONTABLESDocumento11 pagineGUIA DE APRENDIZAJE No 01.doc FUNDAMENTOS CONTABLESOny CassianiNessuna valutazione finora
- Sesion 4 Fuerzas Concurrentes Aplicaciones de La Primera Condición de EquilibrioDocumento3 pagineSesion 4 Fuerzas Concurrentes Aplicaciones de La Primera Condición de EquilibrioMaricela ChiloNessuna valutazione finora
- Informe Interventoria Previo Al InicioDocumento43 pagineInforme Interventoria Previo Al InicioDavid Mateo Diaz DiazNessuna valutazione finora
- 11 Esferas de Tu Perfil HologenéticoDocumento3 pagine11 Esferas de Tu Perfil HologenéticoVictoria Malvar100% (15)
- Examen HistologíaDocumento28 pagineExamen HistologíaGenesis VillalobosNessuna valutazione finora
- 7.1 AplanadosDocumento7 pagine7.1 AplanadosNAIDELY CITLALY VEGA VAZQUEZNessuna valutazione finora
- CI1, Aplicaciones de La Derivada 1, CORREGIDO PDFDocumento5 pagineCI1, Aplicaciones de La Derivada 1, CORREGIDO PDFJulio Fernando García VicenteNessuna valutazione finora
- Examen Instalaciones Eléctricas Grupo 2Documento5 pagineExamen Instalaciones Eléctricas Grupo 2Fercho FernandoNessuna valutazione finora
- ICPA GT 201 DurmientesDocumento35 pagineICPA GT 201 DurmientesJulieta FantileNessuna valutazione finora
- Lakoff & Johnson. Metáforas de La Vida Cotidiana. ResumenDocumento1 paginaLakoff & Johnson. Metáforas de La Vida Cotidiana. ResumenMatías Sanhueza ParraNessuna valutazione finora
- Code Region DP132 LG DVDDocumento1 paginaCode Region DP132 LG DVDEdward Enrique Duran GarayNessuna valutazione finora
- Concepto Ministerio - Pautas Reubicacion LaboralDocumento4 pagineConcepto Ministerio - Pautas Reubicacion LaboralAlfonso BarrantesNessuna valutazione finora
- Recursos Renovables y No RenovablesDocumento3 pagineRecursos Renovables y No Renovablesvicenteayala32Nessuna valutazione finora
- Cuadro Doble EntradaDocumento3 pagineCuadro Doble EntradaHander Joseph GonzalesNessuna valutazione finora
- Reporte LixiviaciónDocumento8 pagineReporte LixiviaciónRecRbnNessuna valutazione finora
- Internal - Combustion - Engine - Fundamentals - John HeywoodDocumento9 pagineInternal - Combustion - Engine - Fundamentals - John HeywoodRonnie Genez0% (1)
- Las Levaduras BiotecnologiaDocumento3 pagineLas Levaduras BiotecnologiaNicole Martinez ZambranoNessuna valutazione finora
- Control de Calidad Total La Modalidad JaponesaDocumento33 pagineControl de Calidad Total La Modalidad JaponesaEstefany Castro S50% (2)
- La Planeación Estratégica - en El Mercadeo DiapositivasDocumento13 pagineLa Planeación Estratégica - en El Mercadeo DiapositivasFreddy GarcìaNessuna valutazione finora
- Informe #4 - Ataque Con Fuerza BrutaDocumento15 pagineInforme #4 - Ataque Con Fuerza BrutaANDRES FELIPE BELTRAN PRIETONessuna valutazione finora
- Temario para Examen de EvaluaciónDocumento4 pagineTemario para Examen de EvaluaciónCésar Quispe Ramírez100% (1)
- VBTHDocumento9 pagineVBTHlautaroNessuna valutazione finora
- Teoria de SistemasDocumento72 pagineTeoria de SistemasPedro PykNessuna valutazione finora
- Sarmiento Varela - Instituciones CerradasDocumento5 pagineSarmiento Varela - Instituciones CerradasEve CincottaNessuna valutazione finora
- Algoritmo Del Método Simplex (Diagrama de Flujo)Documento1 paginaAlgoritmo Del Método Simplex (Diagrama de Flujo)Rock Wolcken0% (1)
- Representa UstedDocumento4 pagineRepresenta UstednfdbfdwNessuna valutazione finora
- Pre Entrega Ensayo Historia de La Vivienda SocialDocumento4 paginePre Entrega Ensayo Historia de La Vivienda Socialcristian tamayNessuna valutazione finora
- Valorizacion 02 OkDocumento43 pagineValorizacion 02 OkVice CvNessuna valutazione finora
- OdometroDocumento12 pagineOdometroEduin JiménezNessuna valutazione finora