Potrebbero piacerti anche
- Ódulo: B1 Funções Periódicas e Não Periódicas Ano: 11.ºDocumento5 pagineÓdulo: B1 Funções Periódicas e Não Periódicas Ano: 11.ºIolanda SantosNessuna valutazione finora
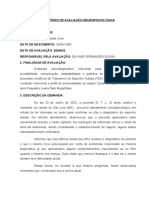
- LAUDO NEUROPSICOLOGICO GeovannyDocumento8 pagineLAUDO NEUROPSICOLOGICO GeovannyDayane Fernandes95% (21)
- Jogos Tradicionais - Ed Fisica - TextoDocumento12 pagineJogos Tradicionais - Ed Fisica - TextoGustavo luisNessuna valutazione finora
- Modelo Laudo Orientação VocacionalDocumento3 pagineModelo Laudo Orientação VocacionalGiovana Mariano100% (1)
- RDC #36, de 25 de Julho de 2013 - Segurança Do Paciente em Serviços de SaúdeDocumento2 pagineRDC #36, de 25 de Julho de 2013 - Segurança Do Paciente em Serviços de SaúdeJu FelícioNessuna valutazione finora
- Aula 1 1o Sem - Estatistica - 2020 - Parte 1 16 03 20Documento46 pagineAula 1 1o Sem - Estatistica - 2020 - Parte 1 16 03 20Carlos Alberto SouzaNessuna valutazione finora
- Anexo 1-GeopolíticaDocumento3 pagineAnexo 1-GeopolíticaMARLON SILVA DE SOUZANessuna valutazione finora
- Inventario MoralDocumento6 pagineInventario MoralGuilherme LeopoldoNessuna valutazione finora
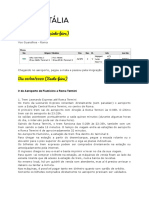
- Guia Da Viagem 2023Documento25 pagineGuia Da Viagem 2023Bruna MachadoNessuna valutazione finora
- Ácido Tranexamico e Associações No Tratamento Do MelasmaDocumento9 pagineÁcido Tranexamico e Associações No Tratamento Do MelasmaLeticia Guerra DalastraNessuna valutazione finora
- Ora Et LaboraDocumento10 pagineOra Et LaboraRañoa Dolom Alvin NeilNessuna valutazione finora
- DespachanteDocumento6 pagineDespachanteRac A BruxaNessuna valutazione finora
- Prova em Processo PenalDocumento141 pagineProva em Processo PenalSofia OliveiraNessuna valutazione finora
- 01-03-2024 Classificação Dos SubstantivosDocumento4 pagine01-03-2024 Classificação Dos SubstantivosLucinei Guilherme NevesNessuna valutazione finora
- Uso Do Tambor XamanicoDocumento11 pagineUso Do Tambor XamanicoAdilaTrubat0% (1)
- Trabalho de Campo - MICDocumento11 pagineTrabalho de Campo - MICRafaelNessuna valutazione finora
- Entre Letras 4 Teoria COMPLETO260421Documento114 pagineEntre Letras 4 Teoria COMPLETO260421Maristella GalvãoNessuna valutazione finora
- Wladimir Pomar - 1991 Rasgando A CortinaDocumento142 pagineWladimir Pomar - 1991 Rasgando A CortinaFrancisco PrandiNessuna valutazione finora
- Edifícios InteligentesDocumento137 pagineEdifícios InteligentesCarlos LusvarghiNessuna valutazione finora
- Aprendendo Com Os Erros de SaulDocumento3 pagineAprendendo Com Os Erros de SaulDionildo Dantas100% (1)
- Godofredo Rangel Vida Ociosa A Filha Vol.1Documento250 pagineGodofredo Rangel Vida Ociosa A Filha Vol.1José Paulo Couto Dos Santos MonteiroNessuna valutazione finora
- Questões PlatoonDocumento2 pagineQuestões PlatoonMarta AlegriaNessuna valutazione finora
- OEPDocumento485 pagineOEPDann SendaNessuna valutazione finora
- Foice Do Vazio Furia Do Corte Esquecido de GuinssoDocumento4 pagineFoice Do Vazio Furia Do Corte Esquecido de GuinssoJokerNooxNessuna valutazione finora
- Questionario EticaDocumento6 pagineQuestionario EticaEANessuna valutazione finora
- 4T2018 L6 Slides CaramuruDocumento27 pagine4T2018 L6 Slides CaramuruAdelino FilhoNessuna valutazione finora
- Valvulas HidraulicasDocumento26 pagineValvulas HidraulicasAnisio André Carlos ManhiçaNessuna valutazione finora
- Apresentação Pen TestDocumento13 pagineApresentação Pen TestEduardo HonoratoNessuna valutazione finora
- Categorias Da PedagogiaDocumento3 pagineCategorias Da PedagogiaArsénio Sadique Aualo83% (6)
- ATOS PROCESSUAIS ResumoDocumento24 pagineATOS PROCESSUAIS Resumoamanda crippaNessuna valutazione finora