Potrebbero piacerti anche
- MasterizacionDocumento28 pagineMasterizacionissacnochebuenaNessuna valutazione finora
- Master Calibration Fanuc PDFDocumento23 pagineMaster Calibration Fanuc PDFPrudencio Lopez LopezNessuna valutazione finora
- MasterizaciónDocumento24 pagineMasterizaciónnobamoNessuna valutazione finora
- Masterizar Robot FanucDocumento7 pagineMasterizar Robot FanucChristian García50% (2)
- Procedimiento para Masterizar Robot FanucDocumento7 pagineProcedimiento para Masterizar Robot FanucJavier Flores100% (2)
- Robot Fanuc SeatDocumento98 pagineRobot Fanuc SeatAlberto Coronado Ocegueda100% (1)
- 5 Practicas Robot NachiDocumento45 pagine5 Practicas Robot NachiJavierJBV100% (1)
- Reemplazo de Las Baterías Del ControladorDocumento1 paginaReemplazo de Las Baterías Del ControladorBobyNessuna valutazione finora
- Fanuc 20 R30 Ia 20 Ethernet IP20 Operator 20 ManualDocumento122 pagineFanuc 20 R30 Ia 20 Ethernet IP20 Operator 20 ManualoscaragNessuna valutazione finora
- Trainning Arranque RemotoDocumento8 pagineTrainning Arranque RemotoDARIO MIGUEL MARTINEZNessuna valutazione finora
- Lista de Alarmas PDFDocumento177 pagineLista de Alarmas PDFAlfonso Guerrero Rivera0% (1)
- Robot Ops V6.11SpDocumento85 pagineRobot Ops V6.11Sppedro100% (1)
- Estandar de Ford Manual FanucDocumento114 pagineEstandar de Ford Manual FanucOmar Yepiz100% (2)
- Lenguaje - Karel Fanuc PDFDocumento27 pagineLenguaje - Karel Fanuc PDFGiuseppe VarrialeNessuna valutazione finora
- Arranque RSRDocumento3 pagineArranque RSRJohan ZraghozNessuna valutazione finora
- Entrenamiento de Engrasado y Analisis de GrasaDocumento22 pagineEntrenamiento de Engrasado y Analisis de Grasatavobeto775% (16)
- Fanuc ManualDocumento20 pagineFanuc ManualnobamoNessuna valutazione finora
- Manual Intermedio MagnaDocumento57 pagineManual Intermedio Magnaarturo100% (3)
- R-30iB Mate Controller Maintenance Manual B-83525SP - 05Documento294 pagineR-30iB Mate Controller Maintenance Manual B-83525SP - 05Alvaro HorcajoNessuna valutazione finora
- Reset Srvo038Documento3 pagineReset Srvo038Anonymous t2LU6Mi100% (1)
- Vision 2D Configuración Básica (Calibracaión + Proceso de Visión)Documento16 pagineVision 2D Configuración Básica (Calibracaión + Proceso de Visión)adrianbescosNessuna valutazione finora
- Tutorial ROBOGUIDE FanucDocumento95 pagineTutorial ROBOGUIDE FanucGeraldo MaurícioNessuna valutazione finora
- Robótica Industrial FANUC - BásicoDocumento20 pagineRobótica Industrial FANUC - BásicoErick ZagalNessuna valutazione finora
- Unidad Mecánica 410ib 160 PDFDocumento194 pagineUnidad Mecánica 410ib 160 PDFSergio A. A.0% (1)
- Fanuc Manipulacion de Archivos (Back Up - Restore) (Compatibility Mode)Documento24 pagineFanuc Manipulacion de Archivos (Back Up - Restore) (Compatibility Mode)Salvador Barrón100% (1)
- Solucion Alarma SRVO-006 Hand Broken Robot PinturaDocumento1 paginaSolucion Alarma SRVO-006 Hand Broken Robot PinturaEmmanuel Alejandro Medina EsparzaNessuna valutazione finora
- Programación Espanhol FanucDocumento397 pagineProgramación Espanhol FanucAndrés M. Reyes100% (2)
- Ponencia Fanuc Arctool Jai2010 PDFDocumento31 paginePonencia Fanuc Arctool Jai2010 PDFRaizo Malig100% (1)
- Manual RoboguideDocumento12 pagineManual RoboguideAlberto HernandezNessuna valutazione finora
- Procedimiento ProfiNET CP1604 R30iBPlus Device V2Documento22 pagineProcedimiento ProfiNET CP1604 R30iBPlus Device V2Mikel Nuñez Ibañez100% (1)
- Manual de Usuario ROBOGUIDEDocumento16 pagineManual de Usuario ROBOGUIDEMiguel SimbañaNessuna valutazione finora
- Basico FanucDocumento23 pagineBasico FanucRicardo Jms100% (3)
- 0001 Curso Programación Fanuc SeguridadDocumento6 pagine0001 Curso Programación Fanuc Seguridadrguzmanabundis100% (1)
- RSR PNSDocumento10 pagineRSR PNSArturo Yañez100% (1)
- PaintTool Manual de Configuracion y Operaciones FANUC Robotics SYSTEM R-J3iBDocumento1.512 paginePaintTool Manual de Configuracion y Operaciones FANUC Robotics SYSTEM R-J3iBNahum Alamilla0% (1)
- Manuel Robot ABB-2600Documento408 pagineManuel Robot ABB-2600Tadeo Tadeo100% (2)
- B-82874SP - 08 ARC Mate 120ic M-20iA MECHANICAL UNIT Operator - PDFDocumento212 pagineB-82874SP - 08 ARC Mate 120ic M-20iA MECHANICAL UNIT Operator - PDFSergio A. A.100% (1)
- Mantenimiento Electrico Del Controlador R-30iADocumento50 pagineMantenimiento Electrico Del Controlador R-30iAHector LaraNessuna valutazione finora
- Manual Del Operador en Español para 100icDocumento394 pagineManual Del Operador en Español para 100icYosafat Sustaita83% (6)
- Manual para Respaldar Robot Fanuc RJDocumento3 pagineManual para Respaldar Robot Fanuc RJfrancisco_gomez_131100% (3)
- Automático Robot FanucDocumento3 pagineAutomático Robot FanucAlfonso Guerrero RiveraNessuna valutazione finora
- B-83195SP - 03 R-30iB Controller Maintenance Manual Ok PDFDocumento410 pagineB-83195SP - 03 R-30iB Controller Maintenance Manual Ok PDFjose francisco hinojosa aleman100% (2)
- B-83444SP - 01 M900iB - 700 MECHANICAL UNIT OPERATOR'S MANUALDocumento124 pagineB-83444SP - 01 M900iB - 700 MECHANICAL UNIT OPERATOR'S MANUALJosé Angel Noguez100% (2)
- Fanuc Password para Ver El LadderDocumento3 pagineFanuc Password para Ver El Ladderjfcastro20110% (1)
- Procedimiento para La Configuración de Los Robots ETHERNET Fanuc (Verificado)Documento22 pagineProcedimiento para La Configuración de Los Robots ETHERNET Fanuc (Verificado)arturo100% (1)
- Guia Rapida FANUCVAG PDFDocumento13 pagineGuia Rapida FANUCVAG PDFkuajarlosNessuna valutazione finora
- Curso de Programación A y B para J3iCDocumento240 pagineCurso de Programación A y B para J3iCRogerio Silva100% (3)
- Robot FANUC Manual de SeguridadDocumento51 pagineRobot FANUC Manual de SeguridadFeng Tian50% (2)
- Programacion Karel FanucDocumento27 pagineProgramacion Karel Fanucmemosurf3775Nessuna valutazione finora
- Dtos de Mantenimiento R1000ia M410icDocumento10 pagineDtos de Mantenimiento R1000ia M410iccHeQuE EzequielNessuna valutazione finora
- IO Devicenet FanucDocumento40 pagineIO Devicenet FanucJorge Alberto Davis Lomelin100% (3)
- Backup Fanuc InfoPLC Net ManualFANUCR-J3iBDocumento16 pagineBackup Fanuc InfoPLC Net ManualFANUCR-J3iBJay Cee RizoNessuna valutazione finora
- SRVO Codigo de AlarmaDocumento89 pagineSRVO Codigo de AlarmaJair ValenciaNessuna valutazione finora
- Manual Del Operador: Unidad MecánicaDocumento230 pagineManual Del Operador: Unidad Mecánicabatiste alandeteNessuna valutazione finora
- Quick Master V08Documento12 pagineQuick Master V08DARIO MIGUEL MARTINEZNessuna valutazione finora
- Procedimiento Cambio de Pilas y Calibracion Robots FanucDocumento11 pagineProcedimiento Cambio de Pilas y Calibracion Robots FanucMauricio GassmanNessuna valutazione finora
- Como Masterizar Un Robot Cuando Se Le Ha Cambiado Algún Servo MotorDocumento6 pagineComo Masterizar Un Robot Cuando Se Le Ha Cambiado Algún Servo MotorAntonio SanchezNessuna valutazione finora
- Masterizado Robot R-J, R-J2, R-J3Documento2 pagineMasterizado Robot R-J, R-J2, R-J3vulduovlakNessuna valutazione finora
- Manual Kuka 133Documento19 pagineManual Kuka 13377fenix100% (1)
- Fanuc LR MateDocumento9 pagineFanuc LR MateMoy CamarilloNessuna valutazione finora
- 3M 9320 - BARBIJO FFP2S Equiv N95Documento1 pagina3M 9320 - BARBIJO FFP2S Equiv N95fedfajNessuna valutazione finora
- Autofacil 09 2016Documento180 pagineAutofacil 09 2016proybandNessuna valutazione finora
- Campo Formativo LenguajesDocumento10 pagineCampo Formativo LenguajesLUISA MORENONessuna valutazione finora
- La Cocina de Vanguardia y El Nitrógeno LíquidoDocumento2 pagineLa Cocina de Vanguardia y El Nitrógeno LíquidoJoseFranciscoGonzalezPerezNessuna valutazione finora
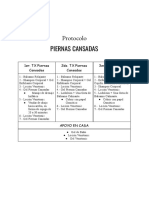
- Protocolo Piernas Cansadas: 1er. TX Piernas Cansadas 2do. TX Piernas Cansadas 3er. TX Piernas CansadasDocumento3 pagineProtocolo Piernas Cansadas: 1er. TX Piernas Cansadas 2do. TX Piernas Cansadas 3er. TX Piernas CansadasAnaNessuna valutazione finora
- Cuestionario Del 8 Al 14 PolaridadDocumento3 pagineCuestionario Del 8 Al 14 Polaridadanon_857665753Nessuna valutazione finora
- Manual-Balanza Estacionaria de Control de PesoDocumento9 pagineManual-Balanza Estacionaria de Control de PesoJosé SandovalNessuna valutazione finora
- Robot ManipuladorDocumento3 pagineRobot ManipuladorDiego VelezNessuna valutazione finora
- Plan MaestroDocumento4 paginePlan MaestroSarahi JiménezNessuna valutazione finora
- 1967 de 1995Documento8 pagine1967 de 1995api-258519048Nessuna valutazione finora
- Diferentes Periodizaciones en El Análisis de La HistoriaDocumento3 pagineDiferentes Periodizaciones en El Análisis de La HistoriaMaría Silvina NielsenNessuna valutazione finora
- Práctica 3 CARIOTIPO° RespuestaDocumento10 paginePráctica 3 CARIOTIPO° Respuestavaleria sanchezNessuna valutazione finora
- Farmacotecnia Desarrollo Actividad 2Documento8 pagineFarmacotecnia Desarrollo Actividad 2dayanaNessuna valutazione finora
- Practica #5 Tecnicas de Coloración01Documento4 paginePractica #5 Tecnicas de Coloración01neyer ivanNessuna valutazione finora
- Del Enraizamiento Cosmico A La Emregencia HumanaDocumento1 paginaDel Enraizamiento Cosmico A La Emregencia HumanaGerardo GonzalezNessuna valutazione finora
- Compendio Investigaciones Geofisicas - IGP2015Documento98 pagineCompendio Investigaciones Geofisicas - IGP2015Eder Gamarra AlvarezNessuna valutazione finora
- Flex ServomotorDocumento10 pagineFlex ServomotorH Luís DLNessuna valutazione finora
- Pulsatron Pulsafeeder Serie C Ficha Tecnica EspanolDocumento2 paginePulsatron Pulsafeeder Serie C Ficha Tecnica Espanolnelson100% (1)
- Jean Paul Margot La FelicidadDocumento32 pagineJean Paul Margot La Felicidadroromero0% (1)
- Calculo para Balanceo de Caudales y Presiones DiferencialesDocumento54 pagineCalculo para Balanceo de Caudales y Presiones DiferencialesWilliamBolivarHuaracha100% (3)
- EQ.I.45.COL Instructivo Administracion LabDocumento7 pagineEQ.I.45.COL Instructivo Administracion LabRene ParedesNessuna valutazione finora
- Ficha Técnica Instalacion Pasto en RolloDocumento7 pagineFicha Técnica Instalacion Pasto en RolloMicky Hernandez VelizNessuna valutazione finora
- SilosDocumento3 pagineSilosrjdgNessuna valutazione finora
- Triptico de AtrofiaDocumento2 pagineTriptico de AtrofiaWilfredo Torres SahuangaNessuna valutazione finora
- Resumen Artículo Contraindicaciones VasoconstrictorDocumento3 pagineResumen Artículo Contraindicaciones VasoconstrictorAlejandra LeonesNessuna valutazione finora
- PRACTICA 2 Met General 2018Documento1 paginaPRACTICA 2 Met General 2018Cintya OliveraNessuna valutazione finora
- Revista Estudios Publicos 116Documento378 pagineRevista Estudios Publicos 116OmarNessuna valutazione finora
- Diagramas Hombre MaquinaDocumento64 pagineDiagramas Hombre MaquinaDenis VargasNessuna valutazione finora
- Nomenclatura ArancelariaDocumento57 pagineNomenclatura ArancelariaKAMILA CASTRO100% (1)
- Derecho SistemicoDocumento3 pagineDerecho SistemicoMosudiNessuna valutazione finora