Potrebbero piacerti anche
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Sistem Kelistrikan KapalDocumento14 pagineSistem Kelistrikan KapalJohann Sjbt94% (17)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Examples of Premature Stator Winding Failure in Recently Manufactured Motors and GeneratorsDocumento4 pagineExamples of Premature Stator Winding Failure in Recently Manufactured Motors and GeneratorsstarkopeteNessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Universal Ultrasonic Generator For Welding: W. Kardy, A. Milewski, P. Kogut and P. KlukDocumento3 pagineUniversal Ultrasonic Generator For Welding: W. Kardy, A. Milewski, P. Kogut and P. KlukPhilip EgyNessuna valutazione finora
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Diesel Generator Set: (A Wholly Owned Subsidiary of Compass Group PLC)Documento38 pagineDiesel Generator Set: (A Wholly Owned Subsidiary of Compass Group PLC)sayedmhNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
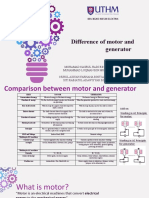
- Difference Between Motor and GeneratorDocumento11 pagineDifference Between Motor and GeneratorMohamad Nasrul Hadi Bin Mohd AyopNessuna valutazione finora
- Fault Finding at The Ge PDFDocumento2 pagineFault Finding at The Ge PDFJhonNessuna valutazione finora
- Avionics Basic Formulas, Symbols - DefinitionsDocumento20 pagineAvionics Basic Formulas, Symbols - DefinitionsDONG BUINessuna valutazione finora
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Godspower Sabastine Bruno: JANUARY, 2022Documento37 pagineGodspower Sabastine Bruno: JANUARY, 2022godspower brunoNessuna valutazione finora
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- AirpaxDocumento46 pagineAirpaxrehooter5Nessuna valutazione finora
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Internship Report of 184 MW Hydro PowerDocumento41 pagineInternship Report of 184 MW Hydro PowerDdumbashaf SamNessuna valutazione finora
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- TFW & TFDW Series AC Synchronous Generator.: Instructions For Safe Operation and MaintenanceDocumento9 pagineTFW & TFDW Series AC Synchronous Generator.: Instructions For Safe Operation and MaintenanceMark ManzanasNessuna valutazione finora
- Comparison of Static and Rotary UPS: White Paper 92Documento15 pagineComparison of Static and Rotary UPS: White Paper 92Juan AriguelNessuna valutazione finora
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- OOPS, Out-of-Phase Synchronization: Duke Energy Schweitzer Engineering Laboratories, IncDocumento11 pagineOOPS, Out-of-Phase Synchronization: Duke Energy Schweitzer Engineering Laboratories, IncFrancisco Reis FarfilhoNessuna valutazione finora
- BCI184EDocumento8 pagineBCI184ESalman FahadNessuna valutazione finora
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Project Report by Manish YadavDocumento53 pagineProject Report by Manish Yadavmanish yaduvanshiNessuna valutazione finora
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- S Class ManualDocumento66 pagineS Class ManualEliannis Vanessa Larez100% (1)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Reverse Power Protection of Alternator PDFDocumento29 pagineReverse Power Protection of Alternator PDFjupiterox75% (4)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Os D201Documento92 pagineOs D201jacmgmorgan100% (1)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- EE 340L - Experiment 6: Synchronous Generator - Operation With The GridDocumento6 pagineEE 340L - Experiment 6: Synchronous Generator - Operation With The GridMuhammad Saad AbdullahNessuna valutazione finora
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- 200ma High Frequency X-Ray Radiography SystemDocumento8 pagine200ma High Frequency X-Ray Radiography SystemcomphomeNessuna valutazione finora
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- TESUP Wind Turbine Charge Controller User-ManualDocumento19 pagineTESUP Wind Turbine Charge Controller User-ManualcaNessuna valutazione finora
- Nano Energy: Quan Zhang, Long Li, Tianhong Wang, Yichen Jiang, Yingzhong Tian, Tao Jin, Tao Yue, Chengkuo LeeDocumento11 pagineNano Energy: Quan Zhang, Long Li, Tianhong Wang, Yichen Jiang, Yingzhong Tian, Tao Jin, Tao Yue, Chengkuo Lee123Nessuna valutazione finora
- SPM 2000Documento696 pagineSPM 2000ENMANUELNessuna valutazione finora
- Online Examination Internal - I - 2017 - 18.: Signature of ExaminerDocumento11 pagineOnline Examination Internal - I - 2017 - 18.: Signature of ExaminerDeepan DattaNessuna valutazione finora
- Be142 Genset Controller ManualDocumento28 pagineBe142 Genset Controller ManualSousaFVNessuna valutazione finora
- Manual de Operacion e Instalacion Tarjeta WoodwardDocumento32 pagineManual de Operacion e Instalacion Tarjeta WoodwardXavyer Gomez100% (2)
- Shounter Volume III, Section - 4Documento99 pagineShounter Volume III, Section - 4Jawad UsmaniNessuna valutazione finora
- 240-62772907 Spec For Diesel GeneratorsDocumento62 pagine240-62772907 Spec For Diesel GeneratorsMohsin ElgondiNessuna valutazione finora
- CK-E73 H - Generator Set Detroit Diesel - Series 71 In-Line2Documento5 pagineCK-E73 H - Generator Set Detroit Diesel - Series 71 In-Line2Edward SchenkNessuna valutazione finora
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)