Potrebbero piacerti anche
- Multi-plane rotor balancing and misalignment estimationv are the unknown foundationparameters. The forces are grouped into a vector f asDocumento6 pagineMulti-plane rotor balancing and misalignment estimationv are the unknown foundationparameters. The forces are grouped into a vector f aspeach5Nessuna valutazione finora
- Estimating Unbalance and Misalignment of A Exible Rotating Machine From A Single Run-DownDocumento23 pagineEstimating Unbalance and Misalignment of A Exible Rotating Machine From A Single Run-DownDinuJoseNessuna valutazione finora
- Fast Flux Linkage Measurement For Switched Reluctance Motors Excluding Rotor Clamping Devices and Position SensorsDocumento7 pagineFast Flux Linkage Measurement For Switched Reluctance Motors Excluding Rotor Clamping Devices and Position SensorsLalbahadur MajhiNessuna valutazione finora
- Comparison of Experimental Observations in Rotating Machines With Simple Mathematical SimulationsDocumento27 pagineComparison of Experimental Observations in Rotating Machines With Simple Mathematical SimulationsYasirNessuna valutazione finora
- Nonlinear Dynamics: A Primer Modeling The Jeffcott Rotor (Campos 2005)Documento7 pagineNonlinear Dynamics: A Primer Modeling The Jeffcott Rotor (Campos 2005)mohdsolihat1Nessuna valutazione finora
- Rotordynamic Modeling Using Bond Graphs: Modeling The Jeffcott RotorDocumento7 pagineRotordynamic Modeling Using Bond Graphs: Modeling The Jeffcott Rotorchetan_thakur4278Nessuna valutazione finora
- Rotordynamic Modeling Using Bond Graphs: Modeling The Jeffcott RotorDocumento7 pagineRotordynamic Modeling Using Bond Graphs: Modeling The Jeffcott Rotorchetan_thakur4278Nessuna valutazione finora
- 2 UnbalancedDocumento5 pagine2 UnbalancedAnonymous 1kSjOqIhNessuna valutazione finora
- Wind Dfig Paper PDFDocumento10 pagineWind Dfig Paper PDFShraddha VardikarNessuna valutazione finora
- Ho2010 Result of RotorDocumento4 pagineHo2010 Result of RotorIraqi stormNessuna valutazione finora
- DumasCaroCherifGarnierFuret Robotica2011 HALDocumento20 pagineDumasCaroCherifGarnierFuret Robotica2011 HALf1f2f3f4f5cruzNessuna valutazione finora
- Modelling and Analysis of Squirrel Cage Induction Motor With Leading Reactive Power InjectionDocumento28 pagineModelling and Analysis of Squirrel Cage Induction Motor With Leading Reactive Power InjectionMostafadarwishNessuna valutazione finora
- Comparative Analysis of Linear and Non-Linear Extended State Observer With Application To Motion ControlDocumento7 pagineComparative Analysis of Linear and Non-Linear Extended State Observer With Application To Motion ControlNikhil MishraNessuna valutazione finora
- Condition Monitoring and Faults Diagnosis For Synchronous Generator Using Neural NetworksDocumento9 pagineCondition Monitoring and Faults Diagnosis For Synchronous Generator Using Neural NetworksMk AlshaearNessuna valutazione finora
- A New Speed Observer For Control System of Induction MotorDocumento6 pagineA New Speed Observer For Control System of Induction MotorTadele TegegneNessuna valutazione finora
- Applied Sciences: Experimental Analysis of The Dynamic Sti Industrial RobotsDocumento14 pagineApplied Sciences: Experimental Analysis of The Dynamic Sti Industrial RobotsPRATEEK BAJPAINessuna valutazione finora
- Modeling, Parameter Measurement and Sensorless Speed Estimation of IPM Synchronous Generator For Direct Drive Variable Speed Wind Turbine ApplicationDocumento17 pagineModeling, Parameter Measurement and Sensorless Speed Estimation of IPM Synchronous Generator For Direct Drive Variable Speed Wind Turbine ApplicationLawiii KkkNessuna valutazione finora
- Ijireeice 123 PDFDocumento6 pagineIjireeice 123 PDFUpama DasNessuna valutazione finora
- Stator-Interturn-Fault Detection of Doubly Fed Induction Generators Using Rotor-Current and Search-Coil-Voltage Signature AnalysisDocumento12 pagineStator-Interturn-Fault Detection of Doubly Fed Induction Generators Using Rotor-Current and Search-Coil-Voltage Signature AnalysisSaad ChakkorNessuna valutazione finora
- SensorlessSlowdown IEEE-EnCv24-1 2009Documento8 pagineSensorlessSlowdown IEEE-EnCv24-1 2009DineshkumarrrrNessuna valutazione finora
- Journal-Neural Network Based Terminal Sliding Mode Control For WMRs Affected by An Augmented Ground Friction With Slippage EffectDocumento9 pagineJournal-Neural Network Based Terminal Sliding Mode Control For WMRs Affected by An Augmented Ground Friction With Slippage EffectPham ThuanNessuna valutazione finora
- Winding Distribution Effects On Inductio PDFDocumento9 pagineWinding Distribution Effects On Inductio PDFfares noureddineNessuna valutazione finora
- Model Updating of Rotating Machinery for Vibration AnalysisDocumento12 pagineModel Updating of Rotating Machinery for Vibration Analysispalash22Nessuna valutazione finora
- A Simple Method To Determine Double-Cage Rotor Equivalent Circuit Parameters of Induction Motors From No-Load and Locked-Rotor TestsDocumento10 pagineA Simple Method To Determine Double-Cage Rotor Equivalent Circuit Parameters of Induction Motors From No-Load and Locked-Rotor TestsmastNessuna valutazione finora
- 2010 Kenne Ieee CSTDocumento7 pagine2010 Kenne Ieee CSTramiyaminNessuna valutazione finora
- The Counterbalance Design of The Articulated Robot ArmsDocumento4 pagineThe Counterbalance Design of The Articulated Robot ArmsRenato Azevedo Cossich FurtadoNessuna valutazione finora
- Bodson - Chiasson - Induction Motor Via Input-Output LinearDocumento9 pagineBodson - Chiasson - Induction Motor Via Input-Output LinearmorilloatilioNessuna valutazione finora
- Simulation by Composite ModelDocumento8 pagineSimulation by Composite Modelanshgarg786Nessuna valutazione finora
- Requirements For An Aerospace Actuation System Derived From The Control Design Point of ViewDocumento8 pagineRequirements For An Aerospace Actuation System Derived From The Control Design Point of ViewKarad KaradiasNessuna valutazione finora
- Effect of Radial Magnetic Forces in Permanent Magnetic Motors With Rotor EccentricityDocumento3 pagineEffect of Radial Magnetic Forces in Permanent Magnetic Motors With Rotor EccentricitylNessuna valutazione finora
- Vibration Prediction in Switched Reluctance Motors With Transfer Function Identification From Shaker and Force Hammer TestsDocumento8 pagineVibration Prediction in Switched Reluctance Motors With Transfer Function Identification From Shaker and Force Hammer TestsKaran ShahNessuna valutazione finora
- Dynamic Model Analysis of Three Phase Induction Motor Using Matlab SimulinkDocumento6 pagineDynamic Model Analysis of Three Phase Induction Motor Using Matlab SimulinkSuhail Ahmad SuhailNessuna valutazione finora
- Control of BLDC Motor For Satellite Mome PDFDocumento15 pagineControl of BLDC Motor For Satellite Mome PDFharshithreddyNessuna valutazione finora
- Calculation of Inductances of Induction Machines Under Axial Non-Uniformity ConditionsDocumento6 pagineCalculation of Inductances of Induction Machines Under Axial Non-Uniformity ConditionsWahyu Kunto WibowoNessuna valutazione finora
- Zhang 2009Documento4 pagineZhang 2009dankorankoNessuna valutazione finora
- MATLAB Simulation of Induction Machine With Saturable Leakage and Magnetizing InductancesDocumento11 pagineMATLAB Simulation of Induction Machine With Saturable Leakage and Magnetizing InductancesAid ZekolliNessuna valutazione finora
- Design and Analysis of General Rotor-Flux-Oriented Vector Control SystemsDocumento8 pagineDesign and Analysis of General Rotor-Flux-Oriented Vector Control SystemsLeonardo Solis ZamoraNessuna valutazione finora
- CFD Method Calculates Seal Rotordynamic CoefficientsDocumento12 pagineCFD Method Calculates Seal Rotordynamic CoefficientsBa1313yNessuna valutazione finora
- Challenges of Finite Element Analysis of Resolvers: Hamid Saneie Zahra Nasiri-GheidariDocumento11 pagineChallenges of Finite Element Analysis of Resolvers: Hamid Saneie Zahra Nasiri-GheidarilfbNessuna valutazione finora
- Performance of The Brushless Doubly-Fed Machine Under Normal and Fault ConditionsDocumento7 paginePerformance of The Brushless Doubly-Fed Machine Under Normal and Fault ConditionsmmrNessuna valutazione finora
- 2021-Chipato,Friswell-Nonlinear Rotordynamics of a MDOF rotor-statorDocumento18 pagine2021-Chipato,Friswell-Nonlinear Rotordynamics of a MDOF rotor-statorAlex CooperNessuna valutazione finora
- RamasamyAHSF13 Corrected2Documento23 pagineRamasamyAHSF13 Corrected2kalina.jovanovskiNessuna valutazione finora
- Li 2014Documento5 pagineLi 2014Aritra DasguptaNessuna valutazione finora
- Sarma 1979Documento3 pagineSarma 1979Iraqi stormNessuna valutazione finora
- Alsaleh2020 Article ExperimentalAndTheoreticalInve PDFDocumento9 pagineAlsaleh2020 Article ExperimentalAndTheoreticalInve PDFSamiUllahNessuna valutazione finora
- Work RDDS IEL 11923455 622b3fbedc0c6Documento6 pagineWork RDDS IEL 11923455 622b3fbedc0c6LIU LINessuna valutazione finora
- Robust Real-Time Control of A Two-Rotor Aerodynamic SystemDocumento6 pagineRobust Real-Time Control of A Two-Rotor Aerodynamic SystemsaeedNessuna valutazione finora
- Negative Sequence Losses in Turbine Generator Rotors: Christopher P. RileyDocumento5 pagineNegative Sequence Losses in Turbine Generator Rotors: Christopher P. RileyLeticia AlmeidaNessuna valutazione finora
- Current-Based Slippage Detection and Odometry Correction For Mobile Robots and Planetary RoversDocumento13 pagineCurrent-Based Slippage Detection and Odometry Correction For Mobile Robots and Planetary RoversKerry SunNessuna valutazione finora
- Arindam Seminar 11Documento6 pagineArindam Seminar 11Arindam BhattacharjeeNessuna valutazione finora
- Application of Bourgoyne and Young ROP Model To A Presalt Case Study. Mathematical Problems in EngineeringDocumento10 pagineApplication of Bourgoyne and Young ROP Model To A Presalt Case Study. Mathematical Problems in EngineeringChinedu NwabuezeNessuna valutazione finora
- Parameter Estimation For Induction Machines Based On Sensitivity AnalysisDocumento6 pagineParameter Estimation For Induction Machines Based On Sensitivity AnalysisRoberto SuNessuna valutazione finora
- FluxDocumento6 pagineFluxDobai SzilardNessuna valutazione finora
- Joint Stiffnessidentificationofsix-RevoluteindustrialserialrobotsDocumento8 pagineJoint Stiffnessidentificationofsix-RevoluteindustrialserialrobotsDark LordNessuna valutazione finora
- Complex Vector Model of The Squirrel-Cage Induction Machine Including Instantaneous Rotor Bar CurrentsDocumento9 pagineComplex Vector Model of The Squirrel-Cage Induction Machine Including Instantaneous Rotor Bar CurrentsAdil AbouelhassanNessuna valutazione finora
- Inverse Dynamics Based Altitude/Attitude Control and Stabilization of A Quadrotor UAVDocumento5 pagineInverse Dynamics Based Altitude/Attitude Control and Stabilization of A Quadrotor UAVashebir berhanuNessuna valutazione finora
- Integrated Imaging of the Earth: Theory and ApplicationsDa EverandIntegrated Imaging of the Earth: Theory and ApplicationsMax MoorkampNessuna valutazione finora
- Robot Manipulators: Modeling, Performance Analysis and ControlDa EverandRobot Manipulators: Modeling, Performance Analysis and ControlNessuna valutazione finora
- Modern Practice in Servo Design: International Series of Monographs in Electrical EngineeringDa EverandModern Practice in Servo Design: International Series of Monographs in Electrical EngineeringValutazione: 5 su 5 stelle5/5 (1)
- Bearing PreloadDocumento1 paginaBearing PreloadvinayakNessuna valutazione finora
- Bearing PreloadDocumento1 paginaBearing PreloadvinayakNessuna valutazione finora
- Break-Away Torque CalculationDocumento3 pagineBreak-Away Torque CalculationJay PatelNessuna valutazione finora
- Oil Immersed Vacuum PumpsDocumento2 pagineOil Immersed Vacuum PumpsJay PatelNessuna valutazione finora
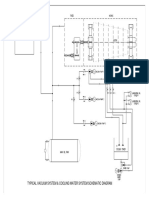
- Vacuum & Cooling System DiagramDocumento1 paginaVacuum & Cooling System DiagramJay PatelNessuna valutazione finora
- Multi Plane Balancing of A Rotating Machine Using Run-Down DataDocumento6 pagineMulti Plane Balancing of A Rotating Machine Using Run-Down DataJay PatelNessuna valutazione finora
- Manager - Advanced Quality Control Engineering Large Motor and Generator Department General Electric Company Schenectady, New YorkDocumento8 pagineManager - Advanced Quality Control Engineering Large Motor and Generator Department General Electric Company Schenectady, New YorkJay PatelNessuna valutazione finora
- Balancing Basic Part IDocumento14 pagineBalancing Basic Part IJay PatelNessuna valutazione finora
- Manager - Advanced Quality Control Engineering Large Motor and Generator Department General Electric Company Schenectady, New YorkDocumento8 pagineManager - Advanced Quality Control Engineering Large Motor and Generator Department General Electric Company Schenectady, New YorkJay PatelNessuna valutazione finora
- Multi Plane Balancing of A Rotating Machine Using Run-Down DataDocumento6 pagineMulti Plane Balancing of A Rotating Machine Using Run-Down DataJay PatelNessuna valutazione finora
- Oil Immersed Vacuum PumpsDocumento2 pagineOil Immersed Vacuum PumpsJay PatelNessuna valutazione finora
- Manager - Advanced Quality Control Engineering Large Motor and Generator Department General Electric Company Schenectady, New YorkDocumento8 pagineManager - Advanced Quality Control Engineering Large Motor and Generator Department General Electric Company Schenectady, New YorkJay PatelNessuna valutazione finora
- Multi Plane Balancing of A Rotating Machine Using Run-Down DataDocumento6 pagineMulti Plane Balancing of A Rotating Machine Using Run-Down DataJay PatelNessuna valutazione finora
- Balancing Using The Influence Coefficients Method: FFT LeakageDocumento4 pagineBalancing Using The Influence Coefficients Method: FFT LeakageJay PatelNessuna valutazione finora
- Impulse TurbineDocumento11 pagineImpulse TurbineSubayyal IlyasNessuna valutazione finora
- Weight Removal Formula For SteelDocumento1 paginaWeight Removal Formula For SteelJay PatelNessuna valutazione finora
- ED009 - Approved Training CoursesDocumento3 pagineED009 - Approved Training CoursesJay PatelNessuna valutazione finora
- Single Plane Balancing PDFDocumento23 pagineSingle Plane Balancing PDFdaveNessuna valutazione finora
- PF Transfer Process Flow - EmployeesDocumento9 paginePF Transfer Process Flow - Employeesgopi226Nessuna valutazione finora
- TurbinesDocumento8 pagineTurbinesShivam MehtaNessuna valutazione finora
- Drill Bit Sizes and LengthsDocumento1 paginaDrill Bit Sizes and LengthsJay PatelNessuna valutazione finora
- Big SST - Overview PDFDocumento15 pagineBig SST - Overview PDFJay PatelNessuna valutazione finora
- 19730005750Documento124 pagine19730005750Jay PatelNessuna valutazione finora
- TurbineDocumento8 pagineTurbineJay Patel100% (1)
- The Color of Runout: ApplicationsDocumento14 pagineThe Color of Runout: ApplicationsWangunNessuna valutazione finora
- Balancing Using The Influence Coefficients Method: FFT LeakageDocumento4 pagineBalancing Using The Influence Coefficients Method: FFT LeakageJay PatelNessuna valutazione finora
- Validation Report On The 2-Phase Line SizingDocumento18 pagineValidation Report On The 2-Phase Line SizingEbby Onyekwe100% (1)
- Effect of Acoustic Vibration On The Satellite Structure at Launch StageDocumento146 pagineEffect of Acoustic Vibration On The Satellite Structure at Launch StageAbsaACNessuna valutazione finora
- LPS Project Manager: User's Guide November 2009Documento476 pagineLPS Project Manager: User's Guide November 2009luizfernandosNessuna valutazione finora
- Motion Class 9 NotesDocumento15 pagineMotion Class 9 NotesBavan Deep100% (1)
- Undestanding Assembly LanguageDocumento28 pagineUndestanding Assembly LanguageSuhas Rohit Pai100% (1)
- MA60002 Data Structure and Algorithms (Bhakt)Documento2 pagineMA60002 Data Structure and Algorithms (Bhakt)Gaurav KumarNessuna valutazione finora
- Dm2 Ch4 AutomataDocumento38 pagineDm2 Ch4 AutomataPham Hoai VanNessuna valutazione finora
- Simulation of Crack Propagation in API 5L X52 Pressurized Pipes Using XFEM-Based Cohesive Segment ApproachDocumento15 pagineSimulation of Crack Propagation in API 5L X52 Pressurized Pipes Using XFEM-Based Cohesive Segment ApproachAmmarul NafikNessuna valutazione finora
- Sample Paper-At-2324-Class-Vii-P1-At+pcbmDocumento23 pagineSample Paper-At-2324-Class-Vii-P1-At+pcbmnirmal krisnaNessuna valutazione finora
- Kinetics of Ester Hydrolysis NewDocumento3 pagineKinetics of Ester Hydrolysis Newbits_who_am_iNessuna valutazione finora
- Vlastakis ScienceDocumento4 pagineVlastakis ScienceAnonymous 4O5p5xK2OBNessuna valutazione finora
- Diagnostic Test Elementary Mathematics 6 SY 2015-2016: Paombong Central SchoolDocumento5 pagineDiagnostic Test Elementary Mathematics 6 SY 2015-2016: Paombong Central SchoolEvalyn M. SalvaNessuna valutazione finora
- Polar Coordinates and Complex Numbers ChapterDocumento34 paginePolar Coordinates and Complex Numbers ChapterFran LeeNessuna valutazione finora
- A Level MathematicsDocumento28 pagineA Level MathematicsHassaan Memon100% (1)
- Math 6 - Contextualized Lesson PlanDocumento4 pagineMath 6 - Contextualized Lesson Planlk venturaNessuna valutazione finora
- 2D Transformations in Computer GraphicsDocumento32 pagine2D Transformations in Computer GraphicsIAGPLSNessuna valutazione finora
- Development and Validation of An Internationally Reliable Short-Form of The Positive and Negative Affect Schedule (PANAS)Documento16 pagineDevelopment and Validation of An Internationally Reliable Short-Form of The Positive and Negative Affect Schedule (PANAS)aldemar reyes alvisNessuna valutazione finora
- Classification of Control SystemsDocumento15 pagineClassification of Control SystemsMohankumar V.Nessuna valutazione finora
- Remarksonmulti FidelitysurrogatesDocumento23 pagineRemarksonmulti FidelitysurrogateskkaytugNessuna valutazione finora
- GCSE Mathematics 1F MSDocumento13 pagineGCSE Mathematics 1F MSMIhaela CorcheNessuna valutazione finora
- FIR FilterDocumento32 pagineFIR FilterWan TingNessuna valutazione finora
- MiniTest 230304Documento2 pagineMiniTest 230304Osama MaherNessuna valutazione finora
- 19ce159 C++Documento23 pagine19ce159 C++kalpana yadavNessuna valutazione finora
- The Rhind PapyrusDocumento5 pagineThe Rhind PapyrusVictor QuezadaNessuna valutazione finora
- Section 8.2: Monte Carlo Estimation: Discrete-Event Simulation: A First CourseDocumento19 pagineSection 8.2: Monte Carlo Estimation: Discrete-Event Simulation: A First CoursessfofoNessuna valutazione finora
- 2 Quarter Pacing Guide 2012-2013Documento4 pagine2 Quarter Pacing Guide 2012-2013api-31926103Nessuna valutazione finora
- Unidrive M700-M701 and M702 Control UG Issue 2 (0478-0353-02) - ApprovedDocumento286 pagineUnidrive M700-M701 and M702 Control UG Issue 2 (0478-0353-02) - Approvednorbert0% (1)
- Physics Module 2 SummaryDocumento13 paginePhysics Module 2 SummaryJessica JamesNessuna valutazione finora
- Machine Learning: An Introduction to Predicting the Future from Past ExperienceDocumento65 pagineMachine Learning: An Introduction to Predicting the Future from Past ExperienceAnilNessuna valutazione finora
- Table of Contents and Basic Hydraulic PrinciplesDocumento6 pagineTable of Contents and Basic Hydraulic Principleskawser zamanNessuna valutazione finora