Potrebbero piacerti anche
- Simulado Avionica - AnacDocumento93 pagineSimulado Avionica - AnacCarlyson Silva100% (1)
- Teorema militar hidrodinâmicaDocumento12 pagineTeorema militar hidrodinâmicaGiovanni SeverinoNessuna valutazione finora
- Analise de Energia EletricaDocumento60 pagineAnalise de Energia EletricaCarlyson SilvaNessuna valutazione finora
- Bateria de chumbo-ácido: componentes e funçõesDocumento26 pagineBateria de chumbo-ácido: componentes e funçõesCarlyson SilvaNessuna valutazione finora
- GeoJeca - Geometria EspacialDocumento67 pagineGeoJeca - Geometria EspacialValdirene M. Ferreira100% (3)
- Questões de Cinemática - (CURSINHO PRÉ-EnEM) - Professor HenriqueDocumento6 pagineQuestões de Cinemática - (CURSINHO PRÉ-EnEM) - Professor HenriqueThaina RiosNessuna valutazione finora
- Lista de Exercícios: soluções - Unidade 3 - Osciladores harmônicosDocumento18 pagineLista de Exercícios: soluções - Unidade 3 - Osciladores harmônicosRicardo Negri0% (2)
- Vínculos tridimensionais e equilíbrio de corpos rígidosDocumento0 pagineVínculos tridimensionais e equilíbrio de corpos rígidosJosé BritesNessuna valutazione finora
- Baseado No Regulamento de Segurança Contra Incêndios Das Edificações e Áreas de Risco Do Estado de São PauloDocumento3 pagineBaseado No Regulamento de Segurança Contra Incêndios Das Edificações e Áreas de Risco Do Estado de São PauloCarlyson Silva100% (1)
- Estudo de Protecao - SE 15kVDocumento23 pagineEstudo de Protecao - SE 15kVLucas BatistaNessuna valutazione finora
- Geometria Analítica e Álgebra Linear - IpemigDocumento74 pagineGeometria Analítica e Álgebra Linear - IpemigMarcos José LohnNessuna valutazione finora
- Como calcular poligonal fechadaDocumento4 pagineComo calcular poligonal fechadaVinicius Alves0% (1)
- Projeto 1 - EleMaq1Documento8 pagineProjeto 1 - EleMaq1Julia Belarmino100% (1)
- Teste - 5A - Cap1 2 3 4 5 6Documento7 pagineTeste - 5A - Cap1 2 3 4 5 6Mauro SimõesNessuna valutazione finora
- InstruGeralCaracConsInstruVooDocumento39 pagineInstruGeralCaracConsInstruVooCarlyson SilvaNessuna valutazione finora
- Exercicios Resolvidos - Capitulo 5 e 6Documento88 pagineExercicios Resolvidos - Capitulo 5 e 6Pro Civitate DeiNessuna valutazione finora
- Sólidos GeométricosDocumento4 pagineSólidos GeométricosMara GomesNessuna valutazione finora
- Forças internas e diagramas de esforçoDocumento58 pagineForças internas e diagramas de esforçoJocirlei FelicioNessuna valutazione finora
- Matemática 9o ano teste marçoDocumento8 pagineMatemática 9o ano teste marçoMaria MagnoNessuna valutazione finora
- Resolução de Exercícios Carregamento AxialDocumento13 pagineResolução de Exercícios Carregamento AxialVitor Batista da Cruz92% (12)
- Cuadro de Formulas de Área y Perímetro de Figuras PlanasDocumento2 pagineCuadro de Formulas de Área y Perímetro de Figuras PlanasHECTOR YAIR MEZA VERANessuna valutazione finora
- Lista de exercícios de cinemática com soluçõesDocumento8 pagineLista de exercícios de cinemática com soluçõesRick AlbertNessuna valutazione finora
- GEODÉSIA E SISTEMAS DE REFERÊNCIADocumento110 pagineGEODÉSIA E SISTEMAS DE REFERÊNCIAHerendy Silva100% (1)
- Matemática 7o ano teste diagnósticoDocumento4 pagineMatemática 7o ano teste diagnósticoArlete PereiraNessuna valutazione finora
- Força e EquilíbrioDocumento8 pagineForça e EquilíbrioAlexandre PrudencioNessuna valutazione finora
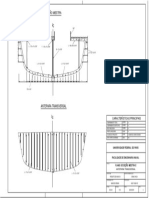
- Dona Chica - Plano de Seção Mestra e Ant - TransDocumento1 paginaDona Chica - Plano de Seção Mestra e Ant - TransMarcos RenanNessuna valutazione finora
- Paulo Flores e JCPC - Cinemática de Mecanismos Cap 3Documento25 paginePaulo Flores e JCPC - Cinemática de Mecanismos Cap 3Antonio Henrique MNessuna valutazione finora
- Prova de Hidrodinâmica do Navio com Questões sobre Manobras e CavitaçãoDocumento6 pagineProva de Hidrodinâmica do Navio com Questões sobre Manobras e CavitaçãoMatheus FazziNessuna valutazione finora
- Gabarito G1 PO 2017.2Documento4 pagineGabarito G1 PO 2017.2Fábio MaiaNessuna valutazione finora
- Trabalho de Ondas e ÓpticaDocumento3 pagineTrabalho de Ondas e ÓpticacamillaportsmannNessuna valutazione finora
- Algebra Matricial PDFDocumento74 pagineAlgebra Matricial PDFdanielNessuna valutazione finora
- Ficha de Exercícios ProbabilidadeDocumento7 pagineFicha de Exercícios ProbabilidadedadosNessuna valutazione finora
- Propriedades geométricas de áreasDocumento7 paginePropriedades geométricas de áreasNilson Haruo MutoNessuna valutazione finora
- Curvas HidrostáticasDocumento34 pagineCurvas HidrostáticasHarerton DouradoNessuna valutazione finora
- MA1 ExerciciosAulasPraticasDocumento22 pagineMA1 ExerciciosAulasPraticaswellingtonjuaNessuna valutazione finora
- Exercicios Resolvidos de CIV 105 PDFDocumento118 pagineExercicios Resolvidos de CIV 105 PDFJoão de OliveiraNessuna valutazione finora
- Primeira Lista de Exercícios - Mecânica GeralDocumento5 paginePrimeira Lista de Exercícios - Mecânica GeralFrancisco JúniorNessuna valutazione finora
- Lista de Exercícios MEC1Documento19 pagineLista de Exercícios MEC1Darlene PereiraNessuna valutazione finora
- Exercícios de Mecânica Dos FluidosDocumento2 pagineExercícios de Mecânica Dos FluidosWalker MatheusNessuna valutazione finora
- Exercícios de Cinemática PDFDocumento10 pagineExercícios de Cinemática PDF149162536Nessuna valutazione finora
- Cálculo da quantidade mínima de carga a descarregar para adequar o calado de um navioDocumento2 pagineCálculo da quantidade mínima de carga a descarregar para adequar o calado de um naviojean BuasNessuna valutazione finora
- Lista3 Equilibrio PDFDocumento6 pagineLista3 Equilibrio PDFPedro SchuchterNessuna valutazione finora
- Equações de Bernoulli em sistemas de fluidosDocumento4 pagineEquações de Bernoulli em sistemas de fluidosDenis DinizNessuna valutazione finora
- Exercicios ResolvidosDocumento6 pagineExercicios ResolvidosIcaro UlissesNessuna valutazione finora
- 3 Ano QuimicaDocumento8 pagine3 Ano QuimicaAlex Ferreira LeiteNessuna valutazione finora
- Geometria e Velocidades do Motor a Combustão InternaDocumento36 pagineGeometria e Velocidades do Motor a Combustão InternaElias BerbettyNessuna valutazione finora
- Movimentos de Rotação e TranslaçãoDocumento9 pagineMovimentos de Rotação e Translaçãolp4.ambientalNessuna valutazione finora
- Apostila de Matemática DiscretaDocumento23 pagineApostila de Matemática DiscretaHeber Amauri Augusto MotaNessuna valutazione finora
- Aplicações das leis de Newton - 10 exercíciosDocumento31 pagineAplicações das leis de Newton - 10 exercíciosJessica CorreiaNessuna valutazione finora
- Mecanismo para conversão de movimento rotativo contínuo em alternadoDocumento29 pagineMecanismo para conversão de movimento rotativo contínuo em alternadoChefiaNessuna valutazione finora
- Torção-Teoria e ExreciciosDocumento19 pagineTorção-Teoria e ExreciciosThiago Fernando Dos SantosNessuna valutazione finora
- Prova de Mecânica Geral AV2Documento6 pagineProva de Mecânica Geral AV2Luiz OrcatoNessuna valutazione finora
- LabNum 2019 v3Documento98 pagineLabNum 2019 v3Iveson SavioNessuna valutazione finora
- Atividade 4 - Pesquisa Operacional - 54-2023Documento5 pagineAtividade 4 - Pesquisa Operacional - 54-2023Cavalini Assessoria AcadêmicaNessuna valutazione finora
- Questões Sobre Diodo Boylestad Cap IDocumento9 pagineQuestões Sobre Diodo Boylestad Cap Ityrone pinheiroNessuna valutazione finora
- Questões Do Mabie Exemplo 4Documento7 pagineQuestões Do Mabie Exemplo 4Lucas MarceloNessuna valutazione finora
- Exerc+¡cios Sobre Plano Inclinado Com AtritoDocumento6 pagineExerc+¡cios Sobre Plano Inclinado Com AtritoLuKasRCNessuna valutazione finora
- Trabalho 1 Mecânica Dos Sólidos Eng. Produção Linha Verde 2016 02Documento9 pagineTrabalho 1 Mecânica Dos Sólidos Eng. Produção Linha Verde 2016 02DaianeNessuna valutazione finora
- Estática ponto materialDocumento9 pagineEstática ponto materialSamuel Henrique Granero DianinNessuna valutazione finora
- Fisica Leis de Newton e AtritoDocumento31 pagineFisica Leis de Newton e Atritomarcos rodriguesNessuna valutazione finora
- Fichamento MecgeralDocumento34 pagineFichamento MecgeralRodrigo Mota0% (1)
- Prova Cfaq 2013 PDFDocumento6 pagineProva Cfaq 2013 PDFValdecy RogérioNessuna valutazione finora
- Forças e Pressões em Equilíbrio MecânicoDocumento3 pagineForças e Pressões em Equilíbrio MecânicoRui MoreiraNessuna valutazione finora
- Blocos PDFDocumento2 pagineBlocos PDFBira VieiraNessuna valutazione finora
- Matemática - Aula 07 - Funções de 1° e 2° GrausDocumento13 pagineMatemática - Aula 07 - Funções de 1° e 2° GrausMatemática Mathclassy100% (5)
- Sistema Biela Manivela: Vetores Aceleração dos Elos AB e BCDocumento2 pagineSistema Biela Manivela: Vetores Aceleração dos Elos AB e BCJames Amorim100% (1)
- Tutorial Maxsurf IIDocumento2 pagineTutorial Maxsurf IIFlavio MoraesNessuna valutazione finora
- Apostila Fisica Aplicada À EngenhariaDocumento81 pagineApostila Fisica Aplicada À EngenhariaAllecxsNessuna valutazione finora
- Sistemas de Referência - Descrição Por Posição e OrientaçãoDocumento13 pagineSistemas de Referência - Descrição Por Posição e OrientaçãoThiago MaiaNessuna valutazione finora
- Biomecânica para Fisioterapeutas - 69pDocumento69 pagineBiomecânica para Fisioterapeutas - 69pivanfersantosNessuna valutazione finora
- Física Aplicada - Vetores, Forças e EquilíbrioDocumento79 pagineFísica Aplicada - Vetores, Forças e EquilíbrioRogerio MottaNessuna valutazione finora
- Lista de Exercicios Produto VetorialDocumento8 pagineLista de Exercicios Produto VetorialJosé AntonioNessuna valutazione finora
- Cinemtica Do Movimento Plano de Um Corpo RgidoDocumento39 pagineCinemtica Do Movimento Plano de Um Corpo RgidoMARCOS PAULO RODRIGUES PRONUNCIATENessuna valutazione finora
- 00 - Resumo Da AulaDocumento48 pagine00 - Resumo Da AulaCarlyson SilvaNessuna valutazione finora
- Helicópteros Airbus comunicação remoçãoDocumento1 paginaHelicópteros Airbus comunicação remoçãoCarlyson SilvaNessuna valutazione finora
- BalanceamentoDocumento15 pagineBalanceamentoCarlyson SilvaNessuna valutazione finora
- Curso Iso 50001Documento2 pagineCurso Iso 50001Carlyson SilvaNessuna valutazione finora
- AS355 009.00.01 - MCS 34-25-09-001 (WD - Conf 002) - H321 Standby Gyro HorizonDocumento1 paginaAS355 009.00.01 - MCS 34-25-09-001 (WD - Conf 002) - H321 Standby Gyro HorizonCarlyson SilvaNessuna valutazione finora
- Partes fixas micrômetroDocumento217 paginePartes fixas micrômetroCarlyson SilvaNessuna valutazione finora
- Avaliação de Geração IDocumento5 pagineAvaliação de Geração ICarlyson SilvaNessuna valutazione finora
- Avaliação 1: Questionário sobre manutençõesDocumento6 pagineAvaliação 1: Questionário sobre manutençõesCarlyson SilvaNessuna valutazione finora
- Atividade PosDocumento5 pagineAtividade PosCarlyson SilvaNessuna valutazione finora
- (Dropsmart + Olympos) TOP 10 PRODUTOSDocumento24 pagine(Dropsmart + Olympos) TOP 10 PRODUTOSCarlyson SilvaNessuna valutazione finora
- Submódulo 11.3 - Rev - 1.0Documento11 pagineSubmódulo 11.3 - Rev - 1.0viniciusschnellNessuna valutazione finora
- Laudo técnico SPDA e aterramento condomínioDocumento2 pagineLaudo técnico SPDA e aterramento condomínioCarlyson SilvaNessuna valutazione finora
- Submódulo 11.1 - Rev - 1.0Documento4 pagineSubmódulo 11.1 - Rev - 1.0Thiago Breno Menezes da SilvaNessuna valutazione finora
- Exercício de Eletricidade Básica 1Documento24 pagineExercício de Eletricidade Básica 1Carlyson SilvaNessuna valutazione finora
- Avaliação 1 Online com Questões MúltiplasDocumento3 pagineAvaliação 1 Online com Questões MúltiplasCarlyson SilvaNessuna valutazione finora
- Modelo de Proposta de ServiçoDocumento4 pagineModelo de Proposta de ServiçoCarlyson SilvaNessuna valutazione finora
- Proteção Sistemas Elétricos ApostilaDocumento6 pagineProteção Sistemas Elétricos ApostilaPaulo Henrique TavaresNessuna valutazione finora
- Nível de Proteção IDocumento1 paginaNível de Proteção ICarlyson SilvaNessuna valutazione finora
- 27 Grandezas Elétricas VetoriaisDocumento27 pagine27 Grandezas Elétricas VetoriaisCarlyson SilvaNessuna valutazione finora
- Circuitos elétricos e aviônicaDocumento128 pagineCircuitos elétricos e aviônicaCarlyson SilvaNessuna valutazione finora
- Nível de Proteção IDocumento1 paginaNível de Proteção ICarlyson SilvaNessuna valutazione finora
- PAP021953Documento8 paginePAP021953Carlyson SilvaNessuna valutazione finora
- Guia EM Da NBR 5410Documento3 pagineGuia EM Da NBR 5410Bruno KnischewskiNessuna valutazione finora
- Calculadora para AutonomosDocumento1 paginaCalculadora para AutonomosCarlyson SilvaNessuna valutazione finora
- Tema 07-1 - Trac3a7ado em Planta - Sobrelevacao e SobrelarguraDocumento20 pagineTema 07-1 - Trac3a7ado em Planta - Sobrelevacao e SobrelarguraElïsé Natchipal GomesNessuna valutazione finora
- Matematica 9ano Trilha 7semanaDocumento9 pagineMatematica 9ano Trilha 7semanaKarin FiorelliNessuna valutazione finora
- Lista de Exercícios de Álgebra LinearDocumento5 pagineLista de Exercícios de Álgebra LinearRayander Martins PimentaNessuna valutazione finora
- Avaliação 3 Bimestre Matematica Recuperação 8anoDocumento4 pagineAvaliação 3 Bimestre Matematica Recuperação 8anoMichel RodriguesNessuna valutazione finora
- Recuperação de Física Do 3º Ano. 1º Bi.Documento3 pagineRecuperação de Física Do 3º Ano. 1º Bi.ceciliamunizNessuna valutazione finora
- Capitulo 6 - Medidas de Assimetria e CurtoseDocumento6 pagineCapitulo 6 - Medidas de Assimetria e CurtoseShelzia Rafael CossaNessuna valutazione finora
- Identidades TrigonométricasDocumento13 pagineIdentidades TrigonométricasCristiano MarquesNessuna valutazione finora
- Visão do positivismo e suas regrasDocumento3 pagineVisão do positivismo e suas regrasJeanNessuna valutazione finora
- Lista Mínima-G.E.-Mod3-Aula 3 - PrismasDocumento5 pagineLista Mínima-G.E.-Mod3-Aula 3 - PrismasDaniele JuvinoNessuna valutazione finora
- Prova C 2014 SoluoesDocumento10 pagineProva C 2014 SoluoesWylsoa AraújoNessuna valutazione finora
- Prova de Matemática do IFPA com 60 questões objetivasDocumento6 pagineProva de Matemática do IFPA com 60 questões objetivasPaulo MartinsNessuna valutazione finora
- Continuidade e Números IrracionaisDocumento14 pagineContinuidade e Números Irracionaisjuze márioNessuna valutazione finora
- 1 Derivada Introdução+RegrasDocumento18 pagine1 Derivada Introdução+RegrasTiago AlbuquerqueNessuna valutazione finora
- Calculo de Perímetro e Área de Figuras PlanasDocumento5 pagineCalculo de Perímetro e Área de Figuras PlanasLenderson Francisco Pedro José Souza da SilvaNessuna valutazione finora
- Trombeta de Gabriel Ou TorritheliDocumento5 pagineTrombeta de Gabriel Ou TorrithelipedroNessuna valutazione finora
- Exame Nacional: Sucessões, Geometria, Funções e ProbabilidadesDocumento2 pagineExame Nacional: Sucessões, Geometria, Funções e ProbabilidadesZé OtávioNessuna valutazione finora
- INTENSIVÃO ENEM - Revisão COMPLETA de Matemática - Professor Fredão (v2)Documento24 pagineINTENSIVÃO ENEM - Revisão COMPLETA de Matemática - Professor Fredão (v2)Lucas FaeddaNessuna valutazione finora
- Encontro de dois móveis em movimento retilíneo uniformeDocumento24 pagineEncontro de dois móveis em movimento retilíneo uniformeJoao CarvalhoNessuna valutazione finora
- Material de Apoio Matemática - 3Documento5 pagineMaterial de Apoio Matemática - 3Camila CastanhoNessuna valutazione finora
- A Teoria Historico Cultural e o Ensino Aprendizagem em MatemáticaDocumento6 pagineA Teoria Historico Cultural e o Ensino Aprendizagem em MatemáticaMarina FilierNessuna valutazione finora
- Características geométricas, esforços externos e diagramas de tensões internasDocumento43 pagineCaracterísticas geométricas, esforços externos e diagramas de tensões internasandre duarteNessuna valutazione finora