Potrebbero piacerti anche
- Designing Structural Joints According To EurocodeDocumento14 pagineDesigning Structural Joints According To EurocodeRestie TeanoNessuna valutazione finora
- Modeling Methodology To Estimate The Resistance of A PrestressedDocumento10 pagineModeling Methodology To Estimate The Resistance of A PrestressednevinkoshyNessuna valutazione finora
- 571-Article Text PDF-4626-1-10-20130303Documento12 pagine571-Article Text PDF-4626-1-10-20130303CESAR ARMANDO JOSIMAR DEL CID JUAREZNessuna valutazione finora
- Reduced Stress Method For Class 4 Steel Section: Massimo MAJOWIECKI Stefano PINARDIDocumento8 pagineReduced Stress Method For Class 4 Steel Section: Massimo MAJOWIECKI Stefano PINARDIelleesseNessuna valutazione finora
- Lecture10 PDFDocumento8 pagineLecture10 PDFnihithNessuna valutazione finora
- Cend 202000015Documento12 pagineCend 202000015Rui MatosNessuna valutazione finora
- Lecture 03Documento7 pagineLecture 03nihithNessuna valutazione finora
- Esdep Lecture Note (WG14) PDFDocumento16 pagineEsdep Lecture Note (WG14) PDFRui TerrasNessuna valutazione finora
- Composite Substructures With Partial Shear Connection: Low Cycle Fatigue Behaviour and Analysis IssuesDocumento8 pagineComposite Substructures With Partial Shear Connection: Low Cycle Fatigue Behaviour and Analysis IssuesCaesarAbdullahNessuna valutazione finora
- A Compact and Simpler Formulation of The Compon 2020 Journal of ConstructionDocumento9 pagineA Compact and Simpler Formulation of The Compon 2020 Journal of ConstructionRenzo ManuelNessuna valutazione finora
- Lecture 03 PresentationDocumento20 pagineLecture 03 PresentationPrimož MožeNessuna valutazione finora
- Finite Element Analysis and Tests On Bolted End-Plate by Shi 2004Documento12 pagineFinite Element Analysis and Tests On Bolted End-Plate by Shi 2004fahmi aballiNessuna valutazione finora
- A Fatigue Damage Model For (090) FRP - Varavani, FarahaniDocumento18 pagineA Fatigue Damage Model For (090) FRP - Varavani, FarahaniFairin RenishNessuna valutazione finora
- Local Buckling of SteelDocumento8 pagineLocal Buckling of Steelvishal varshneyNessuna valutazione finora
- Bolt Design of Various ConnectionsDocumento12 pagineBolt Design of Various ConnectionsAlket DhamiNessuna valutazione finora
- Pinho, Iannucci, Robinson - 2006 - Physically Based Failure Models and Criteria For Laminated Fibre-Reinforced Composites With EmphasisDocumento12 paginePinho, Iannucci, Robinson - 2006 - Physically Based Failure Models and Criteria For Laminated Fibre-Reinforced Composites With EmphasisfayazNessuna valutazione finora
- 2006 Coelho SCS 6Documento22 pagine2006 Coelho SCS 6Sara BACHIRNessuna valutazione finora
- Compendium of en 1993 1 1Documento85 pagineCompendium of en 1993 1 1ahemadamNessuna valutazione finora
- Fatigue Life Assessment of Welded Cover Plate byDocumento9 pagineFatigue Life Assessment of Welded Cover Plate byNouman IqbalNessuna valutazione finora
- Buckling Analysis of Steel BridgesDocumento16 pagineBuckling Analysis of Steel BridgesVivaCharlesNessuna valutazione finora
- Classification RC BC JointsDocumento11 pagineClassification RC BC JointsArfat Naeem NajmiNessuna valutazione finora
- Materials: Experimental and Numerical Study of The Elastic SCF of Tubular JointsDocumento20 pagineMaterials: Experimental and Numerical Study of The Elastic SCF of Tubular JointsPritham RaoNessuna valutazione finora
- RCD LabDocumento17 pagineRCD LabLaw Soriano Sto DomingoNessuna valutazione finora
- Fastener Modeling For Joining Parts Modeled by Shell and SolidDocumento26 pagineFastener Modeling For Joining Parts Modeled by Shell and SolideguldirimNessuna valutazione finora
- Joints in Steel ConstructionDocumento82 pagineJoints in Steel ConstructionmileNessuna valutazione finora
- Classification RC BC JointsDocumento11 pagineClassification RC BC JointsMARUFNessuna valutazione finora
- 856-Article Text-4773-1-10-20130303Documento9 pagine856-Article Text-4773-1-10-20130303Boopathy AnnaNessuna valutazione finora
- Study of Reinforced Concrete Beam-Column JointDocumento4 pagineStudy of Reinforced Concrete Beam-Column JointChua ZhenyuNessuna valutazione finora
- Dynamic StiffnessDocumento6 pagineDynamic StiffnessArshadahcNessuna valutazione finora
- An Analytical Model For The Strength Prediction of Hybrid (Boltedbonded) Composite JointsDocumento9 pagineAn Analytical Model For The Strength Prediction of Hybrid (Boltedbonded) Composite Jointskhudhayer1970Nessuna valutazione finora
- Pre-Design of Semi-Rigid Joints in Steel Frames: January 1994Documento20 paginePre-Design of Semi-Rigid Joints in Steel Frames: January 1994Mohamed Gamal100% (1)
- Steel Design EC3Documento45 pagineSteel Design EC3Tiago CunhaNessuna valutazione finora
- Structural Steelwork EurocodesDocumento11 pagineStructural Steelwork Eurocodessofronije2005Nessuna valutazione finora
- Engeurocode Training - En1994-1-1 PDFDocumento34 pagineEngeurocode Training - En1994-1-1 PDFAbdulla AljundiNessuna valutazione finora
- Doklad - Vsu 2013-1 enDocumento6 pagineDoklad - Vsu 2013-1 entayebNessuna valutazione finora
- Bijlaard Part 1 8Documento17 pagineBijlaard Part 1 8Jie RongNessuna valutazione finora
- Module 4 Member Design - Lecture 9 Local Buckling and Section ClassificationDocumento17 pagineModule 4 Member Design - Lecture 9 Local Buckling and Section ClassificationSebastian Anthony TotiNessuna valutazione finora
- Manuscript 78 PDFDocumento9 pagineManuscript 78 PDFGhitzaaaNessuna valutazione finora
- Joints in Steel Structures Based On Eurocode 3Documento17 pagineJoints in Steel Structures Based On Eurocode 3uhu_plus6482Nessuna valutazione finora
- Fatigue Life Assessment of Bolted Connections: Aliou Badara Camara, Fabienne PennecDocumento8 pagineFatigue Life Assessment of Bolted Connections: Aliou Badara Camara, Fabienne Pennecprraaddeej chatelNessuna valutazione finora
- Effective Stiffness For Structural Analysis of Buildings in EarthquakeDocumento8 pagineEffective Stiffness For Structural Analysis of Buildings in EarthquakeNick Darwin Sanchez HuatayNessuna valutazione finora
- Corrugated Web BeamDocumento4 pagineCorrugated Web BeamNegin MalekiNessuna valutazione finora
- Effective Design Tension Resistance of BDocumento8 pagineEffective Design Tension Resistance of BPaulo_1970Nessuna valutazione finora
- EN1993 Practice Paper-Buckling Analysis of Steel BridgesDocumento16 pagineEN1993 Practice Paper-Buckling Analysis of Steel BridgesaktcNessuna valutazione finora
- 2859 10660 1 PBDocumento16 pagine2859 10660 1 PBlaich_mustaNessuna valutazione finora
- Meng (2018) - Finite Element Analysis of Bridge Crane Metal Structure Based On ABAQUSDocumento5 pagineMeng (2018) - Finite Element Analysis of Bridge Crane Metal Structure Based On ABAQUSGogyNessuna valutazione finora
- Lecture5 AllDocumento43 pagineLecture5 Alladeelyj100% (1)
- Biaxial Bending Moment Magnifier MethodDocumento13 pagineBiaxial Bending Moment Magnifier MethodBhavin SolankiNessuna valutazione finora
- Chapter 3Documento12 pagineChapter 3fantaayansa9Nessuna valutazione finora
- The STRUT Part 1Documento15 pagineThe STRUT Part 1Badr AmmarNessuna valutazione finora
- Analyzing Some Behavior of A Cracked Beam Under Pressure: B. YazdizadehDocumento8 pagineAnalyzing Some Behavior of A Cracked Beam Under Pressure: B. YazdizadehMustafa MoussaouiNessuna valutazione finora
- Ductility of Prefabricated Cage Reinforced Concrete Beams: Analytical StudyDocumento9 pagineDuctility of Prefabricated Cage Reinforced Concrete Beams: Analytical StudymagdyamdbNessuna valutazione finora
- Structural Steelwork Eurocodes: Development of A Trans-National ApproachDocumento15 pagineStructural Steelwork Eurocodes: Development of A Trans-National ApproachxangNessuna valutazione finora
- 3d RC ColumnsDocumento14 pagine3d RC ColumnsKay AdekoyaNessuna valutazione finora
- 2003 Fatigue Rubber JRRTDocumento5 pagine2003 Fatigue Rubber JRRTagung_wpNessuna valutazione finora
- Couchaux Et Al-2017-Ce/papersDocumento10 pagineCouchaux Et Al-2017-Ce/papersCuneyt VatanseverNessuna valutazione finora
- Dynamic Damage and FragmentationDa EverandDynamic Damage and FragmentationDavid Edward LambertNessuna valutazione finora
- Modeling and Dimensioning of Structures: An IntroductionDa EverandModeling and Dimensioning of Structures: An IntroductionNessuna valutazione finora
- 2.calaculul Imbinarii Cu Sudura Imbinare Guseu-Contravantuire: 2UPN 160Documento2 pagine2.calaculul Imbinarii Cu Sudura Imbinare Guseu-Contravantuire: 2UPN 160Anonymous qjoKrp0oNessuna valutazione finora
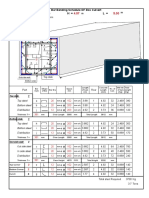
- Bar Bending Schedule OF Box Culvert: Top Steel Bottom Steel DistributionDocumento1 paginaBar Bending Schedule OF Box Culvert: Top Steel Bottom Steel DistributionAnonymous qjoKrp0oNessuna valutazione finora
- 2.calaculul Imbinarii Cu Sudura Imbinare Guseu-Contravantuire: 2UPN 160Documento1 pagina2.calaculul Imbinarii Cu Sudura Imbinare Guseu-Contravantuire: 2UPN 160Anonymous qjoKrp0oNessuna valutazione finora
- Radio Frequency Transmitter Type 1: System OperationDocumento2 pagineRadio Frequency Transmitter Type 1: System OperationAnonymous qjoKrp0oNessuna valutazione finora
- Working Together in Allplan enDocumento25 pagineWorking Together in Allplan enAnonymous qjoKrp0oNessuna valutazione finora
- CE Marking GuideDocumento26 pagineCE Marking GuideAnonymous qjoKrp0oNessuna valutazione finora
- Ce Marking in Steel Construction: Luís Simões Da SilvaDocumento57 pagineCe Marking in Steel Construction: Luís Simões Da SilvaAnonymous qjoKrp0oNessuna valutazione finora
- Company Name: UPT Timisoara TimisDocumento1 paginaCompany Name: UPT Timisoara TimisAnonymous qjoKrp0oNessuna valutazione finora
- Company Name: UPT Timisoara TimisDocumento1 paginaCompany Name: UPT Timisoara TimisAnonymous qjoKrp0oNessuna valutazione finora
- IncercariDocumento7 pagineIncercariAnonymous qjoKrp0oNessuna valutazione finora
- Company Name: UPT Timisoara TimisDocumento1 paginaCompany Name: UPT Timisoara TimisAnonymous qjoKrp0oNessuna valutazione finora
- Invelitoare Din Tigla Rosie: Company NameDocumento1 paginaInvelitoare Din Tigla Rosie: Company NameAnonymous qjoKrp0oNessuna valutazione finora
- Testing of C - 2006 - Pull-Off PDFDocumento6 pagineTesting of C - 2006 - Pull-Off PDFAnonymous qjoKrp0oNessuna valutazione finora
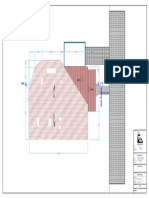
- COFRAJ Layout3Documento1 paginaCOFRAJ Layout3Anonymous qjoKrp0oNessuna valutazione finora
- A Study On Training & Development in Kurnool: Yamaha Motors P.Chakrapani ReddyDocumento7 pagineA Study On Training & Development in Kurnool: Yamaha Motors P.Chakrapani ReddybagyaNessuna valutazione finora
- Target Markets, Segmentation and EvaluationDocumento42 pagineTarget Markets, Segmentation and EvaluationoneNessuna valutazione finora
- (Psychology of Learning and Motivation 60) Brian H. Ross (Eds.) - Psychology of Learning and Motivation, Volume 60-Academic Press (2014)Documento361 pagine(Psychology of Learning and Motivation 60) Brian H. Ross (Eds.) - Psychology of Learning and Motivation, Volume 60-Academic Press (2014)AutosmartNessuna valutazione finora
- Adolescent Wellbeing Background Paper Agency and ResilienceDocumento11 pagineAdolescent Wellbeing Background Paper Agency and ResilienceSyakaa WilliamNessuna valutazione finora
- The Legend of The Seven WhalesDocumento1 paginaThe Legend of The Seven WhalesSue WestNessuna valutazione finora
- Computerized Teacher Evaluation System ThesisDocumento6 pagineComputerized Teacher Evaluation System ThesisAsia Smith100% (2)
- Thesis On Road Accident in GhanaDocumento5 pagineThesis On Road Accident in Ghanaafcnftqep100% (2)
- Irse News 147 Jul 09Documento40 pagineIrse News 147 Jul 09mihaiNessuna valutazione finora
- Cigarette Smoking Teens Published JNSRDocumento10 pagineCigarette Smoking Teens Published JNSRJusil RayoNessuna valutazione finora
- Intellectual Disability Tools - ECEDocumento43 pagineIntellectual Disability Tools - ECELukiyo OwuorNessuna valutazione finora
- Experimental Psychology and The Scientific Method: Instructor: Mr. Omar T. BualanDocumento22 pagineExperimental Psychology and The Scientific Method: Instructor: Mr. Omar T. BualanAndrea JonNessuna valutazione finora
- An Introduction To Statistical InferenceDocumento33 pagineAn Introduction To Statistical InferenceWathz NawarathnaNessuna valutazione finora
- Humanities 1 SyllabusDocumento6 pagineHumanities 1 SyllabusEder Aguirre CapangpanganNessuna valutazione finora
- Plugin-Does Management Accounting Play Role in Planning ProcessDocumento8 paginePlugin-Does Management Accounting Play Role in Planning ProcessyugatharanNessuna valutazione finora
- 008fnh Bacani FTDocumento6 pagine008fnh Bacani FTmauliana maul100% (1)
- Online Drug Trade - A Threat To Pharmaceutical IndustryDocumento6 pagineOnline Drug Trade - A Threat To Pharmaceutical Industrydr duglusNessuna valutazione finora
- 39 CS Pham Van TacDocumento55 pagine39 CS Pham Van TacLan VuongNessuna valutazione finora
- 4.+Jurnal+TC+Desember+2021 Fix-63-78 CompressedDocumento16 pagine4.+Jurnal+TC+Desember+2021 Fix-63-78 CompressedRahayu Syahdila FitriNessuna valutazione finora
- Theory Based Evaluation: Past, Present, and FutureDocumento19 pagineTheory Based Evaluation: Past, Present, and FutureAlberto ComéNessuna valutazione finora
- Red and Yellow FlagsDocumento2 pagineRed and Yellow FlagsAbdillahNessuna valutazione finora
- An Authors Guideline For Obstetrics and GynDocumento9 pagineAn Authors Guideline For Obstetrics and Gynmec429Nessuna valutazione finora
- Introduction To Statistics ModuleDocumento101 pagineIntroduction To Statistics ModuleBelsty Wale KibretNessuna valutazione finora
- ID Strategi Komunikasi Pemasaran Nestle Dancow Calcium Plus Sebagai Produk Baru DiDocumento14 pagineID Strategi Komunikasi Pemasaran Nestle Dancow Calcium Plus Sebagai Produk Baru DicynthiaNessuna valutazione finora
- 2019 Graduate DissertationsDocumento2 pagine2019 Graduate Dissertationsbony irawanNessuna valutazione finora
- Chem 105 Syllabus 2013 SpringDocumento4 pagineChem 105 Syllabus 2013 SpringemuphychemNessuna valutazione finora
- Mapua Thesis Format 2020Documento12 pagineMapua Thesis Format 2020Synchelle CarmeloNessuna valutazione finora
- Activity-Based Costing How Far Have We Come InternationallyDocumento7 pagineActivity-Based Costing How Far Have We Come Internationallyapi-3709659Nessuna valutazione finora
- Diana HornoiuDocumento2 pagineDiana HornoiuAlexandra DorobanţuNessuna valutazione finora
- A Project ReportDocumento59 pagineA Project ReportRishav RajNessuna valutazione finora
- Beyond Caring For The Senile: Experiences of Primary Caregivers With Family Members Diagnosed With Alzheimer's DiseaseDocumento98 pagineBeyond Caring For The Senile: Experiences of Primary Caregivers With Family Members Diagnosed With Alzheimer's DiseaseAnna Katrina QuanicoNessuna valutazione finora