Potrebbero piacerti anche
- Global Multimode Carrier AggregationDocumento14 pagineGlobal Multimode Carrier Aggregationfakelogin1100% (1)
- List Komponen Line FollowerDocumento1 paginaList Komponen Line FollowerSuko AriaswantoNessuna valutazione finora
- Aerospace Science and Technology PDFDocumento33 pagineAerospace Science and Technology PDFSuko AriaswantoNessuna valutazione finora
- Ukuran Baut Hexagon Soket Head Cap ScrewDocumento10 pagineUkuran Baut Hexagon Soket Head Cap ScrewSuko AriaswantoNessuna valutazione finora
- Datasheet NEMA 17Documento4 pagineDatasheet NEMA 17Amaranta AvilaNessuna valutazione finora
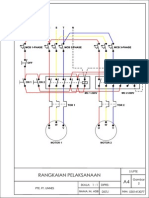
- A4 Rangkaian Pelaksanaan: R S T NDocumento1 paginaA4 Rangkaian Pelaksanaan: R S T NSuko AriaswantoNessuna valutazione finora
- Cadsoft EagleDocumento1 paginaCadsoft EagleSuko AriaswantoNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (120)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Homework 9 (Due Wednesday, September 25th)Documento4 pagineHomework 9 (Due Wednesday, September 25th)WisnuNessuna valutazione finora
- How To Become A GOOD Theoretical PhysicistDocumento4 pagineHow To Become A GOOD Theoretical PhysicistAnirudh DebNessuna valutazione finora
- Chapter 31 Electromagnetic InductionDocumento12 pagineChapter 31 Electromagnetic InductionJasmine YangNessuna valutazione finora
- J. A. Pople Auth., Henry F. Schaefer III Eds. Applications of Electronic Structure TheoryDocumento469 pagineJ. A. Pople Auth., Henry F. Schaefer III Eds. Applications of Electronic Structure TheoryFranco CentNessuna valutazione finora
- 1.4 Ellipse - General Method PDFDocumento1 pagina1.4 Ellipse - General Method PDFNarendra ChavdaNessuna valutazione finora
- Atomic Structure PDFDocumento21 pagineAtomic Structure PDFMohit TewatiaNessuna valutazione finora
- Differential Calculus PDFDocumento5 pagineDifferential Calculus PDFDroffilc Nav Cm MulihamNessuna valutazione finora
- Physics InvestigatoryDocumento24 paginePhysics InvestigatoryAarti Sharma100% (1)
- Math162 Calculus Ii Korea UniversityDocumento23 pagineMath162 Calculus Ii Korea UniversityTae Jin JeongNessuna valutazione finora
- A Level Physics RAGDocumento4 pagineA Level Physics RAGhinaNessuna valutazione finora
- CH211 2016 Syllabus 물리화학IDocumento2 pagineCH211 2016 Syllabus 물리화학I김승희Nessuna valutazione finora
- Green's FunctionsDocumento118 pagineGreen's FunctionsThomas Manning100% (2)
- A Warp Drive' With More Reasonable Total Energy RequirementsDocumento9 pagineA Warp Drive' With More Reasonable Total Energy RequirementsCarlos BorrNessuna valutazione finora
- (TED) Rotations ActivityDocumento4 pagine(TED) Rotations ActivityMoosey98Nessuna valutazione finora
- Module 1 Coulombs LawDocumento22 pagineModule 1 Coulombs LawJewel EmeraldNessuna valutazione finora
- F.faggin PaperDocumento31 pagineF.faggin PaperAdaNessuna valutazione finora
- Worksheet 5Documento2 pagineWorksheet 5Argie MontalesNessuna valutazione finora
- Homework 1 For Cálculo MultivariableDocumento2 pagineHomework 1 For Cálculo MultivariableDenis LiquidoNessuna valutazione finora
- Electromagnetic Boundary ConditionDocumento7 pagineElectromagnetic Boundary ConditionravindarsinghNessuna valutazione finora
- Unit 2Documento33 pagineUnit 2smrutirekhaNessuna valutazione finora
- LAG Sample Written ExamDocumento2 pagineLAG Sample Written ExamEda ÖztürkNessuna valutazione finora
- Background Material Crib-Sheet: 1 Probability TheoryDocumento4 pagineBackground Material Crib-Sheet: 1 Probability TheorynishanthpsNessuna valutazione finora
- Carter-Chapter 7Documento30 pagineCarter-Chapter 7chemiekenNessuna valutazione finora
- Chapter 2, Stress, Principal Stresses, Strain EnergyDocumento13 pagineChapter 2, Stress, Principal Stresses, Strain Energyhemant18augNessuna valutazione finora
- Chemical LawsDocumento12 pagineChemical LawsArjunNessuna valutazione finora
- Area Under The CurveDocumento3 pagineArea Under The CurveSubrata KarmakarNessuna valutazione finora
- Assignment 3 - CosmologyDocumento2 pagineAssignment 3 - CosmologyJanath De SilvaNessuna valutazione finora
- 1 Schwarzschild MetricDocumento4 pagine1 Schwarzschild MetricMatejaBoskovicNessuna valutazione finora
- IAS - Chemistry - SB1 - Mark Scheme - T2 PDFDocumento3 pagineIAS - Chemistry - SB1 - Mark Scheme - T2 PDFLoh Jun XianNessuna valutazione finora
- Welding Matlab CodeDocumento16 pagineWelding Matlab Codevenkat27081995Nessuna valutazione finora