Potrebbero piacerti anche
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- F3 Maths 2012 1stexam Paper1Documento3 pagineF3 Maths 2012 1stexam Paper1YiuhangLeung100% (2)
- PDI Inspection Sheet EN PDFDocumento2 paginePDI Inspection Sheet EN PDFPatricio Cisternas100% (1)
- Elasto-Plastic Solution of Tunnel Problems Using The Generalized Form of The Hoek-Brown Failure CriterionDocumento11 pagineElasto-Plastic Solution of Tunnel Problems Using The Generalized Form of The Hoek-Brown Failure CriterionPatricio Cisternas100% (1)
- Risk Culture Assessment QuestionnaireDocumento3 pagineRisk Culture Assessment QuestionnairemohamedNessuna valutazione finora
- Conflict MangementDocumento35 pagineConflict Mangementmadhuri_bind100% (1)
- Rip Bushing PDFDocumento38 pagineRip Bushing PDFTravis Wood100% (1)
- GuidebugDocumento1 paginaGuidebugPatricio CisternasNessuna valutazione finora
- ParametrosDocumento123 pagineParametrosPatricio CisternasNessuna valutazione finora
- ReadmeDocumento2 pagineReadmePatricio CisternasNessuna valutazione finora
- IntroductionDocumento1 paginaIntroductionPatricio CisternasNessuna valutazione finora
- Readme!Documento1 paginaReadme!maria_santhosh_inigoNessuna valutazione finora
- Mit18 03scf11 FinalDocumento5 pagineMit18 03scf11 FinalswagonswagonswagNessuna valutazione finora
- Pozo 100 263Documento115 paginePozo 100 263Patricio CisternasNessuna valutazione finora
- Mechanical Response of Surrounding Rock of Tunnels Constructed With The TBM and Drill-Blasting MethodDocumento12 pagineMechanical Response of Surrounding Rock of Tunnels Constructed With The TBM and Drill-Blasting MethodPatricio CisternasNessuna valutazione finora
- Papers HoekDocumento1 paginaPapers HoekPatricio CisternasNessuna valutazione finora
- Mechanical Response of Surrounding Rock of Tunnels Constructed With The TBM and Drill-Blasting MethodDocumento12 pagineMechanical Response of Surrounding Rock of Tunnels Constructed With The TBM and Drill-Blasting MethodPatricio CisternasNessuna valutazione finora
- Lecture 18: Series Solution of Linear Differential Equations (Iii)Documento3 pagineLecture 18: Series Solution of Linear Differential Equations (Iii)Patricio CisternasNessuna valutazione finora
- Suggested ReadingsDocumento6 pagineSuggested ReadingsPatricio CisternasNessuna valutazione finora
- RQD and rock mass classification parametersDocumento2 pagineRQD and rock mass classification parametersPatricio CisternasNessuna valutazione finora
- Android - Read and Write To FileDocumento2 pagineAndroid - Read and Write To FilePatricio CisternasNessuna valutazione finora
- H1987 ADocumento18 pagineH1987 AMarkusMakuAldoNessuna valutazione finora
- Mining IntroductionDocumento9 pagineMining IntroductionpriyankaNessuna valutazione finora
- Reliable Support Design for Brittle Rock ExcavationsDocumento21 pagineReliable Support Design for Brittle Rock ExcavationsPatricio CisternasNessuna valutazione finora
- Fragblast: International Journal For Blasting and FragmentationDocumento20 pagineFragblast: International Journal For Blasting and FragmentationPatricio CisternasNessuna valutazione finora
- Frankfurt School taxes and ideology critiqueDocumento5 pagineFrankfurt School taxes and ideology critiqueErnesto BulnesNessuna valutazione finora
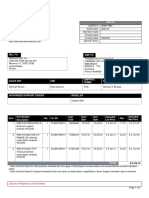
- Order Details for Order #10105Documento2 pagineOrder Details for Order #10105Mohamed HarbNessuna valutazione finora
- Spiros Styliaras: Devops EngineerDocumento2 pagineSpiros Styliaras: Devops EngineerΣπύρος ΣτυλιαράςNessuna valutazione finora
- Boyut AnaliziDocumento65 pagineBoyut AnaliziHasan Kayhan KayadelenNessuna valutazione finora
- Call For IPSF-EMRO Regional Working Group Subcommittees 2018-19Documento4 pagineCall For IPSF-EMRO Regional Working Group Subcommittees 2018-19IPSF EMRONessuna valutazione finora
- Filters in GeneralDocumento3 pagineFilters in GeneralJoseGarciaRuizNessuna valutazione finora
- MATHEMATICS Compulsory Part Paper 1: Question-Answer BookDocumento20 pagineMATHEMATICS Compulsory Part Paper 1: Question-Answer Booknicole wongNessuna valutazione finora
- ISSAQ: An Integrated Sensing Systems For Real-Time Indoor Air Quality MonitoringDocumento15 pagineISSAQ: An Integrated Sensing Systems For Real-Time Indoor Air Quality MonitoringKemHuyềnNessuna valutazione finora
- NASA: 2202main COL Debris Boeing 030121Documento9 pagineNASA: 2202main COL Debris Boeing 030121NASAdocumentsNessuna valutazione finora
- Critical Regionalism in ArchitectureDocumento75 pagineCritical Regionalism in ArchitecturebranishNessuna valutazione finora
- t-030f Spanish p35-48Documento4 paginet-030f Spanish p35-48Juan ContrerasNessuna valutazione finora
- Academic SummaryDocumento4 pagineAcademic SummaryJacqui PendergastNessuna valutazione finora
- DLT - Ate 2022Documento28 pagineDLT - Ate 2022chellep.uniNessuna valutazione finora
- Unsaturated Polyester Resins: Chemistry and Technology: Piotr Penczek (U) Piotr Czub Jan PielichowskiDocumento2 pagineUnsaturated Polyester Resins: Chemistry and Technology: Piotr Penczek (U) Piotr Czub Jan Pielichowskiae0011979Nessuna valutazione finora
- Scheme of Examination For Master of Computer APPLICATIONS (M.C.A.) W.E.F. Academic Session 2014-15Documento11 pagineScheme of Examination For Master of Computer APPLICATIONS (M.C.A.) W.E.F. Academic Session 2014-15Siddharth JainNessuna valutazione finora
- Willie Soon, Peter Frick, and Sallie BaliunasDocumento4 pagineWillie Soon, Peter Frick, and Sallie BaliunasMiguel CervantesNessuna valutazione finora
- Johnson RPM Chart Evinrude E-Tec RPM Chart Mercury 4-Stroke RPM ChartDocumento2 pagineJohnson RPM Chart Evinrude E-Tec RPM Chart Mercury 4-Stroke RPM ChartUlf NymanNessuna valutazione finora
- American Statistical AssociationDocumento7 pagineAmerican Statistical Associationmantu6kumar-17Nessuna valutazione finora
- AN-029Wired Locker Access Control ENDocumento13 pagineAN-029Wired Locker Access Control ENpetar petrovicNessuna valutazione finora
- Standards List July2019Documento8 pagineStandards List July2019Richard PNessuna valutazione finora
- Present Environment and Sustainable Development - Annual Review Report 2015Documento7 paginePresent Environment and Sustainable Development - Annual Review Report 2015catalinlungeanu758Nessuna valutazione finora
- Calibration Procedure Crowcon Xgard Gas Detectors - 5720273 - 01Documento16 pagineCalibration Procedure Crowcon Xgard Gas Detectors - 5720273 - 01Daniel Rolando Gutierrez FuentesNessuna valutazione finora
- Formative vs Reflective Measures of Organizational CoordinationDocumento20 pagineFormative vs Reflective Measures of Organizational Coordinationmasterling880% (1)
- Quote: Quotation Prepared By: Sloan SellersDocumento2 pagineQuote: Quotation Prepared By: Sloan SellersRubén CastañoNessuna valutazione finora
- Advisory Note 11 ASFP Cell Beam RationaleDocumento2 pagineAdvisory Note 11 ASFP Cell Beam RationalePavaloaie Marian ConstantinNessuna valutazione finora