Potrebbero piacerti anche
- Closed-Loop Systems: SystemDocumento9 pagineClosed-Loop Systems: SystemBhimsen ShresthaNessuna valutazione finora
- Closed Loop Block DiagramDocumento9 pagineClosed Loop Block Diagramspj99696649148Nessuna valutazione finora
- Closed-Loop System and Closed-Loop Control SystemsDocumento9 pagineClosed-Loop System and Closed-Loop Control SystemsfwefNessuna valutazione finora
- Block Diagram Representation of A Simple Electronic System: Main DefinitionsDocumento9 pagineBlock Diagram Representation of A Simple Electronic System: Main DefinitionsCansu ElizadeNessuna valutazione finora
- Closed System Continous - ExpDocumento7 pagineClosed System Continous - ExpMUHAMMAD AKRAMNessuna valutazione finora
- Ibañez, Ben Aldrian T. Assignment-1 Auto221Documento4 pagineIbañez, Ben Aldrian T. Assignment-1 Auto221Ben Aldrian Tariao IbañezNessuna valutazione finora
- Draw and Explain Closed Loop System: AssignmentDocumento3 pagineDraw and Explain Closed Loop System: AssignmentSameer ArifNessuna valutazione finora
- Block DiagramsDocumento26 pagineBlock Diagramsmanoj walekarNessuna valutazione finora
- Closed Loop System - ElectronicsHubDocumento14 pagineClosed Loop System - ElectronicsHubcdkNessuna valutazione finora
- Control System Unit-1Documento29 pagineControl System Unit-1Tanishq SinghNessuna valutazione finora
- OCW - Control Systems - I (EE 503) - AY 2016-17 - 2017-18 PDFDocumento100 pagineOCW - Control Systems - I (EE 503) - AY 2016-17 - 2017-18 PDFCiczmockingbird TsvkAdm100% (1)
- CS Unit-1Documento42 pagineCS Unit-1auchthram143Nessuna valutazione finora
- NotesDocumento72 pagineNotes026Himani GautamNessuna valutazione finora
- Open Loop and Close Loop Control SystemDocumento10 pagineOpen Loop and Close Loop Control SystemAmrit SinghaNessuna valutazione finora
- Closed Loop Control SystemDocumento6 pagineClosed Loop Control SystemMUHAMMAD AKRAMNessuna valutazione finora
- CS Mod1@AzDOCUMENTS - inDocumento20 pagineCS Mod1@AzDOCUMENTS - insssNessuna valutazione finora
- Control SystemsDocumento8 pagineControl Systemsmohammed zaidNessuna valutazione finora
- Lecture 6 PDFDocumento26 pagineLecture 6 PDFAlhaj MassoudNessuna valutazione finora
- Control System NotesDocumento127 pagineControl System NotesYash MathuriaNessuna valutazione finora
- Figure 1 Process Under ControlDocumento9 pagineFigure 1 Process Under ControlKajalNessuna valutazione finora
- Lcs Unit 1 PDFDocumento30 pagineLcs Unit 1 PDFRajasekhar AtlaNessuna valutazione finora
- ConeggDocumento1 paginaConeggAmeeh TorionNessuna valutazione finora
- Chapter 6 (IESL)Documento10 pagineChapter 6 (IESL)Muhammed IfkazNessuna valutazione finora
- Linear Control System: Presented by Imran Basha SyedDocumento35 pagineLinear Control System: Presented by Imran Basha SyedSyed Imran BashaNessuna valutazione finora
- Unit-I: Concept of Control SystemDocumento129 pagineUnit-I: Concept of Control SystemPavitra Murugesan100% (1)
- Feedback and Control Systems: Rezel A. Sto. Tomas, Ece 1Documento10 pagineFeedback and Control Systems: Rezel A. Sto. Tomas, Ece 1kujong agacerNessuna valutazione finora
- Ducment 1 ReaserchDocumento41 pagineDucment 1 ReaserchAbubaker MuzayinNessuna valutazione finora
- Mechatronics NotesDocumento90 pagineMechatronics NotesSanskar AgrawalNessuna valutazione finora
- Text Book of Mechatronics Foe MG University StudentssDocumento99 pagineText Book of Mechatronics Foe MG University StudentssBASIL BENNY100% (1)
- Unit No - II: Block Diagram RepresentationDocumento56 pagineUnit No - II: Block Diagram RepresentationNamrta DeokateNessuna valutazione finora
- Control Engineering: Types of Control SystemsDocumento26 pagineControl Engineering: Types of Control SystemsGilbert SigalaNessuna valutazione finora
- Topic 1: Introduction To Control System and Mathematical ReviewDocumento43 pagineTopic 1: Introduction To Control System and Mathematical ReviewFaez FeakryNessuna valutazione finora
- LESSON1 IntroToControlSystemDocumento10 pagineLESSON1 IntroToControlSystemalexancog456Nessuna valutazione finora
- LCS R19 - Unit-1Documento8 pagineLCS R19 - Unit-1Gowtham DhanarasiNessuna valutazione finora
- Control EngineeringDocumento7 pagineControl Engineeringuet158Nessuna valutazione finora
- Cpe 315 Feedback Control System LessonsDocumento28 pagineCpe 315 Feedback Control System Lessonskeny amigableNessuna valutazione finora
- Control Engineering Instructional Module LecturesDocumento13 pagineControl Engineering Instructional Module LecturesJohn Kenneth Santiago PaulinoNessuna valutazione finora
- Note 1: Lecture Notes of Control Systems I - ME 431/analysis and Synthesis of Linear Control System - ME862Documento6 pagineNote 1: Lecture Notes of Control Systems I - ME 431/analysis and Synthesis of Linear Control System - ME862MessiNessuna valutazione finora
- Mis Feedback Control SystemDocumento9 pagineMis Feedback Control System5741 Jeenia MongaNessuna valutazione finora
- Transfer Functions Examples Part 1Documento21 pagineTransfer Functions Examples Part 1Gideon Moyo0% (1)
- Module-I: Concept of Control SystemDocumento8 pagineModule-I: Concept of Control SystemDeepshikhaNessuna valutazione finora
- Unit I NotesDocumento43 pagineUnit I Notesaravinth69601Nessuna valutazione finora
- Unidad 1: Introducción Al Análisis de Sistemas de Control: Asignatura Teoría de Control 1 Prof. Mariela Cerrada LozadaDocumento45 pagineUnidad 1: Introducción Al Análisis de Sistemas de Control: Asignatura Teoría de Control 1 Prof. Mariela Cerrada LozadaedissonNessuna valutazione finora
- Mis Feedback Control System - PowerpointDocumento9 pagineMis Feedback Control System - Powerpoint5741 Jeenia MongaNessuna valutazione finora
- Control System ReportDocumento2 pagineControl System ReportJane SigaNessuna valutazione finora
- Experiment 1Documento7 pagineExperiment 1PRITAM TELINessuna valutazione finora
- Sist AutoDocumento6 pagineSist AutoTomásYT XDNessuna valutazione finora
- 000 Digital Control LecturesDocumento67 pagine000 Digital Control LecturesPX PRNessuna valutazione finora
- Basics of Control Eng 1Documento26 pagineBasics of Control Eng 1Hezron gibronNessuna valutazione finora
- Things To Think About Ch.13 (Process Control A)Documento21 pagineThings To Think About Ch.13 (Process Control A)Salsa NisaNessuna valutazione finora
- Modern Control SystemDocumento72 pagineModern Control SystemBewnet GetachewNessuna valutazione finora
- IntroductionDocumento39 pagineIntroductionMohd FazliNessuna valutazione finora
- W EE 418 - Lecture 1 Overview and IntroductionDocumento56 pagineW EE 418 - Lecture 1 Overview and IntroductionGGAP LASTNessuna valutazione finora
- Control Engineering: Closed-Loop Poles Are The Positions of The Poles (OrDocumento9 pagineControl Engineering: Closed-Loop Poles Are The Positions of The Poles (OrWanambwa SilagiNessuna valutazione finora
- Controls Finals ResearchDocumento15 pagineControls Finals ResearchRenz Xynor Liotib CadizNessuna valutazione finora
- Me 2401 Mechatronics Unit 1 NotesDocumento60 pagineMe 2401 Mechatronics Unit 1 NotesSivagami PunithavathiNessuna valutazione finora
- Homework 8 TCDocumento12 pagineHomework 8 TCSebastián TorresNessuna valutazione finora
- Designing PID AlgorithmDocumento7 pagineDesigning PID AlgorithmVu Duc TruongNessuna valutazione finora
- Control Systems Laboratory Experiment 4 Open-Loop vs. Closed-Loop Control SystemsDocumento6 pagineControl Systems Laboratory Experiment 4 Open-Loop vs. Closed-Loop Control SystemsAli MoustafaNessuna valutazione finora
- Aggregate Production PlanningDocumento3 pagineAggregate Production PlanningavenashaNessuna valutazione finora
- Isometric ProjectionDocumento2 pagineIsometric Projectionavenasha100% (1)
- Bank Exam Today - Career TodayDocumento22 pagineBank Exam Today - Career TodayRohithGiridharanNessuna valutazione finora
- Radiation Exchange Between Surfaces: Enclosures With Nonparticipating MediaDocumento26 pagineRadiation Exchange Between Surfaces: Enclosures With Nonparticipating MediaavenashaNessuna valutazione finora
- AnalogDocumento25 pagineAnalogavenashaNessuna valutazione finora
- Why Do We Take Initial Condition ZeroDocumento2 pagineWhy Do We Take Initial Condition ZeroavenashaNessuna valutazione finora
- Kinematics of MachinesDocumento227 pagineKinematics of Machinesborchec100% (2)
- Special CastingDocumento71 pagineSpecial CastingPawan RathiNessuna valutazione finora
- Thin FilmDocumento12 pagineThin FilmavenashaNessuna valutazione finora
- Failure TheoriesDocumento21 pagineFailure TheoriesMadhan Krishnamurthy100% (1)
- Types of NC SystemsDocumento2 pagineTypes of NC SystemsKrishna MohanNessuna valutazione finora
- Course in Machine Design: Fatigue IDocumento58 pagineCourse in Machine Design: Fatigue IavenashaNessuna valutazione finora
- 215 Sample ChapterDocumento23 pagine215 Sample ChapterSreekumar RajendrababuNessuna valutazione finora
- Composite Failure TheoriesDocumento19 pagineComposite Failure TheoriesZach Lovering0% (1)
- Slip Vs TwinningDocumento1 paginaSlip Vs TwinningavenashaNessuna valutazione finora
- Course in Machine Design: Fatigue IDocumento58 pagineCourse in Machine Design: Fatigue IavenashaNessuna valutazione finora
- Calculus GuideDocumento12 pagineCalculus GuideShahriar KNessuna valutazione finora
- Math Handout (Trigonometry) Trig Formulas Web Page PDFDocumento5 pagineMath Handout (Trigonometry) Trig Formulas Web Page PDFCrimson PidlaoanNessuna valutazione finora
- DvbdsvavDocumento1 paginaDvbdsvavavenashaNessuna valutazione finora
- Math Handout (Trigonometry) Trig Formulas Web Page PDFDocumento5 pagineMath Handout (Trigonometry) Trig Formulas Web Page PDFCrimson PidlaoanNessuna valutazione finora
- Process Parameters of Abrasive Jet MachingDocumento3 pagineProcess Parameters of Abrasive Jet MachingavenashaNessuna valutazione finora
- Liquid and Gaseous Fuels Are Considered Better Fuels Than The Solid Fuels Because of The Following ReasonsDocumento2 pagineLiquid and Gaseous Fuels Are Considered Better Fuels Than The Solid Fuels Because of The Following ReasonsavenashaNessuna valutazione finora
- Chapter 9e FatigueDocumento20 pagineChapter 9e FatigueavenashaNessuna valutazione finora
- Press and Shrink FitsDocumento11 paginePress and Shrink FitsAhmed M TNessuna valutazione finora
- L06 Vacuum EvaporationDocumento30 pagineL06 Vacuum EvaporationavenashaNessuna valutazione finora
- Fluid Mechanics & MachinesDocumento307 pagineFluid Mechanics & MachinesKBSMANIT100% (9)
- Aula 6Documento57 pagineAula 6avenashaNessuna valutazione finora
- CP CV GasesDocumento16 pagineCP CV GasesavenashaNessuna valutazione finora
- ProbabilityDocumento42 pagineProbabilityPrashant TiwariNessuna valutazione finora
- Aprilia SR 50 Factory Owners ManualDocumento88 pagineAprilia SR 50 Factory Owners ManualAnna RyanNessuna valutazione finora
- Building Completion Certificate: Certificate Number Plot Number Initial Issue DateDocumento2 pagineBuilding Completion Certificate: Certificate Number Plot Number Initial Issue DateAbrar AbbasiNessuna valutazione finora
- Top 100 IT Companies (Rank-Wise List)Documento3 pagineTop 100 IT Companies (Rank-Wise List)Somesh100% (1)
- 1 - ERDAS IMAGINE Viewer PDFDocumento20 pagine1 - ERDAS IMAGINE Viewer PDFRahmad KurniawanNessuna valutazione finora
- Washer Dryer: Owner'S ManualDocumento29 pagineWasher Dryer: Owner'S ManualThai FuizaiNessuna valutazione finora
- Dr. Assad Abu-Jasser, ECE-iugaza: Electrical Machines (EELE 4350)Documento37 pagineDr. Assad Abu-Jasser, ECE-iugaza: Electrical Machines (EELE 4350)MohammedSaadaniHassani67% (6)
- @ RhinoDocumento29 pagine@ RhinoHimanshu PatelNessuna valutazione finora
- Analytical Study On The Cornering Behavior of An Articulated Tracked VehicleDocumento1 paginaAnalytical Study On The Cornering Behavior of An Articulated Tracked VehicleiDEvNessuna valutazione finora
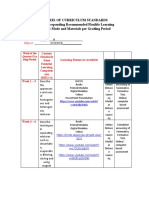
- Matrix of Curriculum Standards With Corresponding Recommended Flexible Learning Delivery Mode and Materials Per Grading PeriodDocumento2 pagineMatrix of Curriculum Standards With Corresponding Recommended Flexible Learning Delivery Mode and Materials Per Grading PeriodNora HerreraNessuna valutazione finora
- Sustainable Production of Acrolein: Investigation of Solid Acid-Base Catalysts For Gas-Phase Dehydration of GlycerolDocumento7 pagineSustainable Production of Acrolein: Investigation of Solid Acid-Base Catalysts For Gas-Phase Dehydration of GlycerolnayarapradoNessuna valutazione finora
- Assignment Payment 1Documento5 pagineAssignment Payment 1Mohamad SafwanNessuna valutazione finora
- 3.5 Dump Valve PDFDocumento5 pagine3.5 Dump Valve PDFBaciu NicolaeNessuna valutazione finora
- GROUP 7 - Banksia-SD-SE-T1-Hazard-Report-Form-Template-V1.0-ID-200278Documento5 pagineGROUP 7 - Banksia-SD-SE-T1-Hazard-Report-Form-Template-V1.0-ID-200278Samir Mosquera-PalominoNessuna valutazione finora
- BMW E46 RearlightDocumento4 pagineBMW E46 RearlightLiviu CasuneanuNessuna valutazione finora
- Readytoprocess Wave 25Documento172 pagineReadytoprocess Wave 25Ashish GowandeNessuna valutazione finora
- Technical Summary: Semiconductor MC68HC11A8 MC68HC11A1 MC68HC11A0 8-Bit MicrocontrollersDocumento45 pagineTechnical Summary: Semiconductor MC68HC11A8 MC68HC11A1 MC68HC11A0 8-Bit MicrocontrollersElias CoronelNessuna valutazione finora
- Understanding The Harmony Information in The Preset DisplayDocumento2 pagineUnderstanding The Harmony Information in The Preset DisplaymileroNessuna valutazione finora
- Report of Apollo 201 Review BoardDocumento2.540 pagineReport of Apollo 201 Review BoardBob Andrepont100% (2)
- Fast-Recovery Rectifier Diodes: Ru 4Y Ru 4Z RU4 Ru 4A Ru 4B Ru 4CDocumento1 paginaFast-Recovery Rectifier Diodes: Ru 4Y Ru 4Z RU4 Ru 4A Ru 4B Ru 4CY. Leonel MolinaNessuna valutazione finora
- MYG Varistors Data SheetDocumento4 pagineMYG Varistors Data SheetPedro Giménez100% (1)
- Datasheet Dc-m9204 & Di-M9204 Manual Call PointDocumento4 pagineDatasheet Dc-m9204 & Di-M9204 Manual Call PointHajji MehdiNessuna valutazione finora
- Chapter 9 PondsDocumento65 pagineChapter 9 Pondssheil.cogayNessuna valutazione finora
- Robotic CafeDocumento13 pagineRobotic CafeRana SaqlainNessuna valutazione finora
- Ludwig Eduard BoltzmannDocumento10 pagineLudwig Eduard BoltzmannMarkoNessuna valutazione finora
- Sermac SCL130ADocumento2 pagineSermac SCL130AVasiliy PavliukNessuna valutazione finora
- S. No. Unit: (Ch. 23 Item 7)Documento4 pagineS. No. Unit: (Ch. 23 Item 7)Muhammad Abdul Wajid RaiNessuna valutazione finora
- 17-4658 LT-650Documento436 pagine17-4658 LT-650jose juanNessuna valutazione finora
- Autocad AliasDocumento8 pagineAutocad AliasJay Cee de BelenNessuna valutazione finora
- KX2 Manual PDFDocumento212 pagineKX2 Manual PDFhungstampNessuna valutazione finora
- Emergency Off and Rescue From Helicopter: Ground Rescue Booklet Ec130T2Documento20 pagineEmergency Off and Rescue From Helicopter: Ground Rescue Booklet Ec130T2robbertmd100% (1)