Potrebbero piacerti anche
- 5Documento1 pagina5Johan SonNessuna valutazione finora
- UPV Test Carbonation Test Half Potential Test Hammer Test Tickness TestDocumento24 pagineUPV Test Carbonation Test Half Potential Test Hammer Test Tickness TestJohan SonNessuna valutazione finora
- Invoice BukalapakDocumento1 paginaInvoice BukalapakJohan SonNessuna valutazione finora
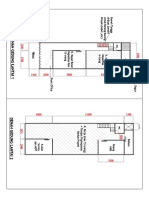
- Rencana Area Pengujian NDT Dan DT Supermall - Tangga Darurat Dan Area BasementDocumento1 paginaRencana Area Pengujian NDT Dan DT Supermall - Tangga Darurat Dan Area BasementJohan SonNessuna valutazione finora
- Desain Atribut GSI 2018Documento6 pagineDesain Atribut GSI 2018Johan SonNessuna valutazione finora
- MSDS PhenophetalinDocumento6 pagineMSDS PhenophetalinJohan SonNessuna valutazione finora
- Dam AsessmentDocumento9 pagineDam AsessmentJohan SonNessuna valutazione finora
- 1Documento1 pagina1Johan SonNessuna valutazione finora
- Method Statement For Testing-RevDocumento1 paginaMethod Statement For Testing-RevJohan SonNessuna valutazione finora
- Gmail - Your GRAB E-Receipt PDFDocumento1 paginaGmail - Your GRAB E-Receipt PDFJohan SonNessuna valutazione finora
- Upv Jembatan CisadaneDocumento18 pagineUpv Jembatan CisadaneJohan SonNessuna valutazione finora
- Point Name Deflection (M) Field Data Elevation (M) Distance (MM)Documento4 paginePoint Name Deflection (M) Field Data Elevation (M) Distance (MM)Johan SonNessuna valutazione finora
- 01 - Kedang Pahu Testing LocationDocumento5 pagine01 - Kedang Pahu Testing LocationJohan SonNessuna valutazione finora
- Profometer LinkDocumento1 paginaProfometer LinkJohan SonNessuna valutazione finora
- Vibration AssessmentDocumento37 pagineVibration AssessmentNermin PalićNessuna valutazione finora
- Weekly ReportDocumento1 paginaWeekly ReportJohan SonNessuna valutazione finora
- Appraisal Assessment Analysis Bridges Structural Trubaindo CoalDocumento3 pagineAppraisal Assessment Analysis Bridges Structural Trubaindo CoalJohan SonNessuna valutazione finora
- Profometer LinkDocumento1 paginaProfometer LinkJohan SonNessuna valutazione finora
- Rebar Locator ResultsDocumento1 paginaRebar Locator ResultsJohan SonNessuna valutazione finora
- 1Documento1 pagina1Johan SonNessuna valutazione finora
- Number ID Sample Element of Structure Direct Velocity Pulse Poisson Ratio Density (Kg/m3) Ec (Mpa) FC' MpaDocumento1 paginaNumber ID Sample Element of Structure Direct Velocity Pulse Poisson Ratio Density (Kg/m3) Ec (Mpa) FC' MpaJohan SonNessuna valutazione finora
- PT GSI Company ProfileDocumento7 paginePT GSI Company ProfileJohan SonNessuna valutazione finora
- Lion Air eTicket Itinerary Receipt CGK-JOGDocumento1 paginaLion Air eTicket Itinerary Receipt CGK-JOGDoddy Andrew KoeshertantyoNessuna valutazione finora
- Deflection Standar COdeDocumento4 pagineDeflection Standar COdeJohan SonNessuna valutazione finora
- FR Asessment NDT Dermaga Di Pekan BaruDocumento1 paginaFR Asessment NDT Dermaga Di Pekan BaruJohan SonNessuna valutazione finora
- Excel 1Documento2 pagineExcel 1Johan SonNessuna valutazione finora
- AI B-1 (Microstrain) : File Name: KOBAR 22.5.2017 TEST-02.dxd Date: 5/22/2017 Time: 11:26:23 AM Show Time 00:01:15Documento1 paginaAI B-1 (Microstrain) : File Name: KOBAR 22.5.2017 TEST-02.dxd Date: 5/22/2017 Time: 11:26:23 AM Show Time 00:01:15Johan SonNessuna valutazione finora
- Analisa Kerusakan StrukturDocumento6 pagineAnalisa Kerusakan StrukturJohan SonNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- AC Hipots 15-200kVDocumento4 pagineAC Hipots 15-200kVHung NguyenNessuna valutazione finora
- Devising a solar powered standalone vehicle using GSM communication network for remote control and surveillanceDocumento3 pagineDevising a solar powered standalone vehicle using GSM communication network for remote control and surveillancePooja BanNessuna valutazione finora
- Introduction to TechnopreneurshipDocumento33 pagineIntroduction to TechnopreneurshipMohd Faiz Ash Burn100% (1)
- MCQ Questions For Class 10 Science Electricity With Answers: Run Windows On MacDocumento3 pagineMCQ Questions For Class 10 Science Electricity With Answers: Run Windows On Macshashank srivastavaNessuna valutazione finora
- VK 20190123 09-EN-1Documento13 pagineVK 20190123 09-EN-1watisnaiNessuna valutazione finora
- Raindropz Remix - YouTubeDocumento3 pagineRaindropz Remix - YouTubeGary DiazNessuna valutazione finora
- Base Station Equipment and Radio-Frequency Signal FlowDocumento5 pagineBase Station Equipment and Radio-Frequency Signal FlowSaibal RayNessuna valutazione finora
- 18-Channel Smart Lowside Switch TLE6244X: Application NoteDocumento26 pagine18-Channel Smart Lowside Switch TLE6244X: Application Notemebarki aberraoufNessuna valutazione finora
- Solar Power Plant: Components, Working and ApplicationsDocumento8 pagineSolar Power Plant: Components, Working and ApplicationsSatyam KumarNessuna valutazione finora
- MTR3000 Basic Service Manual 68007024096 DDocumento306 pagineMTR3000 Basic Service Manual 68007024096 DSohaib Omer Salih100% (2)
- ECE521 Presentation Evaluation Form Sept 2015Documento3 pagineECE521 Presentation Evaluation Form Sept 2015ÎQbãl HãikãmNessuna valutazione finora
- TMT晤最Visual ATEDocumento516 pagineTMT晤最Visual ATE尤仁宏0% (1)
- Tetra Plex C10-ECO: Plate Heat ExchangerDocumento2 pagineTetra Plex C10-ECO: Plate Heat ExchangerĐình KiênNessuna valutazione finora
- SCDL Assignment Answering OASDocumento14 pagineSCDL Assignment Answering OASbest4reverNessuna valutazione finora
- RFID+ Reader iOS Application NotesDocumento12 pagineRFID+ Reader iOS Application NotesneocodesoftwareNessuna valutazione finora
- 1176 PDFDocumento169 pagine1176 PDFJoshua PalizaNessuna valutazione finora
- Product Sheet: Nibp100D Noninvasive Blood Pressure Monitoring SystemDocumento3 pagineProduct Sheet: Nibp100D Noninvasive Blood Pressure Monitoring SystemSadegh ShebaniNessuna valutazione finora
- Onkyo A 9155 User Manual PDFDocumento20 pagineOnkyo A 9155 User Manual PDFDusan PavlovicNessuna valutazione finora
- Conductivity Sensor PDFDocumento44 pagineConductivity Sensor PDFZac Francis DaymondNessuna valutazione finora
- Manual Generator HVP-80Documento1 paginaManual Generator HVP-80kiran kumarNessuna valutazione finora
- MemoryDocumento2 pagineMemoryMaintenance CircleNessuna valutazione finora
- History of ICTDocumento20 pagineHistory of ICTZakwan HamdanNessuna valutazione finora
- Digital Signal Processing by Ramesh BabuDocumento76 pagineDigital Signal Processing by Ramesh BabulaxmikanthNessuna valutazione finora
- Model G PressDocumento2 pagineModel G Pressbeach_lover_1970Nessuna valutazione finora
- Flight Sim MakerDocumento58 pagineFlight Sim MakerRory PeychaNessuna valutazione finora
- Introduction To Electricity & Electrical Systems: Prelim Learning ResourcesDocumento41 pagineIntroduction To Electricity & Electrical Systems: Prelim Learning ResourcesKib-anne Miguel PasikanNessuna valutazione finora
- Stoeltjes Lift Thyssen Access Flow2Documento50 pagineStoeltjes Lift Thyssen Access Flow2Arjan WijnenNessuna valutazione finora
- Digital Modulation Techniques ExplainedDocumento4 pagineDigital Modulation Techniques ExplainedJanica Rheanne JapsayNessuna valutazione finora
- Coin Operated Water Vending MachineDocumento2 pagineCoin Operated Water Vending MachineTrexine BaldelovarNessuna valutazione finora
- Complressor R134aDocumento2 pagineComplressor R134aHikmat KtkNessuna valutazione finora