Potrebbero piacerti anche
- Proyecto Alarma Contra LadronesDocumento5 pagineProyecto Alarma Contra LadronesDrago Leal0% (1)
- FIR-INF-922-121223 - R3 - Informe Sistemas de Bombeo - MuelleDocumento27 pagineFIR-INF-922-121223 - R3 - Informe Sistemas de Bombeo - MuelleOscar RhenalsNessuna valutazione finora
- GPCH Matadero ConejosDocumento91 pagineGPCH Matadero ConejosJorge GallardoNessuna valutazione finora
- Sistemas Operativos ModernosDocumento6 pagineSistemas Operativos ModernosJorge Gomez MendozaNessuna valutazione finora
- Tercer EntregaDocumento71 pagineTercer EntregaCarlos RobayoNessuna valutazione finora
- Articles-266578 R Ejecutivo InstitucionalDocumento101 pagineArticles-266578 R Ejecutivo InstitucionalLore SNessuna valutazione finora
- Guia - Laboratorio - HH223-2020-2 Ing CastilloDocumento30 pagineGuia - Laboratorio - HH223-2020-2 Ing CastilloMiguel Angel GamarraNessuna valutazione finora
- Modelo de Proyecto PDFDocumento45 pagineModelo de Proyecto PDFFernando YepezNessuna valutazione finora
- Lab 10 - Programación y Control de Un Tanque - Control PIDDocumento23 pagineLab 10 - Programación y Control de Un Tanque - Control PIDMabel Cesia Surco PanibraNessuna valutazione finora
- GuIA PLANOS ELECTRICOS 1601022Documento7 pagineGuIA PLANOS ELECTRICOS 1601022alejandro pintoNessuna valutazione finora
- Pág. Agradecimientos: Programa de Análisis, Asesoramiento Y Actuación para La Modificación de Conducta Programa 3ADocumento2 paginePág. Agradecimientos: Programa de Análisis, Asesoramiento Y Actuación para La Modificación de Conducta Programa 3APancho Sanchez DiazNessuna valutazione finora
- Guia TF3282 2016Documento114 pagineGuia TF3282 2016Saraid Estefania Figueroa RuizNessuna valutazione finora
- Control y Regulación Industrial I - 2018 2022Documento4 pagineControl y Regulación Industrial I - 2018 2022Ariel Cahuaya TNessuna valutazione finora
- Manual LBDocumento119 pagineManual LBTHALIA MILAGROS MERMA CABRERANessuna valutazione finora
- 9 Regulacion IndustrialDocumento4 pagine9 Regulacion IndustrialAlexis Emilhy CamachoNessuna valutazione finora
- RetrieveDocumento131 pagineRetrievetop22.23davidNessuna valutazione finora
- Procedimiento Montaje de Bombas Verticales CCS-MPO-7.5Documento24 pagineProcedimiento Montaje de Bombas Verticales CCS-MPO-7.5Jose Flores50% (2)
- Instrumentacion y SensoresDocumento27 pagineInstrumentacion y SensoresFRANCHESCOLI GUIDO CRUZ ALVAREZNessuna valutazione finora
- Laboratorio 3. Aplicacionesdiodos - 17500Documento3 pagineLaboratorio 3. Aplicacionesdiodos - 17500xabenavides1Nessuna valutazione finora
- Proyecto 551493 551494Documento67 pagineProyecto 551493 551494Jimmy Jhon Fernandez ZavaletaNessuna valutazione finora
- Nicanor Raul Benites Saravia - FieeDocumento5 pagineNicanor Raul Benites Saravia - FieeWalther CJNessuna valutazione finora
- Tunel de Viento - Felipe - AcevedoVelez - 2006 PDFDocumento150 pagineTunel de Viento - Felipe - AcevedoVelez - 2006 PDFOrion 777Nessuna valutazione finora
- Trabajo de GradoDocumento100 pagineTrabajo de Gradoeucaris141307aNessuna valutazione finora
- Lista Chequeo - Guia 3 Protoboard v2Documento1 paginaLista Chequeo - Guia 3 Protoboard v2Angel PardoNessuna valutazione finora
- Guía Laboratorio 07Documento6 pagineGuía Laboratorio 07Gerson Ruben Chaupis JuarezNessuna valutazione finora
- Modelado y Simulacion de Una Lavanderia Industrial para Entornos Hospitalarios PDFDocumento77 pagineModelado y Simulacion de Una Lavanderia Industrial para Entornos Hospitalarios PDFJuanCárdenasDiazNessuna valutazione finora
- Unidad 37 Esquemas Electricos PDFDocumento61 pagineUnidad 37 Esquemas Electricos PDFJose Javier Moreno CorredorNessuna valutazione finora
- Trabajo Final-Grupo6° - Sección In31 PDFDocumento60 pagineTrabajo Final-Grupo6° - Sección In31 PDFNicoll DesposoriNessuna valutazione finora
- GUIA LABORATORIO HH223-20iiDocumento31 pagineGUIA LABORATORIO HH223-20iiJavier Rodriguez SolisNessuna valutazione finora
- Deluge Systems Manual - 010708 - Es PDFDocumento65 pagineDeluge Systems Manual - 010708 - Es PDFkind23Nessuna valutazione finora
- Manual de Calidad 17025-2017Documento45 pagineManual de Calidad 17025-2017Dorian venegasNessuna valutazione finora
- Implementacion de Un Alimentador ElectroneumaticoDocumento79 pagineImplementacion de Un Alimentador ElectroneumaticoAn HFNessuna valutazione finora
- Tesis 07.07.22Documento100 pagineTesis 07.07.22Karina MantillaNessuna valutazione finora
- Ubillús Gonzales - POSGRADO - 2019Documento106 pagineUbillús Gonzales - POSGRADO - 2019Hansem RosasNessuna valutazione finora
- Junior Aviles Jorge Jimenez Trabajo de Investigacion Bachiller 2018Documento42 pagineJunior Aviles Jorge Jimenez Trabajo de Investigacion Bachiller 2018Juan Manuel Robledo100% (1)
- Informe Técnico Con Descripción de Las Caracteristicas Del Diseño Mecánico y Electrónico Del AUVDocumento91 pagineInforme Técnico Con Descripción de Las Caracteristicas Del Diseño Mecánico y Electrónico Del AUVyodemir -Nessuna valutazione finora
- 54219766cvccc PDFDocumento146 pagine54219766cvccc PDFOrlando CastroNessuna valutazione finora
- Juan Alvaro Reyes Perez - Practica Unidad 4Documento11 pagineJuan Alvaro Reyes Perez - Practica Unidad 4Lïssï MagañaNessuna valutazione finora
- Fundamentos de Programacion Ibm - 101157Documento217 pagineFundamentos de Programacion Ibm - 101157Nahiruby rinconNessuna valutazione finora
- Material de PlanosDocumento21 pagineMaterial de PlanosJorge NavarroNessuna valutazione finora
- ManuDocumento9 pagineManuT DBNessuna valutazione finora
- Pmi Señalizacion VialDocumento58 paginePmi Señalizacion Vialpaola tarrifaNessuna valutazione finora
- GUIA Instrumentación Virtual 2017Documento19 pagineGUIA Instrumentación Virtual 2017Fausto CclNessuna valutazione finora
- 2 Cont - 2017 - Contabilidad de Costos - MaDocumento81 pagine2 Cont - 2017 - Contabilidad de Costos - MaOmar PerezNessuna valutazione finora
- 05 PDFDocumento460 pagine05 PDFFernanda Sánchez DíazNessuna valutazione finora
- Práctica 1 Instrumentación AtomicAntsDocumento20 paginePráctica 1 Instrumentación AtomicAntsJose O Luis KháNessuna valutazione finora
- TOMODocumento124 pagineTOMOcarlos remirezNessuna valutazione finora
- Banco Mecatronica de Buses IV SemesteDocumento34 pagineBanco Mecatronica de Buses IV SemesteCherokee Jose SalazarNessuna valutazione finora
- 2022 Gestion de Costos en El Proc. de ProduccionDocumento130 pagine2022 Gestion de Costos en El Proc. de ProduccionmoisesNessuna valutazione finora
- IGW TRducido PARTE Y - Tutorial de Modelado de IGW PDFDocumento91 pagineIGW TRducido PARTE Y - Tutorial de Modelado de IGW PDFStrauss JhaksNessuna valutazione finora
- NTC 2506Documento159 pagineNTC 2506Marcela Narvaez100% (1)
- Actividad 3. Plan EstratégicoDocumento29 pagineActividad 3. Plan Estratégicojerry HernándezNessuna valutazione finora
- 02.1-Taller Operadores LogicosDocumento2 pagine02.1-Taller Operadores LogicosMyrian NacedNessuna valutazione finora
- DSM 8925 Informe Final Diseño de Un Sistema de Accionamiento Del Balon AmbuDocumento91 pagineDSM 8925 Informe Final Diseño de Un Sistema de Accionamiento Del Balon AmbuALEXIS YOBER AYLAS QUISPENessuna valutazione finora
- Fernandez SR PDFDocumento223 pagineFernandez SR PDFMARITA DE FATIMA LAYME DEL SOLARNessuna valutazione finora
- Lab 03 CP 2021 ADocumento9 pagineLab 03 CP 2021 AROBEL LIZANDRO VILCA QUISPENessuna valutazione finora
- Gestión de proyectos con enfoque PMI al usar Project y Excel - 1ra ediciónDa EverandGestión de proyectos con enfoque PMI al usar Project y Excel - 1ra ediciónNessuna valutazione finora
- La desmaterialización y su impacto en la gestión de riesgos en el mercado público de valoresDa EverandLa desmaterialización y su impacto en la gestión de riesgos en el mercado público de valoresNessuna valutazione finora
- Redes SocialesDocumento13 pagineRedes SocialesRicardo cuevaNessuna valutazione finora
- Metrado 4 - Sum y Caseta de Bombas 10-05-21 8 PMDocumento32 pagineMetrado 4 - Sum y Caseta de Bombas 10-05-21 8 PMRicardo cuevaNessuna valutazione finora
- Protocolos Mecanico PrecomisionamientoDocumento31 pagineProtocolos Mecanico PrecomisionamientoRicardo cuevaNessuna valutazione finora
- CCG-M-007 Registro de Inspeccion de La Sala Del Grupo (Genset)Documento3 pagineCCG-M-007 Registro de Inspeccion de La Sala Del Grupo (Genset)Ricardo cuevaNessuna valutazione finora
- Protocolos Fusionados - InstrumentacionDocumento26 pagineProtocolos Fusionados - InstrumentacionRicardo cuevaNessuna valutazione finora
- AutocuidadoDocumento12 pagineAutocuidadoRicardo cuevaNessuna valutazione finora
- Procedimiento General de Aplicación de Tintes Penetrantes VisiblesDocumento19 pagineProcedimiento General de Aplicación de Tintes Penetrantes VisiblesRicardo cuevaNessuna valutazione finora
- Transferencia de ColorDocumento22 pagineTransferencia de ColorRicardo cuevaNessuna valutazione finora
- Auditoria Marshall OriginalDocumento42 pagineAuditoria Marshall OriginalRicardo cuevaNessuna valutazione finora
- INFORMACIÓNDocumento23 pagineINFORMACIÓNRicardo cuevaNessuna valutazione finora
- Estandar de Soportes de Piping PDFDocumento99 pagineEstandar de Soportes de Piping PDFalexNessuna valutazione finora
- EXAUSTORDocumento2 pagineEXAUSTORRicardo cuevaNessuna valutazione finora
- Descripción Del Modelo 3dDocumento2 pagineDescripción Del Modelo 3dRicardo cuevaNessuna valutazione finora
- Calculo Corona SinfinDocumento13 pagineCalculo Corona SinfinOscar IbañezNessuna valutazione finora
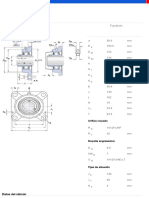
- Unidades de Rodamientos Y Con Pestaña Cuadrada-FY 2. TFDocumento2 pagineUnidades de Rodamientos Y Con Pestaña Cuadrada-FY 2. TFRicardo cuevaNessuna valutazione finora
- Analisis de Precios Unitarios Equipos yDocumento55 pagineAnalisis de Precios Unitarios Equipos yjorgeNessuna valutazione finora
- Calculo Corona SinfinDocumento13 pagineCalculo Corona SinfinOscar IbañezNessuna valutazione finora
- Descripción de ODM y ClasesDocumento4 pagineDescripción de ODM y ClasesRicardo cuevaNessuna valutazione finora
- Sec Tor N °01 Llave TermicaDocumento1 paginaSec Tor N °01 Llave TermicaRicardo cuevaNessuna valutazione finora
- Manual Practico de Desarrollos Antonio Olave Villanueva PDFDocumento42 pagineManual Practico de Desarrollos Antonio Olave Villanueva PDFCarlos Hdz100% (2)
- TabelleAlimenti Desbloqueado - En.esDocumento46 pagineTabelleAlimenti Desbloqueado - En.esRicardo cuevaNessuna valutazione finora
- Reloj EngranajesDocumento1 paginaReloj EngranajesRicardo cuevaNessuna valutazione finora
- La Rosa - MDDocumento100 pagineLa Rosa - MDRicardo cuevaNessuna valutazione finora
- 456Documento1 pagina456Ricardo cuevaNessuna valutazione finora
- Libro Del GénesisDocumento12 pagineLibro Del GénesisRicardo cuevaNessuna valutazione finora
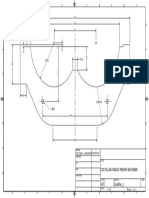
- Plano de Fabricacion PDFDocumento1 paginaPlano de Fabricacion PDFRicardo cuevaNessuna valutazione finora
- Nema17 3Documento1 paginaNema17 3Ricardo cuevaNessuna valutazione finora
- Plan 1Documento68 paginePlan 1Anonymous 68YpoaNessuna valutazione finora
- Nema17 3Documento1 paginaNema17 3Ricardo cuevaNessuna valutazione finora
- Enfoque ConductistaDocumento15 pagineEnfoque ConductistaRicardo cueva100% (1)
- Remanencia MagneticaDocumento12 pagineRemanencia Magneticajuan perezNessuna valutazione finora
- Sistemas Electricos de Una CentralDocumento27 pagineSistemas Electricos de Una CentralWilder Enrique Gracia OviedoNessuna valutazione finora
- Tablero de Control de Motor y GeneradorDocumento2 pagineTablero de Control de Motor y Generadorroaddog3000Nessuna valutazione finora
- (VOLVO) Manual de Taller Volvo PentaDocumento74 pagine(VOLVO) Manual de Taller Volvo PentaHéctorHernándezDíaz60% (5)
- HGM420 PDFDocumento17 pagineHGM420 PDFrosemberg_trujilloNessuna valutazione finora
- Protecciones 59-27Documento39 pagineProtecciones 59-27Dave RobetNessuna valutazione finora
- Determinación de La Carta de Operación de Un Generador Síncrono de Polos SalientesDocumento18 pagineDeterminación de La Carta de Operación de Un Generador Síncrono de Polos SalientesGustavoDelCarpioYanaNessuna valutazione finora
- U4 Motor Sincrono DannyDocumento28 pagineU4 Motor Sincrono DannyDaniiCarrasquedoNessuna valutazione finora
- Frenado Dinamico para Motores de Corriente ContinuaDocumento4 pagineFrenado Dinamico para Motores de Corriente ContinuaAusencio Gallegos Monterrubio100% (2)
- Pre1 MLT 200-1Documento9 paginePre1 MLT 200-1hugo238732Nessuna valutazione finora
- Operación de Una Maquina Sincrona Como Motor y GeneradorDocumento4 pagineOperación de Una Maquina Sincrona Como Motor y GeneradorEmmanuel Lopez PeñafielNessuna valutazione finora
- Ejercicios de Maquinas Electricas Ing MecDocumento2 pagineEjercicios de Maquinas Electricas Ing Meclenin olivaresNessuna valutazione finora
- Electricidad Curso1Documento43 pagineElectricidad Curso1Luis Fernando CampuzanoNessuna valutazione finora
- Uni Infolabo2 Ml121a PinadoDocumento23 pagineUni Infolabo2 Ml121a PinadoJaime PinadoNessuna valutazione finora
- Tema .1Documento18 pagineTema .1JUAN ENRIQUE QUIROZ CLAVIJONessuna valutazione finora
- CURSO PRF Valderrama - Protecciones de Sistemas de Distribución Mayo 2006Documento224 pagineCURSO PRF Valderrama - Protecciones de Sistemas de Distribución Mayo 2006joelNessuna valutazione finora
- Entrenador de Television ER7BDocumento11 pagineEntrenador de Television ER7BcaryubNessuna valutazione finora
- 01 - Conceptos y Características de La Corriente Alterna PDFDocumento117 pagine01 - Conceptos y Características de La Corriente Alterna PDFHernando Martinez GarciaNessuna valutazione finora
- Max Transferencia de PotenciaDocumento5 pagineMax Transferencia de PotenciaAlana MinNessuna valutazione finora
- Maquinas ElectricasDocumento10 pagineMaquinas ElectricasFiliberto MtzNessuna valutazione finora
- Circuito Eléctrico y Presion AtmosfericaDocumento4 pagineCircuito Eléctrico y Presion AtmosfericaIsrael Wingzero GomezNessuna valutazione finora
- Informe Generadores Cc1Documento9 pagineInforme Generadores Cc1Leidy AimacañaNessuna valutazione finora
- Capitulo 6 Casa de Máquinas Equipos Electromecánicos UVDocumento51 pagineCapitulo 6 Casa de Máquinas Equipos Electromecánicos UVKevin OchoaNessuna valutazione finora
- Resistencia y Codigos de ColoresDocumento13 pagineResistencia y Codigos de ColoresJohn Cristian Pecho TaipeNessuna valutazione finora
- Central Termoeléctrica Ilo 4 Nepi Nodo Energético SurDocumento13 pagineCentral Termoeléctrica Ilo 4 Nepi Nodo Energético SurHarima HarioNessuna valutazione finora
- Manual de Operación: GeneradorDocumento56 pagineManual de Operación: GeneradorDonpito LargaNessuna valutazione finora
- Tesis PDFDocumento271 pagineTesis PDFPedro Alva ArceNessuna valutazione finora
- Elementos Principales de Una Planta HidroeléctricaDocumento2 pagineElementos Principales de Una Planta HidroeléctricaVKR300Nessuna valutazione finora
- Práctica No 3Documento10 paginePráctica No 3wendy jhoanna moreno diazNessuna valutazione finora
- Caracteristicas de Los Generadores Sincronos Bajo CargaDocumento7 pagineCaracteristicas de Los Generadores Sincronos Bajo CargaГуадалупе Монтсеррат КастроNessuna valutazione finora