Potrebbero piacerti anche
- Movimiento Plano Restringido en Formato ApaDocumento13 pagineMovimiento Plano Restringido en Formato ApaCarlomagnoBautistoOrtizNessuna valutazione finora
- Movimiento Plano Restringido en Formato ApaDocumento14 pagineMovimiento Plano Restringido en Formato ApaJ Angel GonzalezNessuna valutazione finora
- Movimiento Plano DinamicaDocumento15 pagineMovimiento Plano DinamicaJonathan Lopez ChangNessuna valutazione finora
- Dinámica de MaterialesDocumento19 pagineDinámica de MaterialesEsteban GonzalezNessuna valutazione finora
- 1 3 1Documento18 pagine1 3 1Carlos JiménezNessuna valutazione finora
- Tema 04Documento11 pagineTema 04Harold AlexanderNessuna valutazione finora
- Inv Individual CINETICA DE CUERPOS RIGIDOSDocumento21 pagineInv Individual CINETICA DE CUERPOS RIGIDOSJose Francisco Valdez BautistaNessuna valutazione finora
- 4 Cinetica RigidosbDocumento31 pagine4 Cinetica RigidosbJean Carlos VillegasNessuna valutazione finora
- Rejunte de Parciales Prácticos - MRDocumento26 pagineRejunte de Parciales Prácticos - MRrodrigo cicuttoNessuna valutazione finora
- Determinación Del Momento de Inercia de MasaDocumento6 pagineDeterminación Del Momento de Inercia de MasaJaime L. ReyesNessuna valutazione finora
- Impulso y Cantidad de Movimiento de Cuerpos RigidosDocumento23 pagineImpulso y Cantidad de Movimiento de Cuerpos Rigidosbily jhander felix velardeNessuna valutazione finora
- Informe Momento de Inercia RampasDocumento3 pagineInforme Momento de Inercia Rampasfelipe santos sanchezNessuna valutazione finora
- Solucionario Taller 6Documento4 pagineSolucionario Taller 6Paula PerezNessuna valutazione finora
- Tarea 4 M.A.S Pendulo SimpleDocumento11 pagineTarea 4 M.A.S Pendulo Simplenicolmart591Nessuna valutazione finora
- PRACTICA VIII Practica de Inercia RotacionalDocumento8 paginePRACTICA VIII Practica de Inercia RotacionalVictor Hernandez100% (1)
- Análisis Del Sistema Masa Del ResorteDocumento19 pagineAnálisis Del Sistema Masa Del ResorteAlexander Picon FabianNessuna valutazione finora
- Practica Final de Dinamica 2Documento6 paginePractica Final de Dinamica 2Fabian UgarteNessuna valutazione finora
- UA2. Material 2. Cantidad de Movimiento LinealDocumento14 pagineUA2. Material 2. Cantidad de Movimiento LinealFABIO CÉSAR MORENO LÓPEZNessuna valutazione finora
- Dinamica 1Documento42 pagineDinamica 1Joel50% (2)
- Movimiento Periódico - Osciladores ArmónicosDocumento53 pagineMovimiento Periódico - Osciladores ArmónicosAnonymous BF3SHZ3pKNessuna valutazione finora
- Trabajo Mas 2020-01Documento2 pagineTrabajo Mas 2020-01CARLOS MONTOYANessuna valutazione finora
- Trabajo MasDocumento2 pagineTrabajo MasCien Rojas0% (1)
- Sesion 5 - 2020Documento22 pagineSesion 5 - 2020Michael ObrayanNessuna valutazione finora
- Tarea 01Documento4 pagineTarea 01jimenaNessuna valutazione finora
- Diapositivas DinámicaDocumento75 pagineDiapositivas DinámicaEnriquez IvanNessuna valutazione finora
- Movimiento RotacionalDocumento59 pagineMovimiento RotacionalGustavoBurgos67% (3)
- Practica 6 Lab DinamicaDocumento25 paginePractica 6 Lab DinamicaDebray GonzalezNessuna valutazione finora
- Tercer Trabajo MonograficoDocumento18 pagineTercer Trabajo MonograficoVictor MoralesNessuna valutazione finora
- Movimiento Plano de Cuerpos RígidosDocumento12 pagineMovimiento Plano de Cuerpos RígidosALBERTO AYALA COAGUILA100% (2)
- Cinética Tridimensional de Un Cuerpo RigidoDocumento47 pagineCinética Tridimensional de Un Cuerpo RigidoDanielAlexisHuamanTitoNessuna valutazione finora
- Dinamica Unidad 2Documento13 pagineDinamica Unidad 2Ricardo SotoNessuna valutazione finora
- Laboratorio de InerciaDocumento7 pagineLaboratorio de InerciaOmar Salazar RuizNessuna valutazione finora
- Laboratorio Momento de Inercia y Aceleracion Angular PDFDocumento18 pagineLaboratorio Momento de Inercia y Aceleracion Angular PDFHenry ANessuna valutazione finora
- Exp 7 Fis 2 TrimDocumento5 pagineExp 7 Fis 2 TrimCristian Jallo CruzNessuna valutazione finora
- Trabajo MasDocumento2 pagineTrabajo MasNathalie Arce100% (2)
- Trabajo Autónomo 4Documento7 pagineTrabajo Autónomo 4JorgeNessuna valutazione finora
- Dinamica de RotacionDocumento17 pagineDinamica de RotacionbenjaNessuna valutazione finora
- Unidad 4 DinamicaDocumento20 pagineUnidad 4 DinamicaAdrian GuerraNessuna valutazione finora
- Practica #1 y #2 Resorte Vibraciones MecanicasDocumento14 paginePractica #1 y #2 Resorte Vibraciones MecanicasJonathan Zepeda SanchezNessuna valutazione finora
- Dinámica de RotaciónDocumento23 pagineDinámica de RotaciónarondickllamobaiqueNessuna valutazione finora
- 2018 01 Fii Semana 01 Sesin 2Documento25 pagine2018 01 Fii Semana 01 Sesin 2Vanessa FalconNessuna valutazione finora
- H17 - Dinámica Del Sólido RígidoDocumento3 pagineH17 - Dinámica Del Sólido RígidoEmily PerezNessuna valutazione finora
- RE-10-LAB-086 FISICA II v9Documento57 pagineRE-10-LAB-086 FISICA II v9Emely TkdNessuna valutazione finora
- Tercera Unidad DinamicaDocumento19 pagineTercera Unidad DinamicaVictor TntNessuna valutazione finora
- TallerDocumento3 pagineTallerLuis Miguel Molina GaleanoNessuna valutazione finora
- 1.2 Momento de Inercia, Teorema de Los Ejes Paralelos, TorcaDocumento13 pagine1.2 Momento de Inercia, Teorema de Los Ejes Paralelos, TorcaBELLO AMORNessuna valutazione finora
- Análisis de Dinámico de Los EMADocumento51 pagineAnálisis de Dinámico de Los EMAPablo Aragon0Nessuna valutazione finora
- S14 s2 MaterialDocumento21 pagineS14 s2 MaterialJairoNessuna valutazione finora
- Ejercicios MasDocumento2 pagineEjercicios MasNathalie ArceNessuna valutazione finora
- Diapos Semana11Documento33 pagineDiapos Semana11Diana ChavezNessuna valutazione finora
- Proyecto Final (Dinámica)Documento30 pagineProyecto Final (Dinámica)Joselyn GissellNessuna valutazione finora
- Momento AngularDocumento21 pagineMomento AngularJhonatan CauroNessuna valutazione finora
- S02.s1 - CAF3-2023-ARCHIVODocumento22 pagineS02.s1 - CAF3-2023-ARCHIVOAdriana Alexandra Tataje AllccaNessuna valutazione finora
- Investigacion Apa Unidad 2Documento15 pagineInvestigacion Apa Unidad 2Jonathan RodriguezNessuna valutazione finora
- Informe Evaluacion 20% Ra Mecanica AplciadaDocumento8 pagineInforme Evaluacion 20% Ra Mecanica AplciadaRuben Alejandro Rondon UzcateguiNessuna valutazione finora
- 14-Sistemas OscilantesDocumento3 pagine14-Sistemas Oscilantesf114arqNessuna valutazione finora
- Dinamica de Un Cuerpo Rigido InformeDocumento9 pagineDinamica de Un Cuerpo Rigido InformeLesly David0% (1)
- Guía para el análisis y solución de problemas de resistencia de materialesDa EverandGuía para el análisis y solución de problemas de resistencia de materialesNessuna valutazione finora
- Triptico Estados FinancierosDocumento2 pagineTriptico Estados FinancierosLuis Enrique Persye Watzon100% (1)
- Formato Apa BugiDocumento18 pagineFormato Apa BugiLuis Enrique Persye WatzonNessuna valutazione finora
- Cuadro ComparativoDocumento2 pagineCuadro ComparativoLuis Enrique Persye WatzonNessuna valutazione finora
- 2 FTPEP Ficha Técnica Proyectos Entidades y Dep. Pub. - DonativosDocumento2 pagine2 FTPEP Ficha Técnica Proyectos Entidades y Dep. Pub. - DonativosLuis Enrique Persye Watzon100% (2)
- Proyecto de Sistema de RiegoDocumento49 pagineProyecto de Sistema de RiegoLuis Enrique Persye Watzon100% (1)
- F - Arrancadores Magneticos A Voltaje Reducido PDFDocumento1 paginaF - Arrancadores Magneticos A Voltaje Reducido PDFLuis Enrique Persye WatzonNessuna valutazione finora
- La ResidenciaDocumento2 pagineLa ResidenciaLuis Enrique Persye WatzonNessuna valutazione finora
- Unidad I Maquinas de Fluidos Compresibles.Documento42 pagineUnidad I Maquinas de Fluidos Compresibles.Luis Enrique Persye WatzonNessuna valutazione finora
- Format Oapa General 3Documento18 pagineFormat Oapa General 3Luis Enrique Persye WatzonNessuna valutazione finora
- Problemas de TornillosDocumento4 pagineProblemas de TornillosLuis Enrique Persye WatzonNessuna valutazione finora
- Clemencia Gomez: Total $1,149.01Documento2 pagineClemencia Gomez: Total $1,149.01Ruben RangelNessuna valutazione finora
- Densidad y PrecisiónDocumento9 pagineDensidad y PrecisiónKristiam AlvarezNessuna valutazione finora
- P3: P3: Cuando La Corriente Del Compresor Inverter Sea Superior A 12 A, El Sistema Mostrará La Protección P3 ODU en Modo de EsperaDocumento1 paginaP3: P3: Cuando La Corriente Del Compresor Inverter Sea Superior A 12 A, El Sistema Mostrará La Protección P3 ODU en Modo de EsperaJORGE LUMBRERASNessuna valutazione finora
- Reporte Practica de ArmónicosDocumento6 pagineReporte Practica de ArmónicosIsaac MedinaNessuna valutazione finora
- PROYECTO DE CALCULOcorregidoDocumento11 paginePROYECTO DE CALCULOcorregidoAlexander ArboledaNessuna valutazione finora
- Trabajo de Fisica Semana 4Documento6 pagineTrabajo de Fisica Semana 4YORDY JARANessuna valutazione finora
- NPW45-12 Datasheet PDFDocumento2 pagineNPW45-12 Datasheet PDFRonald Victor Galarza HermitañoNessuna valutazione finora
- Conversion en Reactores No IdealesDocumento41 pagineConversion en Reactores No Idealesdavid100% (1)
- Solucionario Repaso Semana 6 - OficialDocumento14 pagineSolucionario Repaso Semana 6 - OficialDavid HernándezNessuna valutazione finora
- Magnitudes ProporcionaDocumento7 pagineMagnitudes ProporcionaAny Mary Borda Echavarria0% (1)
- Tarea Tema 5 AntenasDocumento7 pagineTarea Tema 5 AntenasCamila CondeNessuna valutazione finora
- Energía Mecanica Italo Cabascango 2 D 13-10-2023Documento5 pagineEnergía Mecanica Italo Cabascango 2 D 13-10-2023jv3282182Nessuna valutazione finora
- t7 Transformadores PDFDocumento20 paginet7 Transformadores PDFJorge Cabrera0% (1)
- Aire Acondicionado: Eficiencia ConsumoDocumento2 pagineAire Acondicionado: Eficiencia ConsumoMiguel RujasNessuna valutazione finora
- Informe de Laboratorio Calor Especifico de Los SolidosDocumento22 pagineInforme de Laboratorio Calor Especifico de Los Solidosretiforme85% (79)
- Radio Metacentrico - En.esDocumento2 pagineRadio Metacentrico - En.esChristian JulcamoroNessuna valutazione finora
- Guia 03 Ondas ElectromagneticasDocumento3 pagineGuia 03 Ondas ElectromagneticasJAMES DAVID VANSTRAHLEN MOLINA50% (2)
- Capítulo 6 Evaluacion de La FuerzaDocumento77 pagineCapítulo 6 Evaluacion de La FuerzaLuis Vásquez TelloNessuna valutazione finora
- Procedimiento Armado Mando Final D10T2Documento10 pagineProcedimiento Armado Mando Final D10T2Claudio MuñozNessuna valutazione finora
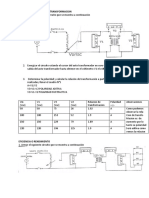
- Armar El Siguiente Circuito Que Se Muestra A ContinuaciónDocumento2 pagineArmar El Siguiente Circuito Que Se Muestra A ContinuaciónAnthony JaimeNessuna valutazione finora
- 9 RFT MDTDocumento29 pagine9 RFT MDTMitsúMilagrosToroSayasNessuna valutazione finora
- @procesada - S01 - 01 - Carga y Fuerza Eléctrica - HT - Wa PDFDocumento2 pagine@procesada - S01 - 01 - Carga y Fuerza Eléctrica - HT - Wa PDFAnonymous CoidT1yNessuna valutazione finora
- Cálculos Bandas V0.1Documento43 pagineCálculos Bandas V0.1gechaves1Nessuna valutazione finora
- Laboratorio Informe 2Documento11 pagineLaboratorio Informe 2JOEL EDGAR PALOMINO LIMAYLLANessuna valutazione finora
- Caida Libre Y Caída Con RoceDocumento15 pagineCaida Libre Y Caída Con RoceErnJoyNessuna valutazione finora
- Texto de Electricidad Basico PDFDocumento24 pagineTexto de Electricidad Basico PDFBenitez Marcos AtibenaNessuna valutazione finora
- Practica 9 (Sistema Hidraulico)Documento18 paginePractica 9 (Sistema Hidraulico)karina_ramirez_p3810Nessuna valutazione finora
- Guia de TP 3 - Perdida de Carga - CañeriasDocumento5 pagineGuia de TP 3 - Perdida de Carga - CañeriasJoaco CedresNessuna valutazione finora
- Problemas de HidrostaticaDocumento2 pagineProblemas de HidrostaticaGean Paul Bueno FernándezNessuna valutazione finora
- Primera y Segunda Ley para Sustancias PurasDocumento4 paginePrimera y Segunda Ley para Sustancias PurasAlejandro BriceñoNessuna valutazione finora