Potrebbero piacerti anche
- MPMC NewmanualDocumento186 pagineMPMC NewmanualMusicallyAhp0% (1)
- Assembly Language Program With 8085 MicroprocessorDocumento22 pagineAssembly Language Program With 8085 MicroprocessorSithija AlwisNessuna valutazione finora
- (Updated) Rajan Microprocessor Lab Manual-1 (16!11!2012)Documento113 pagine(Updated) Rajan Microprocessor Lab Manual-1 (16!11!2012)Thiagu RajivNessuna valutazione finora
- Division of Two 8 Bit NumbersDocumento2 pagineDivision of Two 8 Bit Numbersanimesh_14Nessuna valutazione finora
- Mpmcmanual New Ee8681Documento86 pagineMpmcmanual New Ee8681JEEVANANTHAM ShanmugavelNessuna valutazione finora
- Microprocessors and Applications Programming Models and Instruction SetsDocumento87 pagineMicroprocessors and Applications Programming Models and Instruction SetsReethu Paravada100% (1)
- 8085 Microprocessor Programs: Microprocessor & Microcontroller Lab ManualDocumento16 pagine8085 Microprocessor Programs: Microprocessor & Microcontroller Lab ManualLIFE of PSNessuna valutazione finora
- MicroprocessorDocumento11 pagineMicroprocessorsachanaNessuna valutazione finora
- Assignment 1Documento9 pagineAssignment 1Smarajit MishraNessuna valutazione finora
- Microprocessor and Architecture Solution PDFDocumento23 pagineMicroprocessor and Architecture Solution PDFKarmaveer Bhaurao Patil CollegeNessuna valutazione finora
- Experiment 2: To Perform Addition & Subtraction of Two 8 Bit Numbers Using Microprocessor 8085A and 8051Documento10 pagineExperiment 2: To Perform Addition & Subtraction of Two 8 Bit Numbers Using Microprocessor 8085A and 8051Swapnita GoyalNessuna valutazione finora
- CS2259 Microprocessors Lab ManualDocumento140 pagineCS2259 Microprocessors Lab ManualMaheswari SubramaniNessuna valutazione finora
- IV 8051manua PDFDocumento56 pagineIV 8051manua PDFIrfan KhanNessuna valutazione finora
- Introduction To Motorola 6800Documento45 pagineIntroduction To Motorola 6800api-249964743Nessuna valutazione finora
- Mec ManualDocumento57 pagineMec ManualJ. VinithaNessuna valutazione finora
- MPI Lab Manual PDFDocumento25 pagineMPI Lab Manual PDFAbhishek KapadneNessuna valutazione finora
- Microcontroller Lab ManualDocumento38 pagineMicrocontroller Lab ManualAkash Kumar58% (12)
- XCS 234Documento20 pagineXCS 234Balaji VenkatesanNessuna valutazione finora
- MPMC Lab Manual To PrintDocumento138 pagineMPMC Lab Manual To PrintKasthuri SelvamNessuna valutazione finora
- 8085 Lab AssignmentDocumento4 pagine8085 Lab AssignmentShaswata Dutta50% (2)
- Microprocessor AssignmentDocumento35 pagineMicroprocessor AssignmentKaustav MallickNessuna valutazione finora
- Lab 1Documento4 pagineLab 1Saugat TripathiNessuna valutazione finora
- Cs0211 - Microprocessor Lab Laboratory ManualDocumento21 pagineCs0211 - Microprocessor Lab Laboratory ManualPrashant KumarNessuna valutazione finora
- MP Lab Manual StudentDocumento111 pagineMP Lab Manual StudentVinu ArunagiriNessuna valutazione finora
- Unit 1: MPI (CST-282, ITT-282) SUBMISSION DATE: 14.02.2020Documento9 pagineUnit 1: MPI (CST-282, ITT-282) SUBMISSION DATE: 14.02.2020Shruti SinghNessuna valutazione finora
- Microcontroller Lab ManualDocumento38 pagineMicrocontroller Lab Manualharshitha100% (1)
- Introduction to 8085 Microprocessor Lab Program for Addition, Subtraction and Code CopyingDocumento9 pagineIntroduction to 8085 Microprocessor Lab Program for Addition, Subtraction and Code CopyingPinakiRanjanSarkarNessuna valutazione finora
- Lab 1-E4160 SimulationDocumento3 pagineLab 1-E4160 SimulationThava Kumar DevanayagamNessuna valutazione finora
- Microprocessor ProgramsDocumento24 pagineMicroprocessor Programsna_hariprsad50% (2)
- 8085 ProgramsDocumento4 pagine8085 ProgramsprasadNessuna valutazione finora
- AE2406 Lab ManualDocumento73 pagineAE2406 Lab ManualSathya NarayananNessuna valutazione finora
- 2 Marks Questions and Answers Ec65-Microprocessor and MicroconrollersDocumento19 pagine2 Marks Questions and Answers Ec65-Microprocessor and MicroconrollerstaksasNessuna valutazione finora
- 2 Marks Questions and Answers Ec65-Microprocessor and MicroconrollersDocumento19 pagine2 Marks Questions and Answers Ec65-Microprocessor and MicroconrollersAnonymous 3XeTp7drNessuna valutazione finora
- MicroprocessorsDocumento24 pagineMicroprocessorsarokiarajNessuna valutazione finora
- Micro SHSDocumento35 pagineMicro SHSgauri kadyanNessuna valutazione finora
- ATMEGA8 Expt 1Documento2 pagineATMEGA8 Expt 1कुलदीप पुरोहितNessuna valutazione finora
- Cse Lab Manual MicroprocessorDocumento51 pagineCse Lab Manual MicroprocessorarwinNessuna valutazione finora
- Microprocessor Experiments List and Code for Finding Smallest NumberDocumento21 pagineMicroprocessor Experiments List and Code for Finding Smallest NumbermajorjawarpartapNessuna valutazione finora
- 8051 2ed Soft Lab8Documento3 pagine8051 2ed Soft Lab8enggsabiNessuna valutazione finora
- ESD TutoDocumento5 pagineESD TutoSwaroop MohapatraNessuna valutazione finora
- Microprocessor and Microcontroller LaboratoryDocumento70 pagineMicroprocessor and Microcontroller LaboratorythivyaprasadNessuna valutazione finora
- MC Lab Manual Vtu8Documento44 pagineMC Lab Manual Vtu8legend99hackerNessuna valutazione finora
- 2356Documento175 pagine2356ansarierNessuna valutazione finora
- Manual 06Documento7 pagineManual 06REHAM DEE CAMAMANessuna valutazione finora
- Assignment 1 & 2 MPDocumento2 pagineAssignment 1 & 2 MPa2patel0% (1)
- CS2259 Microprocessors Lab Syllabus - Programming, Interfacing ExperimentsDocumento58 pagineCS2259 Microprocessors Lab Syllabus - Programming, Interfacing ExperimentsrishikarthickNessuna valutazione finora
- Microprocessors and Interfacing Lab ManualDocumento59 pagineMicroprocessors and Interfacing Lab ManualHades LifeNessuna valutazione finora
- Micro Controller Lab ManualDocumento36 pagineMicro Controller Lab ManualKefiraNessuna valutazione finora
- Microcontroller Lab ProgramsDocumento66 pagineMicrocontroller Lab ProgramsRamesh HegdeNessuna valutazione finora
- Lab ManualDocumento90 pagineLab ManualNathiya DeepanNessuna valutazione finora
- Cse Lab Manual MicroprocessorDocumento52 pagineCse Lab Manual MicroprocessorDr-Engr ShahMurtaza RashidAl MasudNessuna valutazione finora
- Experiment 1 (A) : AIM: - Software & Hardware Used: - Assembly Language ProgramDocumento22 pagineExperiment 1 (A) : AIM: - Software & Hardware Used: - Assembly Language ProgramAman SharmaNessuna valutazione finora
- Projects With Microcontrollers And PICCDa EverandProjects With Microcontrollers And PICCValutazione: 5 su 5 stelle5/5 (1)
- ARM Microcontrollers Programming for Embedded SystemsDa EverandARM Microcontrollers Programming for Embedded SystemsValutazione: 5 su 5 stelle5/5 (1)
- C Programming for the Pc the Mac and the Arduino Microcontroller SystemDa EverandC Programming for the Pc the Mac and the Arduino Microcontroller SystemNessuna valutazione finora
- CREO-Student List - AttendanceDocumento1 paginaCREO-Student List - AttendanceJackson ..Nessuna valutazione finora
- Name List PDFDocumento2 pagineName List PDFJackson ..Nessuna valutazione finora
- Syllabus CoverageDocumento1 paginaSyllabus CoverageJackson ..Nessuna valutazione finora
- ME2353 Finite Element Analysis NovDec 2015 QPDocumento3 pagineME2353 Finite Element Analysis NovDec 2015 QPJackson ..Nessuna valutazione finora
- FormulaDocumento12 pagineFormulaJackson ..Nessuna valutazione finora
- Fea 6Documento11 pagineFea 6Jackson ..Nessuna valutazione finora
- Unit-V: Isoparametric FormulationDocumento9 pagineUnit-V: Isoparametric FormulationJackson ..Nessuna valutazione finora
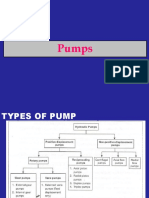
- PumpDocumento38 paginePumpJackson ..Nessuna valutazione finora
- Unit IDocumento5 pagineUnit IJackson ..Nessuna valutazione finora
- Ie433 Cad/Cam Computer Aided Design and Computer Aided Manufacturing Part-1 Introduction To CAD/CAMDocumento27 pagineIe433 Cad/Cam Computer Aided Design and Computer Aided Manufacturing Part-1 Introduction To CAD/CAMJackson ..Nessuna valutazione finora
- Benefits of CIM Integration in ManufacturingDocumento18 pagineBenefits of CIM Integration in ManufacturingJackson ..Nessuna valutazione finora
- Syllabus R2013 PDFDocumento105 pagineSyllabus R2013 PDFlogeshboy007Nessuna valutazione finora
- Introduction To Finite Element MethodDocumento202 pagineIntroduction To Finite Element MethodPrithviraj Daga80% (15)
- Fea Data Book 1Documento3 pagineFea Data Book 1Jackson ..Nessuna valutazione finora
- Engineering Materials and Metallurgy Notes PDFDocumento0 pagineEngineering Materials and Metallurgy Notes PDFSenthilkumar Subbiah50% (2)
- Front PageDocumento9 pagineFront PageJackson ..Nessuna valutazione finora
- 1st Semester SjhjkyllabusDocumento13 pagine1st Semester SjhjkyllabusJackson ..Nessuna valutazione finora
- Front PageDocumento9 pagineFront PageJackson ..Nessuna valutazione finora
- M T 1Documento2 pagineM T 1sumikannuNessuna valutazione finora
- Joining ProcessDocumento122 pagineJoining ProcessJackson ..Nessuna valutazione finora
- TUT1Unit: 10 TUT2Unit: 10 TUT3Unit: 30 TUT4Unit: 30 TUT5Unit: 30 TUT6Unit: 30 TUT7Unit: 40Documento1 paginaTUT1Unit: 10 TUT2Unit: 10 TUT3Unit: 30 TUT4Unit: 30 TUT5Unit: 30 TUT6Unit: 30 TUT7Unit: 40Jackson ..Nessuna valutazione finora
- 1 Introduction MechatronicsDocumento77 pagine1 Introduction MechatronicsJeewan AtwalNessuna valutazione finora
- Course: ME 2252 - Manufacturing Technology - II - Class: BEMEC-2012-4-A Course Objective(s)Documento7 pagineCourse: ME 2252 - Manufacturing Technology - II - Class: BEMEC-2012-4-A Course Objective(s)Jackson ..Nessuna valutazione finora
- Manufacturing IDocumento28 pagineManufacturing IJackson ..Nessuna valutazione finora
- New Microsoft Office Word DocumentDocumento2 pagineNew Microsoft Office Word DocumentJackson ..Nessuna valutazione finora
- Process Planning & Cost Estimation Question BankDocumento12 pagineProcess Planning & Cost Estimation Question Banksanbharani4242100% (2)
- Text BooksDocumento2 pagineText BooksJackson ..Nessuna valutazione finora
- Lesson List PpceDocumento2 pagineLesson List PpceJackson ..Nessuna valutazione finora
- SyallabusDocumento3 pagineSyallabusJackson ..Nessuna valutazione finora
- IoT Based Smart Currency Counter Using NodeMCUDocumento47 pagineIoT Based Smart Currency Counter Using NodeMCUprabhu rachuti100% (1)
- HP ProLiant ML110 G7 DatasheetDocumento4 pagineHP ProLiant ML110 G7 DatasheetDeepak Gupta (DG)Nessuna valutazione finora
- Aspire m3581tDocumento234 pagineAspire m3581tALP1981Nessuna valutazione finora
- Yamaha Fazer-Fzh150 CatalogueDocumento55 pagineYamaha Fazer-Fzh150 CatalogueAnonymous KoA00wXXD69% (13)
- Scientech 71: Best Choice For Your PCB LabDocumento2 pagineScientech 71: Best Choice For Your PCB LabSourabh HajraNessuna valutazione finora
- SQL-MSDE For AccuMarkDocumento5 pagineSQL-MSDE For AccuMarkDora BA100% (1)
- 3412 Generator Set 4BZ00001-UP (SEBP2785 - 48) - DocumentationDocumento15 pagine3412 Generator Set 4BZ00001-UP (SEBP2785 - 48) - DocumentationAdel FawziNessuna valutazione finora
- KM 2020Documento2 pagineKM 2020Gelos PaniqueNessuna valutazione finora
- Advant Controller 160Documento4 pagineAdvant Controller 160BMNessuna valutazione finora
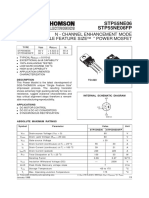
- Stp55ne06 PDFDocumento9 pagineStp55ne06 PDFOmar CuevasNessuna valutazione finora
- ARM CORTEX - M & OMAP ProcessorsDocumento34 pagineARM CORTEX - M & OMAP ProcessorsMaruthi Rao100% (1)
- Wurth WoW! 4 Installing Software PDFDocumento47 pagineWurth WoW! 4 Installing Software PDFmxnoxnNessuna valutazione finora
- R44 Maintenance Manual Chapter 1 IntroductionDocumento60 pagineR44 Maintenance Manual Chapter 1 IntroductionLoki WartoothNessuna valutazione finora
- LCD TV SERVICE MANUALDocumento17 pagineLCD TV SERVICE MANUALMatias416Nessuna valutazione finora
- FileDocumento114 pagineFilevaibhav shuklaNessuna valutazione finora
- Common Sap Gui Problems and SolutionsDocumento41 pagineCommon Sap Gui Problems and SolutionsRaghavendhar ReddyNessuna valutazione finora
- Distance Protection 7SA6xx (Manual) PDFDocumento804 pagineDistance Protection 7SA6xx (Manual) PDFJefferson Huerta OlivaresNessuna valutazione finora
- NFA DFA Languages Assignment Theory ComputationDocumento10 pagineNFA DFA Languages Assignment Theory ComputationKhuram ShahzadNessuna valutazione finora
- Installation Manual - OPGW Tension SetDocumento3 pagineInstallation Manual - OPGW Tension Sethcindustry100% (2)
- ADA MP-1 Level Switch ModDocumento5 pagineADA MP-1 Level Switch ModAndrei PopaNessuna valutazione finora
- Embedded Systems ProjectDocumento34 pagineEmbedded Systems Projectmrs.mohmed95% (59)
- Future Logic GEN2 Course UpdatedDocumento25 pagineFuture Logic GEN2 Course Updatedpablo bulzomiNessuna valutazione finora
- DocuCentre-III 3007 2007Documento44 pagineDocuCentre-III 3007 2007Andres Fitria Farrel0% (1)
- Premier C Technical 4817av2 PDFDocumento268 paginePremier C Technical 4817av2 PDFDrsetiawatiNessuna valutazione finora
- Woot16 Paper GrotheDocumento14 pagineWoot16 Paper GrotheelisaNessuna valutazione finora
- Technical Data: DescriptionDocumento4 pagineTechnical Data: DescriptionMiltongrimi GrimilNessuna valutazione finora
- Crucial m2 SSD Install Guide enDocumento5 pagineCrucial m2 SSD Install Guide enShumbla MolinaNessuna valutazione finora
- Introduction To Cisco RoutersDocumento64 pagineIntroduction To Cisco RouterssutharshanlkNessuna valutazione finora
- Electric Fuel Pump ChecklistDocumento11 pagineElectric Fuel Pump ChecklistIzz Bahar100% (1)
- Astm A307-14Documento6 pagineAstm A307-14Xamir Suarez Alejandro100% (2)