Potrebbero piacerti anche
- Electrical Load Calculations for Building ConstructionDocumento16 pagineElectrical Load Calculations for Building ConstructionKitz DerechoNessuna valutazione finora
- A Study of Biomass Briquette in BangladeshDocumento97 pagineA Study of Biomass Briquette in BangladeshPamela Nicole ManaloNessuna valutazione finora
- Controlled Variable Manipulated Variable Controlle R Type /scheme Gproms Model/Process NameDocumento5 pagineControlled Variable Manipulated Variable Controlle R Type /scheme Gproms Model/Process NameJoseph OrjiNessuna valutazione finora
- A0750320021-Wiring Diagrams and Component LocationsDocumento1.619 pagineA0750320021-Wiring Diagrams and Component Locationsbrettblb67% (6)
- Control StrategyDocumento44 pagineControl StrategyAyunie FazlinNessuna valutazione finora
- H815 Design of All-Plywood BeamsDocumento29 pagineH815 Design of All-Plywood BeamsbabshuagNessuna valutazione finora
- 909 User Manual Rev H PDFDocumento354 pagine909 User Manual Rev H PDFRemiel Zapata GNessuna valutazione finora
- Failure Pump ShaftDocumento7 pagineFailure Pump Shaftahmedabdelaziz851647100% (1)
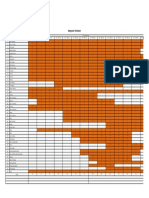
- Manpower Schedule ProjectDocumento1 paginaManpower Schedule ProjectColitz D. KhenNessuna valutazione finora
- Introduction To Process InstrumentationDocumento15 pagineIntroduction To Process Instrumentationtaufikrezza85Nessuna valutazione finora
- PNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGDa EverandPNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGNessuna valutazione finora
- Petronas Chemical MTBE Internship ReportDocumento51 paginePetronas Chemical MTBE Internship ReportAnonymous T7vjZG4otNessuna valutazione finora
- Troubleshooting Process Plant Control: A Practical Guide to Avoiding and Correcting MistakesDa EverandTroubleshooting Process Plant Control: A Practical Guide to Avoiding and Correcting MistakesValutazione: 1 su 5 stelle1/5 (2)
- Level Flow Plant ControlDocumento9 pagineLevel Flow Plant ControlAmanina HakimNessuna valutazione finora
- Temperature Control LabDocumento16 pagineTemperature Control Labhoocheeleong234100% (1)
- Lab Report Process Control - Flow MeasurementDocumento23 pagineLab Report Process Control - Flow Measurementcleytonmarques1991100% (1)
- Pid Tuning ClassicalDocumento18 paginePid Tuning ClassicalVo Quang HuyNessuna valutazione finora
- Automatic Controllers & Control ModesDocumento74 pagineAutomatic Controllers & Control ModesVishal IyerNessuna valutazione finora
- Supply Chain Management: Author: B. Mahadevan Operations Management: Theory and Practice, 3eDocumento31 pagineSupply Chain Management: Author: B. Mahadevan Operations Management: Theory and Practice, 3eAjmal sNessuna valutazione finora
- B1 - Liquid Level Control SystemDocumento17 pagineB1 - Liquid Level Control Systemmoon star angelNessuna valutazione finora
- Process Control Lab ReportDocumento23 pagineProcess Control Lab ReportAnonymous OWdJRM8C100% (1)
- BEUMER Apron Conveyors 01kjdecxsedDocumento12 pagineBEUMER Apron Conveyors 01kjdecxsedGeorge Lapusneanu100% (1)
- CPB30004 Process Dynamics and Control Experiment 1: Level Flow Cascade Process Control Lab ReportDocumento8 pagineCPB30004 Process Dynamics and Control Experiment 1: Level Flow Cascade Process Control Lab ReportSiti Hajar Mohamed100% (5)
- Selection, Installation and Maintenance of Electrical Apparatus for Hazardous LocationsDocumento29 pagineSelection, Installation and Maintenance of Electrical Apparatus for Hazardous Locationskieran43100% (1)
- Lab Report PDC Gas PressureDocumento9 pagineLab Report PDC Gas PressureHaziq AzliNessuna valutazione finora
- Controller Tuning Methods for PID LoopsDocumento5 pagineController Tuning Methods for PID LoopsSubham SikdarNessuna valutazione finora
- CPB30004 Process Dynamics and Control Experiment 2: Liquid Flow Ratio Process Control Lab ReportDocumento11 pagineCPB30004 Process Dynamics and Control Experiment 2: Liquid Flow Ratio Process Control Lab ReportSiti Hajar Mohamed100% (1)
- Process Control ExperimentDocumento10 pagineProcess Control ExperimentYasserAbyNessuna valutazione finora
- Lab Report Ratio ControlDocumento14 pagineLab Report Ratio ControlNesha Arasu100% (1)
- Ratio Control ReportDocumento14 pagineRatio Control ReportKoi Zi KangNessuna valutazione finora
- Lab Report Ratio ControlDocumento15 pagineLab Report Ratio Controlnaneesa_1100% (8)
- Objective of The StudyDocumento9 pagineObjective of The StudyFnur FatihahNessuna valutazione finora
- Air Flow Result DiscussionDocumento9 pagineAir Flow Result DiscussionAzura BahrudinNessuna valutazione finora
- ConclusionDocumento2 pagineConclusionMuhd AzimNessuna valutazione finora
- PROCEDUREDocumento1 paginaPROCEDURESour DuckNessuna valutazione finora
- EXP 4 - Full Report 1Documento22 pagineEXP 4 - Full Report 1SUGIE ANAK BAKINessuna valutazione finora
- Intro Theory Level FlowDocumento5 pagineIntro Theory Level FlowAzura BahrudinNessuna valutazione finora
- In For MeDocumento11 pagineIn For MePenedorado ChichiplateadoNessuna valutazione finora
- Level Flow PCDocumento10 pagineLevel Flow PCMurali TharanNessuna valutazione finora
- Control Exp RohitDocumento9 pagineControl Exp RohitrohitNessuna valutazione finora
- Experiment 1 - Process Control RigDocumento15 pagineExperiment 1 - Process Control Rigzimbabwe100Nessuna valutazione finora
- Two tank non-interacting liquid level PID controlDocumento9 pagineTwo tank non-interacting liquid level PID controlHimanshu JatNessuna valutazione finora
- 2018Ch85 - Pressure Controller FInal LabDocumento12 pagine2018Ch85 - Pressure Controller FInal LabAdeel AbbasNessuna valutazione finora
- Process Control Systems Precisely Regulate Liquids and GasesDocumento3 pagineProcess Control Systems Precisely Regulate Liquids and GasesDanialAzimNessuna valutazione finora
- Open Loop TestDocumento5 pagineOpen Loop TestClarence Billy BijugNessuna valutazione finora
- Effect of Changing Set Points To The Controllability of Flow and Mass Flow ControlDocumento11 pagineEffect of Changing Set Points To The Controllability of Flow and Mass Flow ControlWan IzdiharNessuna valutazione finora
- PID Control Implementation in Multiple Input and Multiple Output (MIMO) Water Mixing Tank Via Ziegler-Nichols and Direct Synthesis MethodsDocumento5 paginePID Control Implementation in Multiple Input and Multiple Output (MIMO) Water Mixing Tank Via Ziegler-Nichols and Direct Synthesis MethodsbijejournalNessuna valutazione finora
- Mukriz: PV (What Is PV?)Documento5 pagineMukriz: PV (What Is PV?)Mukriz MahaderNessuna valutazione finora
- Lab Che 239 Liquid Flow G5Documento9 pagineLab Che 239 Liquid Flow G5Muhd FirdausNessuna valutazione finora
- اخررررر تعديلDocumento10 pagineاخررررر تعديلAhmed nawfalNessuna valutazione finora
- Report ControlDocumento33 pagineReport Controlajwadalfatani100% (5)
- Pci Lab Manual (2) StudentDocumento67 paginePci Lab Manual (2) StudentTewodros AsfawNessuna valutazione finora
- Basic Process ControlDocumento38 pagineBasic Process ControlBoris bryan AletanuNessuna valutazione finora
- Expt. 4 - Pressure ControlDocumento16 pagineExpt. 4 - Pressure Controlpleco4meNessuna valutazione finora
- Modelling Level Control and Transient Behavior of Proportional LoopsDocumento13 pagineModelling Level Control and Transient Behavior of Proportional LoopsKarishma GobinNessuna valutazione finora
- Level Control in Horizontal Tank by Fuzzy Controller: Satean and Santi Wangnipparnto2 'DepartmentDocumento4 pagineLevel Control in Horizontal Tank by Fuzzy Controller: Satean and Santi Wangnipparnto2 'DepartmentvndhilmechNessuna valutazione finora
- Lab Report Liquid FlowDocumento17 pagineLab Report Liquid Flow9xqyk4dpwbNessuna valutazione finora
- Process ControlDocumento21 pagineProcess ControlJamie ForsythNessuna valutazione finora
- Exp - P6 - Temperature ControlDocumento10 pagineExp - P6 - Temperature ControlSiddesh PatilNessuna valutazione finora
- Lab ReportDocumento13 pagineLab ReportHemal MenukaNessuna valutazione finora
- Conical Exp 8Documento7 pagineConical Exp 8Mohd RehanNessuna valutazione finora
- Updated CS Unit 2Documento12 pagineUpdated CS Unit 2gchinnaNessuna valutazione finora
- Performance of Different Control Strategies For Boiler Drum Level Control Using LabVIEWDocumento4 paginePerformance of Different Control Strategies For Boiler Drum Level Control Using LabVIEWpriyam saikiaNessuna valutazione finora
- Industrial Process ControlDocumento22 pagineIndustrial Process Controlmariamxx93Nessuna valutazione finora
- Series and Parallel Pumps: Flow Rate & PressureDocumento11 pagineSeries and Parallel Pumps: Flow Rate & PressureKevin Devastian100% (1)
- Advanced Control StrategiesDocumento6 pagineAdvanced Control StrategiesHugo EGNessuna valutazione finora
- Effect of Changing Set Points To The Controllability of Flow and Mass Flow ControlDocumento10 pagineEffect of Changing Set Points To The Controllability of Flow and Mass Flow ControlWan IzdiharNessuna valutazione finora
- Loop kontrol aliran (proporsional): 7.3.3 Praktek 3Documento4 pagineLoop kontrol aliran (proporsional): 7.3.3 Praktek 3pebiNessuna valutazione finora
- TminDocumento17 pagineTminhanaNessuna valutazione finora
- Chapter 4Documento38 pagineChapter 4Anonymous T7vjZG4otNessuna valutazione finora
- Waste Collection PointDocumento19 pagineWaste Collection PointAnonymous T7vjZG4otNessuna valutazione finora
- Malaysian Institute of Chemical and Bioengineering TechnologyDocumento2 pagineMalaysian Institute of Chemical and Bioengineering TechnologyAnonymous T7vjZG4otNessuna valutazione finora
- Individual Assignment A1 Engineering Technologist in Society Clb40002Documento13 pagineIndividual Assignment A1 Engineering Technologist in Society Clb40002Anonymous T7vjZG4otNessuna valutazione finora
- 1.1 Catalytic Oxidation of SO To SO: Apodaca, 2012Documento9 pagine1.1 Catalytic Oxidation of SO To SO: Apodaca, 2012Farah Talib Al-sudaniNessuna valutazione finora
- Report Equipment DesignDocumento2 pagineReport Equipment DesignAnonymous T7vjZG4otNessuna valutazione finora
- Current Technologist Challenges and Achievements: What Do You Think?Documento4 pagineCurrent Technologist Challenges and Achievements: What Do You Think?Anonymous T7vjZG4otNessuna valutazione finora
- Laboratory Report Cover Page (50%)Documento1 paginaLaboratory Report Cover Page (50%)Anonymous T7vjZG4otNessuna valutazione finora
- RESULT and Discussion.Documento4 pagineRESULT and Discussion.Anonymous T7vjZG4otNessuna valutazione finora
- Exercise 2 Principles of ProgrammingDocumento1 paginaExercise 2 Principles of ProgrammingAnonymous T7vjZG4otNessuna valutazione finora
- Graph HeatDocumento5 pagineGraph HeatAnonymous T7vjZG4otNessuna valutazione finora
- Experiment ESPDocumento8 pagineExperiment ESPAnonymous T7vjZG4otNessuna valutazione finora
- Justification: Why Double Contact Process Is Most Suitable For Sulfuric Acid ProductionDocumento1 paginaJustification: Why Double Contact Process Is Most Suitable For Sulfuric Acid ProductionAnonymous T7vjZG4otNessuna valutazione finora
- RBDDocumento2 pagineRBDAnonymous T7vjZG4otNessuna valutazione finora
- Current Technologist Challenges and Achievements: What Do You Think?Documento4 pagineCurrent Technologist Challenges and Achievements: What Do You Think?Anonymous T7vjZG4otNessuna valutazione finora
- 3 TUTORIAL 3 Hazard IdentificationDocumento3 pagine3 TUTORIAL 3 Hazard IdentificationAnonymous T7vjZG4otNessuna valutazione finora
- Effects of Catalyst Characters On The Photocatalytic Activity and Process of Nio Nanoparticles in The Degradation of Methylene BlueDocumento7 pagineEffects of Catalyst Characters On The Photocatalytic Activity and Process of Nio Nanoparticles in The Degradation of Methylene BlueAnonymous T7vjZG4otNessuna valutazione finora
- Individual Assignment A1 Engineering Technologist in Society Clb40002Documento13 pagineIndividual Assignment A1 Engineering Technologist in Society Clb40002Anonymous T7vjZG4otNessuna valutazione finora
- Current Technologist Challenges and Achievements: What Do You Think?Documento4 pagineCurrent Technologist Challenges and Achievements: What Do You Think?Anonymous T7vjZG4otNessuna valutazione finora
- Individual Assignment A1 Engineering Technologist in Society Clb40002Documento13 pagineIndividual Assignment A1 Engineering Technologist in Society Clb40002Anonymous T7vjZG4otNessuna valutazione finora
- CPB 30103 Biochemical Engineering (July)Documento8 pagineCPB 30103 Biochemical Engineering (July)Anonymous T7vjZG4otNessuna valutazione finora
- SafetyDocumento1 paginaSafetyAnonymous T7vjZG4otNessuna valutazione finora
- Water Technology Tool Paper Final PDFDocumento18 pagineWater Technology Tool Paper Final PDFAnonymous T7vjZG4otNessuna valutazione finora
- Inside The Wind TurbineDocumento1 paginaInside The Wind TurbineAnonymous T7vjZG4otNessuna valutazione finora
- (C) Laboratory Report SubmissionDocumento2 pagine(C) Laboratory Report SubmissionAnonymous T7vjZG4otNessuna valutazione finora
- Methods / Procedures: List of ChemicalsDocumento3 pagineMethods / Procedures: List of ChemicalsAnonymous T7vjZG4otNessuna valutazione finora
- IntroductionDocumento3 pagineIntroductionAnonymous T7vjZG4otNessuna valutazione finora
- SafetyDocumento1 paginaSafetyAnonymous T7vjZG4otNessuna valutazione finora
- Low GWP Refrigerants for Marine Cold RoomsDocumento18 pagineLow GWP Refrigerants for Marine Cold RoomsDirt FilterNessuna valutazione finora
- Quinti 2017 LRDocumento167 pagineQuinti 2017 LRpipradoNessuna valutazione finora
- Anclas ASTM A307-2007B PDFDocumento6 pagineAnclas ASTM A307-2007B PDFeGnEsToMcNessuna valutazione finora
- Aquagroup PumpsDocumento2 pagineAquagroup PumpsBarwin CruzNessuna valutazione finora
- Dexter Axles Light-Duty-600-8k - (Lit-001-00)Documento99 pagineDexter Axles Light-Duty-600-8k - (Lit-001-00)gearhead1Nessuna valutazione finora
- Xc800 App OcdsDocumento22 pagineXc800 App OcdskrrishNessuna valutazione finora
- Furniture Design ProposalDocumento46 pagineFurniture Design ProposalIvneet VohraNessuna valutazione finora
- Diagrama Flujo Toschi MarioDocumento1 paginaDiagrama Flujo Toschi MariomariofnmNessuna valutazione finora
- Specification For Approval: DC FanDocumento10 pagineSpecification For Approval: DC FanbertsmithNessuna valutazione finora
- MAXGRIPDocumento1 paginaMAXGRIPjchessaNessuna valutazione finora
- DCS Black Shark Ka-50 Keyboard MinilistDocumento1 paginaDCS Black Shark Ka-50 Keyboard MinilistMichiel ErasmusNessuna valutazione finora
- Atomic 4 Parts ListDocumento72 pagineAtomic 4 Parts ListRobertNessuna valutazione finora
- Io s4.6 en 0407Documento2 pagineIo s4.6 en 0407Vasudev AgrawalNessuna valutazione finora
- sb0007t11 P0741Documento5 paginesb0007t11 P0741Huguito DiazNessuna valutazione finora
- TA-250 & TA-300: Installation and ManualDocumento26 pagineTA-250 & TA-300: Installation and ManualjodseedNessuna valutazione finora
- Assignment IDocumento2 pagineAssignment IShivpreet SharmaNessuna valutazione finora
- Test Results: Supreeth Raghuprakash, Hai Le Dang, Steven Engelen, Bert MonnaDocumento1 paginaTest Results: Supreeth Raghuprakash, Hai Le Dang, Steven Engelen, Bert MonnafidoruckNessuna valutazione finora
- MTL Product OverviewDocumento56 pagineMTL Product OverviewAries dNessuna valutazione finora
- Emcore en 150 1 3 5 ImuDocumento2 pagineEmcore en 150 1 3 5 Imuachmad fitrio spnNessuna valutazione finora
- Ministry of Physical Infrastructure DevelopmentDocumento25 pagineMinistry of Physical Infrastructure DevelopmentrahulNessuna valutazione finora