Potrebbero piacerti anche
- Dynamical Systems and Control ExercisesDocumento37 pagineDynamical Systems and Control ExercisessamielmadssiaNessuna valutazione finora
- Excercise of Mathetic of ModelingDocumento4 pagineExcercise of Mathetic of ModelingDương Chí TuấnNessuna valutazione finora
- EEET2197 Tute5Documento2 pagineEEET2197 Tute5Collin lcwNessuna valutazione finora
- Problemas MecanicaDocumento8 pagineProblemas MecanicaFabian Andres Blanco GNessuna valutazione finora
- EE207 Problem set 1 IIT ROPARDocumento7 pagineEE207 Problem set 1 IIT ROPARsumithasreekumar5Nessuna valutazione finora
- Digital System - Week 5 TutorialDocumento9 pagineDigital System - Week 5 TutorialRetheshNessuna valutazione finora
- State Variable Models ExplainedDocumento39 pagineState Variable Models ExplainedveenadivyakishNessuna valutazione finora
- Voltage Tracking of A Multi-Input InterleavedDocumento4 pagineVoltage Tracking of A Multi-Input InterleavedREYES APOLONIO CASTRO CORRALNessuna valutazione finora
- Report On Magnetic Levitation System ModellingDocumento6 pagineReport On Magnetic Levitation System ModellingSteve Goke AyeniNessuna valutazione finora
- Experiment No.03: Mathematical Modeling of Physical System: ObjectiveDocumento5 pagineExperiment No.03: Mathematical Modeling of Physical System: ObjectiveSao SavathNessuna valutazione finora
- Ic6501 Control Systems: UNIT-1 (2 Mark Q/A)Documento6 pagineIc6501 Control Systems: UNIT-1 (2 Mark Q/A)Anonymous yO7rcec6vuNessuna valutazione finora
- EE207 Problem Set 1Documento2 pagineEE207 Problem Set 1Rishabh AgarwalNessuna valutazione finora
- Modeling Systems with Transfer Functions and State SpaceDocumento15 pagineModeling Systems with Transfer Functions and State SpaceMaksud SarkerNessuna valutazione finora
- Signals and Systems2011suppDocumento3 pagineSignals and Systems2011suppAnkan BhuniaNessuna valutazione finora
- Mathematical ModellingDocumento21 pagineMathematical ModellingFhuNessuna valutazione finora
- Problems 01Documento2 pagineProblems 01Francisco Machado0% (1)
- Modern Control: Dr.-Ing. Erwin Sitompul President UniversityDocumento21 pagineModern Control: Dr.-Ing. Erwin Sitompul President UniversityIan John MontalboNessuna valutazione finora
- System Modeling in Time DomainDocumento74 pagineSystem Modeling in Time DomainSanji KarunaNessuna valutazione finora
- Assignment 3 - State Feedback 1 Two Liquid Tanks in Series: I II I II I IDocumento2 pagineAssignment 3 - State Feedback 1 Two Liquid Tanks in Series: I II I II I IJuro KuklaNessuna valutazione finora
- R. W. EricksonDocumento51 pagineR. W. EricksonVanshika JindalNessuna valutazione finora
- Test 1 BDocumento4 pagineTest 1 BAnthony EschNessuna valutazione finora
- State Space ExamplesDocumento9 pagineState Space ExamplesLumi_Kahlout_4652Nessuna valutazione finora
- State Space Modeling FundamentalsDocumento19 pagineState Space Modeling Fundamentalsjiraya chiNessuna valutazione finora
- Modeling State Variable SystemsDocumento47 pagineModeling State Variable SystemsEngr Abdul QadeerNessuna valutazione finora
- Final Exam - SampleDocumento4 pagineFinal Exam - SampleAhmed MashhoorNessuna valutazione finora
- Exo StudentDocumento3 pagineExo StudentHassanNessuna valutazione finora
- Exam RT2 2015 SummerDocumento7 pagineExam RT2 2015 SummerLuis CarvalhoNessuna valutazione finora
- Seetb255 Csexp8Documento10 pagineSeetb255 Csexp8TEETB252Srushti ChoudhariNessuna valutazione finora
- Modern Control Systems Stability AnalysisDocumento23 pagineModern Control Systems Stability AnalysisDevangi ChoudharyNessuna valutazione finora
- State Space Averaging ExplainedDocumento50 pagineState Space Averaging ExplainedSomnath MaityNessuna valutazione finora
- S D S D D D S S D D S: P N N PDocumento5 pagineS D S D D D S S D D S: P N N PPankajSinghBhatiNessuna valutazione finora
- Mechanical Systems: Translational RotationalDocumento30 pagineMechanical Systems: Translational RotationalHussainNessuna valutazione finora
- Advanced Control SystemsDocumento81 pagineAdvanced Control Systemsanoop sathyanNessuna valutazione finora
- Ee304 ADocumento3 pagineEe304 AAboo FarisNessuna valutazione finora
- Dod ProblemsDocumento35 pagineDod ProblemsQuỳnh NguyễnNessuna valutazione finora
- Q.1 To Q.25 Carry One Mark EachDocumento13 pagineQ.1 To Q.25 Carry One Mark EachbaluNessuna valutazione finora
- MECH4310 Fall2015 Homework#4Documento2 pagineMECH4310 Fall2015 Homework#4Anonymous emsONzXltnNessuna valutazione finora
- State Space Analysis by Dr. FidaDocumento44 pagineState Space Analysis by Dr. FidaAyesha TehreemNessuna valutazione finora
- Electromagnetic Induction - Practice SheetDocumento8 pagineElectromagnetic Induction - Practice Sheetamit singhNessuna valutazione finora
- Mathematical Models and LinearizationDocumento19 pagineMathematical Models and LinearizationKelvin KongNessuna valutazione finora
- 20.2.2 Matrices of Coefficients: 20.3 General Procedure For Writing A State Variable RepresentationDocumento10 pagine20.2.2 Matrices of Coefficients: 20.3 General Procedure For Writing A State Variable Representationilhan absoluteNessuna valutazione finora
- L L T J T B T K T FXTXT: F 2007 P E I - P (Open-Book, Open-Notes) Page 1/4Documento4 pagineL L T J T B T K T FXTXT: F 2007 P E I - P (Open-Book, Open-Notes) Page 1/4JaneNessuna valutazione finora
- Question Bank Unit 4-1Documento3 pagineQuestion Bank Unit 4-1birajkushwaha1996Nessuna valutazione finora
- Modeling and Simulation of A Series Resonant InverterDocumento6 pagineModeling and Simulation of A Series Resonant InverterkaaisNessuna valutazione finora
- Chapter 2 Mathematical Models of ControlDocumento36 pagineChapter 2 Mathematical Models of Controlherber_28Nessuna valutazione finora
- Abbas Ali Afzali's Finilaized 2nd Home WorkDocumento13 pagineAbbas Ali Afzali's Finilaized 2nd Home WorkMohammad AminNessuna valutazione finora
- Assignment 1Documento4 pagineAssignment 1Ashish KushwahaNessuna valutazione finora
- Problem 1 - Speaker Model (20pts) : Figure 1: Simplified Loudspeaker System (Cross Section)Documento2 pagineProblem 1 - Speaker Model (20pts) : Figure 1: Simplified Loudspeaker System (Cross Section)JhalaNessuna valutazione finora
- Tutorial of Non-Isolated DC-DC Converters in Discontinuous Mode (Benny Yeung)Documento5 pagineTutorial of Non-Isolated DC-DC Converters in Discontinuous Mode (Benny Yeung)Shah ZaibNessuna valutazione finora
- Lab 8 Synchronous Sequential CircuitsDocumento9 pagineLab 8 Synchronous Sequential Circuitsapi-385689610Nessuna valutazione finora
- EE3302Documento2 pagineEE3302ashishNessuna valutazione finora
- Unit 1Documento50 pagineUnit 1Santhosh KumarNessuna valutazione finora
- Asynchronous Sequential Circuits: E&CE223 Digital Circuits and SystemsDocumento45 pagineAsynchronous Sequential Circuits: E&CE223 Digital Circuits and Systemskirthica100% (1)
- Asynchronous Sequential Circuits: E&CE223 Digital Circuits and SystemsDocumento45 pagineAsynchronous Sequential Circuits: E&CE223 Digital Circuits and SystemskirthicaNessuna valutazione finora
- Synchronous Sequential Circuit Problems: Problem # 1Documento6 pagineSynchronous Sequential Circuit Problems: Problem # 1Anonymous AFFiZnNessuna valutazione finora
- TD Cours Tipe PDFDocumento25 pagineTD Cours Tipe PDFAnonymous hyeNVbcONessuna valutazione finora
- Fundamentals of Electronics 1: Electronic Components and Elementary FunctionsDa EverandFundamentals of Electronics 1: Electronic Components and Elementary FunctionsNessuna valutazione finora
- Exercises in Electronics: Operational Amplifier CircuitsDa EverandExercises in Electronics: Operational Amplifier CircuitsValutazione: 3 su 5 stelle3/5 (1)
- Air Conditioning Principles and SystemsDocumento544 pagineAir Conditioning Principles and SystemsManoj Kumar Sahoo100% (1)
- Prob 06.71Documento2 pagineProb 06.71Venkat DalaiNessuna valutazione finora
- GS With Key MarkedDocumento84 pagineGS With Key MarkedRavindra ReddyNessuna valutazione finora
- Air Conditioning Principles and SystemsDocumento544 pagineAir Conditioning Principles and SystemsManoj Kumar Sahoo100% (1)
- AEE1000005530 HallTicketDocumento3 pagineAEE1000005530 HallTicketVenkat DalaiNessuna valutazione finora
- Solution Manual For Engineering Mechanics Statics and Dynamics 2nd Edition by PleshaDocumento376 pagineSolution Manual For Engineering Mechanics Statics and Dynamics 2nd Edition by PleshaVenkat Dalai0% (5)
- 15:00 / 21 01 2017 Entry Point: ATC CAR Parking Area: Tirumala Tirupati Devasthanams Special Entry Darshan ReceiptDocumento1 pagina15:00 / 21 01 2017 Entry Point: ATC CAR Parking Area: Tirumala Tirupati Devasthanams Special Entry Darshan ReceiptVenkat DalaiNessuna valutazione finora
- Current Issues For AE AEE APPSCDocumento34 pagineCurrent Issues For AE AEE APPSCBala SubramanianNessuna valutazione finora
- Amie Course StructureDocumento3 pagineAmie Course StructurerajivNessuna valutazione finora
- Example: 56 Mpa 50 Mm Ρ 56 Mpa 56 MpaDocumento22 pagineExample: 56 Mpa 50 Mm Ρ 56 Mpa 56 MpaVenkat Dalai100% (1)
- 6ffc8cf65c32f101c8ed97374635df25_c34abad318bdb9df77011169a21da5a7Documento2 pagine6ffc8cf65c32f101c8ed97374635df25_c34abad318bdb9df77011169a21da5a7Venkat DalaiNessuna valutazione finora
- ME 211 CH 6 Example SolutionsDocumento25 pagineME 211 CH 6 Example SolutionsVenkat DalaiNessuna valutazione finora
- Solved Problems, Dimensional Analysis Ans SimilitudeDocumento15 pagineSolved Problems, Dimensional Analysis Ans SimilitudeBilal SaifNessuna valutazione finora
- Ism02Documento108 pagineIsm02Venkat DalaiNessuna valutazione finora
- Mechanical Paper III (EEA - 506 Eng) PDFDocumento4 pagineMechanical Paper III (EEA - 506 Eng) PDFVenkat DalaiNessuna valutazione finora
- Assignment5 SolutionDocumento6 pagineAssignment5 SolutionVenkat DalaiNessuna valutazione finora
- ProgrammeDocumento3 pagineProgrammeEnd EndNessuna valutazione finora
- A B C BC A A B C BC ADocumento8 pagineA B C BC A A B C BC AVenkat DalaiNessuna valutazione finora
- RedBus Ticket 79174239Documento1 paginaRedBus Ticket 79174239Venkat DalaiNessuna valutazione finora
- 6 - Auxiliary ViewDocumento23 pagine6 - Auxiliary Viewapi-3815216100% (4)
- MIT2 003SCF11 Pset4 SolDocumento16 pagineMIT2 003SCF11 Pset4 SolDasaka BrahmendraNessuna valutazione finora
- Ees ManualDocumento313 pagineEes ManualVaibhav SarinNessuna valutazione finora
- Dynamics Solns Ch06Documento187 pagineDynamics Solns Ch06Venkat DalaiNessuna valutazione finora
- ENGN.2050-202 Assignment 15 Solution PDFDocumento7 pagineENGN.2050-202 Assignment 15 Solution PDFVenkat DalaiNessuna valutazione finora
- P T M T P: 482.59kJ/kgDocumento1 paginaP T M T P: 482.59kJ/kgVenkat DalaiNessuna valutazione finora
- ProgrammeDocumento3 pagineProgrammeEnd EndNessuna valutazione finora
- Small Changes and ApproximationsDocumento3 pagineSmall Changes and ApproximationsplokplokplokNessuna valutazione finora
- AnswersDocumento14 pagineAnswersVenkat DalaiNessuna valutazione finora
- Problem 1:: SolutionDocumento4 pagineProblem 1:: SolutionVenkat DalaiNessuna valutazione finora
- SCIENCEDocumento4 pagineSCIENCEMaria Dhalia MarquezNessuna valutazione finora
- FGW Engine Interface Module 630-088Documento3 pagineFGW Engine Interface Module 630-088David O'Sullivan92% (12)
- UTDocumento346 pagineUTramdhani100% (1)
- TheArtofAviation 10016620 PDFDocumento270 pagineTheArtofAviation 10016620 PDFangelo dosramosNessuna valutazione finora
- Multi Stage Parabolic Leaf SpringDocumento13 pagineMulti Stage Parabolic Leaf SpringahiremanojNessuna valutazione finora
- New Parallel Shaft Gearbox For Auger Drives in Biomass-HeatersDocumento3 pagineNew Parallel Shaft Gearbox For Auger Drives in Biomass-Heaterstiele_barcelosNessuna valutazione finora
- 1091-5 T SgeotDocumento11 pagine1091-5 T Sgeotvenka07Nessuna valutazione finora
- SFD & BMDDocumento44 pagineSFD & BMDAltaf Hossain100% (2)
- Industrial storage & conveying of solids in bulkDocumento32 pagineIndustrial storage & conveying of solids in bulkIrtiza RasulNessuna valutazione finora
- Optimized Design and Static, Dynamic Analysis of Disc Brake Using Finite Element AnalysisDocumento5 pagineOptimized Design and Static, Dynamic Analysis of Disc Brake Using Finite Element AnalysisVinayak ImadiNessuna valutazione finora
- Maintenence SchedulingDocumento4 pagineMaintenence SchedulingCarloVanZyl0% (1)
- Brazing Case Study Repairs Cracks in Turbine BladesDocumento15 pagineBrazing Case Study Repairs Cracks in Turbine BladesNarendra PatelNessuna valutazione finora
- 1.0 2.0 The Importance of Maintenance 3.0 Maintenance Activites 4.0 Types of MaintenanceDocumento11 pagine1.0 2.0 The Importance of Maintenance 3.0 Maintenance Activites 4.0 Types of MaintenanceIstiQamahh MuhamadNessuna valutazione finora
- Thermal Science (1) (Autosaved) - NewDocumento275 pagineThermal Science (1) (Autosaved) - NewDhruv BhardwajNessuna valutazione finora
- Systems: Chapter B-6Documento22 pagineSystems: Chapter B-6stolehaNessuna valutazione finora
- UG-6th - Online Class TTDocumento6 pagineUG-6th - Online Class TTFOODIE USNessuna valutazione finora
- Section D Grilles and RegistersDocumento227 pagineSection D Grilles and RegistersacrisostoNessuna valutazione finora
- Oil Recomendation KawasakiDocumento7 pagineOil Recomendation KawasakiM Imam Syarif SiregarNessuna valutazione finora
- API 653 Mach Exam 2022Documento9 pagineAPI 653 Mach Exam 2022Amr mohamedNessuna valutazione finora
- Fluids and Buoyancy QuizDocumento2 pagineFluids and Buoyancy QuizWaleed El ShirbeenyNessuna valutazione finora
- Brake SystemDocumento7 pagineBrake SystemJavier GarciaNessuna valutazione finora
- TOTO MRP Price List - 01-04-2019Documento65 pagineTOTO MRP Price List - 01-04-2019Joshua Gnanaraj100% (1)
- Quadracci Pavilion - Hind Bitar PDFDocumento10 pagineQuadracci Pavilion - Hind Bitar PDFHeind BitarNessuna valutazione finora
- EUROPART Inter Catalog Bus Spare Parts 2014-09 EN PDFDocumento778 pagineEUROPART Inter Catalog Bus Spare Parts 2014-09 EN PDFludiloliku67% (3)
- Choke Valvess AOPDocumento8 pagineChoke Valvess AOPclaudio godinezNessuna valutazione finora
- Mechanical Engineer Resume CAD Skills 12 Years ExperienceDocumento3 pagineMechanical Engineer Resume CAD Skills 12 Years ExperienceNilay GandhiNessuna valutazione finora
- Re 79093Documento4 pagineRe 79093Anonymous lIJl27QBXLNessuna valutazione finora
- Relative Humidity and Dew Point Reference TableDocumento1 paginaRelative Humidity and Dew Point Reference TableDawooz SaDam Onexox0% (1)
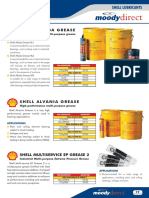
- Shell Lubricants Albida Alvania Multiservice GreasesDocumento1 paginaShell Lubricants Albida Alvania Multiservice GreasesvinothNessuna valutazione finora
- TIMBER BEAM DESIGNDocumento144 pagineTIMBER BEAM DESIGNweng paraleNessuna valutazione finora