Potrebbero piacerti anche
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Clandestine Chemistry Primer & FAQDocumento32 pagineClandestine Chemistry Primer & FAQgalloway1375% (4)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Do It Yourself - Summer 2016 PDFDocumento116 pagineDo It Yourself - Summer 2016 PDFMiguel Perez0% (3)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- X RAY Residual StressDocumento36 pagineX RAY Residual StressAnonymous oTrMza100% (1)
- Simplified Seismic Analysis Procedures For Elevated TanksDocumento19 pagineSimplified Seismic Analysis Procedures For Elevated TanksCesar Yoshio Sanchez HuchiyamaNessuna valutazione finora
- Ohe Fitting GuidelineDocumento56 pagineOhe Fitting Guidelinepretha56Nessuna valutazione finora
- The Preparation of Potassium Tris (Oxalate) Ferrate (III) TrihydrateDocumento8 pagineThe Preparation of Potassium Tris (Oxalate) Ferrate (III) Trihydrateapple33% (6)
- ME Vol 2 FMDocumento364 pagineME Vol 2 FMDeepak Gupta100% (4)
- Shear Friction MattockDocumento10 pagineShear Friction MattockSisina Anish100% (1)
- Ultra High Performance Concrete BridgesDocumento199 pagineUltra High Performance Concrete BridgesMiguel Perez100% (1)
- 2015 JC2 H2 Carboxylic Acids and Derivatives Part 1 Tutorial (Teachers) UpdatedDocumento18 pagine2015 JC2 H2 Carboxylic Acids and Derivatives Part 1 Tutorial (Teachers) UpdatedJohnNessuna valutazione finora
- 0420 - 118T3440 - Cooling WaterDocumento2 pagine0420 - 118T3440 - Cooling WaterfaisalnadimNessuna valutazione finora
- Clay Brick MakingDocumento9 pagineClay Brick MakingapihanasNessuna valutazione finora
- 121Documento39 pagine121Hendra RuhunussaNessuna valutazione finora
- Science 10 LAS Q4Documento73 pagineScience 10 LAS Q4Dennis75% (4)
- Ch3 SolutionsDocumento64 pagineCh3 Solutionsmohimran2002100% (1)
- Consistent Derivation of A Beam Model From The Saint Venant's Solid Model. International Journal of Solids and StructuresDocumento28 pagineConsistent Derivation of A Beam Model From The Saint Venant's Solid Model. International Journal of Solids and StructuresMiguel PerezNessuna valutazione finora
- Study On Erection Control Scheme For Long Span Steel Arch Bridge and Its Application On Chaotianmen Yangtze River BridgesDocumento14 pagineStudy On Erection Control Scheme For Long Span Steel Arch Bridge and Its Application On Chaotianmen Yangtze River BridgesMiguel PerezNessuna valutazione finora
- Case Studies For Steel Bridge Erection Conventional, Lateral Slides and Incremental LaunchingDocumento9 pagineCase Studies For Steel Bridge Erection Conventional, Lateral Slides and Incremental LaunchingMiguel PerezNessuna valutazione finora
- Incremental Launching of Composite Bridge Deck Ch198Documento6 pagineIncremental Launching of Composite Bridge Deck Ch198Miguel PerezNessuna valutazione finora
- Niterói, Volgograd and Trans-Tokyo Bay Steel Bridge Decks Abraham - Sanchez - Corriols - 2de2Documento135 pagineNiterói, Volgograd and Trans-Tokyo Bay Steel Bridge Decks Abraham - Sanchez - Corriols - 2de2Miguel PerezNessuna valutazione finora
- W&H Feel Good You - Spring 2016 PDFDocumento148 pagineW&H Feel Good You - Spring 2016 PDFMiguel PerezNessuna valutazione finora
- Finite Element Modelling For Static Behaviour Analysis of Suspension Bridges With Varying Rigidity of Main CablesDocumento8 pagineFinite Element Modelling For Static Behaviour Analysis of Suspension Bridges With Varying Rigidity of Main CablesMiguel PerezNessuna valutazione finora
- CH 07Documento39 pagineCH 07Anonymous 55cH67eIxNessuna valutazione finora
- LDL FactorizacionDocumento7 pagineLDL FactorizacionMiguel PerezNessuna valutazione finora
- Biotecnologia de Microalgas (1988 R) - (De La Noue and de Pauw) - The Potential of Microalgal Biotechnology A Review of Production and Uses of MicroalgaeDocumento46 pagineBiotecnologia de Microalgas (1988 R) - (De La Noue and de Pauw) - The Potential of Microalgal Biotechnology A Review of Production and Uses of MicroalgaeAlexsandro ClaudinoNessuna valutazione finora
- Ece PDFDocumento36 pagineEce PDFGnaneshwar KandukuriNessuna valutazione finora
- Chem 40.1 Msds Exer 6Documento7 pagineChem 40.1 Msds Exer 6Angela Sietereales RamosNessuna valutazione finora
- Uni of Frankfurt - Thermodynamic PotentialsDocumento15 pagineUni of Frankfurt - Thermodynamic PotentialstaboogaNessuna valutazione finora
- Fund - Elect DE52.Documento355 pagineFund - Elect DE52.atashi baran mohantyNessuna valutazione finora
- Diatoms Diversity in Pune Fresh Water Bodies: Mula, Mutha and PashanDocumento5 pagineDiatoms Diversity in Pune Fresh Water Bodies: Mula, Mutha and PashanhgaonkarNessuna valutazione finora
- Cape Biology Unit 2 Lab PDF FreeDocumento4 pagineCape Biology Unit 2 Lab PDF FreeChanel clarksonNessuna valutazione finora
- Solidtate Physics HW1Documento2 pagineSolidtate Physics HW1Priti GuptaNessuna valutazione finora
- 1 - Introduction of EOR (TK)Documento34 pagine1 - Introduction of EOR (TK)Fathurrahman RasyidNessuna valutazione finora
- DJ 10 CM Plate: MJ MJDocumento9 pagineDJ 10 CM Plate: MJ MJredspidey13100% (2)
- Isolation and Alkaline Hydrolysis of The Protein GlutenDocumento5 pagineIsolation and Alkaline Hydrolysis of The Protein GlutenTiffany EspirituNessuna valutazione finora
- Dispersion Characteristics of Substrate IntegratedDocumento3 pagineDispersion Characteristics of Substrate IntegratedUsman QureshiNessuna valutazione finora
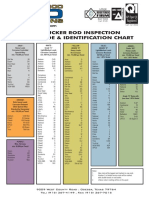
- Permian Rod Operations - Sucker Rod Identification Chart PDFDocumento1 paginaPermian Rod Operations - Sucker Rod Identification Chart PDFMinimaxou78Nessuna valutazione finora
- Safety Data Sheets: 1. Identification of The Substance/mixture and of The Company/undertakingDocumento6 pagineSafety Data Sheets: 1. Identification of The Substance/mixture and of The Company/undertakingIgor IgorNessuna valutazione finora
- Factual ReportDocumento7 pagineFactual Reportlukman arifNessuna valutazione finora
- PhysicsDocumento396 paginePhysicsGreeny34Nessuna valutazione finora
- Calcium Oxide: 1. Product IdentificationDocumento4 pagineCalcium Oxide: 1. Product IdentificationLION_FIRENessuna valutazione finora
- Chem Record AnalysisDocumento7 pagineChem Record AnalysisKasi Bala Guru VNessuna valutazione finora