Potrebbero piacerti anche
- PMU SpecificationDocumento13 paginePMU Specificationabhi120783Nessuna valutazione finora
- Procurement Timeline PDFDocumento1 paginaProcurement Timeline PDFSyed Faizan AliNessuna valutazione finora
- CPPA Report 2018Documento119 pagineCPPA Report 2018Juma GulNessuna valutazione finora
- Imoact On Petroleum Products PDFDocumento1 paginaImoact On Petroleum Products PDFSyed Faizan AliNessuna valutazione finora
- Impact of Covid On Import of PetrolDocumento1 paginaImpact of Covid On Import of PetrolSyed Faizan AliNessuna valutazione finora
- Punjab Ujala Program Timelines: Issuance of MomDocumento4 paginePunjab Ujala Program Timelines: Issuance of MomSyed Faizan AliNessuna valutazione finora
- 7.3kW Solar PV System Details for Day and Night LoadsDocumento1 pagina7.3kW Solar PV System Details for Day and Night LoadsSyed Faizan AliNessuna valutazione finora
- Long-Term Electricity Demand Forecast and Supply Side Scenarios For Pakistan (2015-2050) : A LEAP Model Application For Policy AnalysisDocumento16 pagineLong-Term Electricity Demand Forecast and Supply Side Scenarios For Pakistan (2015-2050) : A LEAP Model Application For Policy AnalysisSyed Faizan AliNessuna valutazione finora
- Load Detail and System DesignDocumento1 paginaLoad Detail and System DesignSyed Faizan AliNessuna valutazione finora
- AC Side: Fault Type Faults Year Unit Frequency RemarksDocumento1 paginaAC Side: Fault Type Faults Year Unit Frequency RemarksSyed Faizan AliNessuna valutazione finora
- Imoact On Petroleum Products PDFDocumento1 paginaImoact On Petroleum Products PDFSyed Faizan AliNessuna valutazione finora
- Imoact On Petroleum Products PDFDocumento1 paginaImoact On Petroleum Products PDFSyed Faizan AliNessuna valutazione finora
- Course DescriptionsDocumento1 paginaCourse DescriptionsSyed Faizan AliNessuna valutazione finora
- 2018 U.S. Utility-Scale PV-Plus-Storage Cost BenchmarkDocumento32 pagine2018 U.S. Utility-Scale PV-Plus-Storage Cost BenchmarkSyed Faizan AliNessuna valutazione finora
- Evaluation of TenderDocumento4 pagineEvaluation of TenderSyed Faizan AliNessuna valutazione finora
- Monitoring of Energy FlowDocumento6 pagineMonitoring of Energy FlowSyed Faizan AliNessuna valutazione finora
- Project Charter: Project Title: Project Sponsor: Date Prepared: Project Manager: Project Customer: JustificationDocumento4 pagineProject Charter: Project Title: Project Sponsor: Date Prepared: Project Manager: Project Customer: Justificationscribd_spiceNessuna valutazione finora
- Exciting Transformer Reactive CurrentDocumento3 pagineExciting Transformer Reactive CurrentSyed Faizan AliNessuna valutazione finora
- Network Analysis by Van Valkenburg Solution CHAP#6Documento21 pagineNetwork Analysis by Van Valkenburg Solution CHAP#6Husnain100% (2)
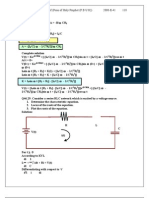
- EE 519 Advanced Power System AnalysisDocumento3 pagineEE 519 Advanced Power System AnalysisSyed Faizan AliNessuna valutazione finora
- Lecture19 PDFDocumento7 pagineLecture19 PDFSyed Faizan AliNessuna valutazione finora
- EE504 AdvancedHighVoltageEngineeringDocumento2 pagineEE504 AdvancedHighVoltageEngineeringSyed Faizan AliNessuna valutazione finora
- Lecture 6Documento18 pagineLecture 6Edi Siswanto0% (1)
- Temporary Overvoltages in Power SystemDocumento57 pagineTemporary Overvoltages in Power SystemSyed Faizan AliNessuna valutazione finora
- Temporary Overvoltages in Power SystemDocumento57 pagineTemporary Overvoltages in Power SystemSyed Faizan AliNessuna valutazione finora
- Power Quality GhoshDocumento73 paginePower Quality GhoshukarthikbhelNessuna valutazione finora
- Lecture#11Documento487 pagineLecture#11Syed Faizan AliNessuna valutazione finora
- PSSEDocumento6 paginePSSESyed Faizan AliNessuna valutazione finora
- Upfc Power FlowcontrolDocumento5 pagineUpfc Power FlowcontrolRaghav Tu Jane NaaNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- API 5l Grade l245 PipesDocumento1 paginaAPI 5l Grade l245 PipesMitul MehtaNessuna valutazione finora
- Gas Stop HTDocumento1 paginaGas Stop HTbagus918Nessuna valutazione finora
- Clements High School Celebrating 30 Years of Academic ExcellenceDocumento22 pagineClements High School Celebrating 30 Years of Academic ExcellenceclementsrangersNessuna valutazione finora
- Soalan Assignment Stm10173Documento7 pagineSoalan Assignment Stm10173Razanah RozaimayNessuna valutazione finora
- (CIDECT DG1) - Design Guide For Circular Hollow Section (CHS) Joints Under Predominantly Static LoadingDocumento142 pagine(CIDECT DG1) - Design Guide For Circular Hollow Section (CHS) Joints Under Predominantly Static Loading_at_to_50% (2)
- The basics of biomass roofing materialsDocumento35 pagineThe basics of biomass roofing materialsLakshmi PillaiNessuna valutazione finora
- S393 SPM Lopl Opr MS 2301 - 0Documento134 pagineS393 SPM Lopl Opr MS 2301 - 0Barm FuttNessuna valutazione finora
- Ignition Characteristics of Cracked JP-7 FuelDocumento4 pagineIgnition Characteristics of Cracked JP-7 Fuelfahrul3xNessuna valutazione finora
- AGAR ID 200 Series Brochure LowRes Electronic and WebDocumento2 pagineAGAR ID 200 Series Brochure LowRes Electronic and WebYareli de la CruzNessuna valutazione finora
- Soil Analysis Bitupan LastDocumento25 pagineSoil Analysis Bitupan Lastbitupon boraNessuna valutazione finora
- MVE XC Series Dewars | Millennium XC 20 | XC 21/6 | XC 22/5 | XC 32/8 | XC 33/22 | XC 34/18 | XC 34/18 Plus | XC 43/28 | XC 47/11-10 | XC 47/11-6 | XC 47/11-6 2 Square | XC 47/11-6 3 | Sample Storage DewarsDocumento14 pagineMVE XC Series Dewars | Millennium XC 20 | XC 21/6 | XC 22/5 | XC 32/8 | XC 33/22 | XC 34/18 | XC 34/18 Plus | XC 43/28 | XC 47/11-10 | XC 47/11-6 | XC 47/11-6 2 Square | XC 47/11-6 3 | Sample Storage DewarsPrincestonNessuna valutazione finora
- Pilot Valve Boxes SG110ADocumento2 paginePilot Valve Boxes SG110AVictor Ruiz FuentesNessuna valutazione finora
- Summit Archive 1569863860Documento50 pagineSummit Archive 1569863860mangelchavezNessuna valutazione finora
- Cotización FM2Documento2 pagineCotización FM2Anonymous 3o4Mwew0Nessuna valutazione finora
- ASSAM - Uniform Zoning Regulation 2000Documento35 pagineASSAM - Uniform Zoning Regulation 2000rajatesh1Nessuna valutazione finora
- Experiment Central 2010Documento1.481 pagineExperiment Central 2010D BASU100% (1)
- Chem 31.1 Midterms Reviewer Experiment 1: Solubility of Organic CompoundsDocumento6 pagineChem 31.1 Midterms Reviewer Experiment 1: Solubility of Organic CompoundsSteffi GatdulaNessuna valutazione finora
- Wireless Communication Assignment-1Documento2 pagineWireless Communication Assignment-1rajeshkecNessuna valutazione finora
- LDM CuNi7Zn39Pb3Mn2 MSDSDocumento4 pagineLDM CuNi7Zn39Pb3Mn2 MSDSmp87_ingNessuna valutazione finora
- SEP2 MeterViewDocumento23 pagineSEP2 MeterViewmarcofffmota3196Nessuna valutazione finora
- Aoc Le32w136 TVDocumento82 pagineAoc Le32w136 TVMarcos Jara100% (4)
- EC6302 - Digital ElectronicsDocumento6 pagineEC6302 - Digital ElectronicsAdal ArasuNessuna valutazione finora
- Crompton ProjectDocumento110 pagineCrompton Projectarunkcmt0% (2)
- Challenges Faced by PET ConvertorDocumento35 pagineChallenges Faced by PET ConvertorRakeshjha75Nessuna valutazione finora
- Iso Noremark 2 PDFDocumento86 pagineIso Noremark 2 PDFAkhmad MakhrusNessuna valutazione finora
- Accuret-A20: Electrical SpecificationsDocumento2 pagineAccuret-A20: Electrical SpecificationsClaudio CalabreseNessuna valutazione finora
- The Shell and Shell Scripting: Echo $SHELL - To See The Working Shell in SSHDocumento12 pagineThe Shell and Shell Scripting: Echo $SHELL - To See The Working Shell in SSHThai PhuongNessuna valutazione finora
- Beer and Johnston Detailed Table of ContentsDocumento10 pagineBeer and Johnston Detailed Table of Contentsdhruv001Nessuna valutazione finora
- Iec61000 4 7 (Ed2.0) en - DDocumento8 pagineIec61000 4 7 (Ed2.0) en - Dtwinvbooks100% (1)
- UAE Visa Occupation ListDocumento89 pagineUAE Visa Occupation ListSiddharth JaloriNessuna valutazione finora