Potrebbero piacerti anche
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- TV LCD InfoDocumento159 pagineTV LCD InfoWelington Garcia100% (10)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Töpke Claus - Network Programming and Automation Essentials - 2023Documento296 pagineTöpke Claus - Network Programming and Automation Essentials - 2023jifoliy988Nessuna valutazione finora
- Electronicdesign 24523 11myths Tls PdflayoutDocumento3 pagineElectronicdesign 24523 11myths Tls PdflayoutWelington GarciaNessuna valutazione finora
- Electronicdesign 24523 11myths Tls PdflayoutDocumento3 pagineElectronicdesign 24523 11myths Tls PdflayoutWelington GarciaNessuna valutazione finora
- HCF Spec 54 8.1 PDFDocumento90 pagineHCF Spec 54 8.1 PDFvikulovNessuna valutazione finora
- Data Link LayerDocumento43 pagineData Link LayerVenkatakrishnan SubramaniyanNessuna valutazione finora
- Intro To 5G New Radio - Technical ArticlesDocumento8 pagineIntro To 5G New Radio - Technical ArticlesWelington GarciaNessuna valutazione finora
- Annual Update On Lithium-Ion Battery Technology White Paper by Inventus PowerDocumento11 pagineAnnual Update On Lithium-Ion Battery Technology White Paper by Inventus PowerDanial SadiqNessuna valutazione finora
- Fiber Optics Video Basics Users GuideDocumento22 pagineFiber Optics Video Basics Users GuideWelington GarciaNessuna valutazione finora
- VTS White PaperDocumento16 pagineVTS White PapervoipnetworkNessuna valutazione finora
- 5G Deployment Handbook by VIAVI SolutionsDocumento17 pagine5G Deployment Handbook by VIAVI SolutionsWelington GarciaNessuna valutazione finora
- (Mohammed M. Alani) Guide To OSI and TCPIP ModelsDocumento58 pagine(Mohammed M. Alani) Guide To OSI and TCPIP Modelsputolov100% (2)
- How To Transmit 4k Video 10gbps WirelesslyDocumento9 pagineHow To Transmit 4k Video 10gbps WirelesslyWelington GarciaNessuna valutazione finora
- 5G and Wi-Fi 6: Stronger Together: Monica Paolini, Senza FiliDocumento10 pagine5G and Wi-Fi 6: Stronger Together: Monica Paolini, Senza FiliWelington GarciaNessuna valutazione finora
- Wireless Video User's GuideDocumento11 pagineWireless Video User's GuidedarwinNessuna valutazione finora
- TBS 2956 All in One DVB IPTV GatewayDocumento1 paginaTBS 2956 All in One DVB IPTV GatewayWelington GarciaNessuna valutazione finora
- Designing Poe Switching Supplies For Input Power Sharing and With Power LimitingDocumento7 pagineDesigning Poe Switching Supplies For Input Power Sharing and With Power LimitingWelington GarciaNessuna valutazione finora
- Pan3401 Ps/2 Optical Mouse Single Chip General DescriptionDocumento15 paginePan3401 Ps/2 Optical Mouse Single Chip General DescriptionWelington GarciaNessuna valutazione finora
- How To Improve PFC Light-Load Efficiency: by Bosheng SunDocumento6 pagineHow To Improve PFC Light-Load Efficiency: by Bosheng SunWelington GarciaNessuna valutazione finora
- An2018 Gigabit LTE DeploymentsDocumento21 pagineAn2018 Gigabit LTE DeploymentsWilliam Henry Mbom MaihNessuna valutazione finora
- Designing Poe Switching Supplies For Input Power Sharing and With Power LimitingDocumento7 pagineDesigning Poe Switching Supplies For Input Power Sharing and With Power LimitingWelington GarciaNessuna valutazione finora
- TBS2956 User Guide: FeaturesDocumento6 pagineTBS2956 User Guide: FeaturesWelington GarciaNessuna valutazione finora
- OM02 Optical Mouse Sensor Data Sheet: IndexDocumento8 pagineOM02 Optical Mouse Sensor Data Sheet: Indexakvii7Nessuna valutazione finora
- TBS2956 Insdustrial Media Server: Key FeaturesDocumento2 pagineTBS2956 Insdustrial Media Server: Key FeaturesWelington GarciaNessuna valutazione finora
- Ac V700a PDFDocumento3 pagineAc V700a PDFWelington GarciaNessuna valutazione finora
- Design LED Backlight FreescaleDocumento38 pagineDesign LED Backlight FreescaleWelington GarciaNessuna valutazione finora
- Radiation Detector PDFDocumento12 pagineRadiation Detector PDFWelington Garcia100% (1)
- BS45 IcdDocumento23 pagineBS45 IcdWelington GarciaNessuna valutazione finora
- Defective Pixels in Defective Pixels in Liquid Crystal Displays Liquid Crystal DisplaysDocumento3 pagineDefective Pixels in Defective Pixels in Liquid Crystal Displays Liquid Crystal DisplaysTrijeth DatlaNessuna valutazione finora
- FastCAP Chipultracapacit SSDsDocumento9 pagineFastCAP Chipultracapacit SSDsWelington GarciaNessuna valutazione finora
- Touch Panel Tranning Presentation SID 2014 Short Course S1Documento196 pagineTouch Panel Tranning Presentation SID 2014 Short Course S1Welington GarciaNessuna valutazione finora
- PCB B REV 2 schematic guideDocumento1 paginaPCB B REV 2 schematic guideBussy PaulNessuna valutazione finora
- Apc Back Ups Bk300mi, Bk500mi - 3Documento1 paginaApc Back Ups Bk300mi, Bk500mi - 3Eduardo Lorenzetti Pellini100% (1)
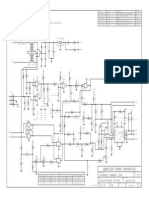
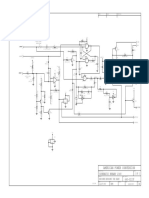
- Power Supply Circuit Board SchematicDocumento1 paginaPower Supply Circuit Board SchematicWelington GarciaNessuna valutazione finora
- CCN MCQDocumento2 pagineCCN MCQAtharvNessuna valutazione finora
- S8VK-X Switch-Mode Power Supplies Communications ManualDocumento58 pagineS8VK-X Switch-Mode Power Supplies Communications ManualsunhuynhNessuna valutazione finora
- BCS 041 Previous Year Question Papers by IgnouassignmentguruDocumento45 pagineBCS 041 Previous Year Question Papers by IgnouassignmentguruaddNessuna valutazione finora
- Lab 3 - Remote Access and Securing your SwitchDocumento14 pagineLab 3 - Remote Access and Securing your SwitchFyon ChinNessuna valutazione finora
- Program Structure for MCA (2-years) at Manipur UniversityDocumento87 pagineProgram Structure for MCA (2-years) at Manipur UniversityDarmoni LaishramNessuna valutazione finora
- OSI Data Link Layer: CCNA Exploration Semester 1Documento20 pagineOSI Data Link Layer: CCNA Exploration Semester 1palogjohnjrNessuna valutazione finora
- cs601 Behrooz A Feroozan Midterm McqsDocumento22 paginecs601 Behrooz A Feroozan Midterm McqsExpert princeNessuna valutazione finora
- Umts Optimization ParameterDocumento9 pagineUmts Optimization ParameterManish ChaturvediNessuna valutazione finora
- CCNA-Internship PresentationDocumento19 pagineCCNA-Internship Presentationshiva sai donthulaNessuna valutazione finora
- M.Tech Syllabus, UCOE, Punjabi University, PatialaDocumento47 pagineM.Tech Syllabus, UCOE, Punjabi University, PatialagurusodhiiNessuna valutazione finora
- Set Up Computer NetworkDocumento19 pagineSet Up Computer NetworkJay MichaelNessuna valutazione finora
- Project ReportDocumento16 pagineProject ReportMukesh BishtNessuna valutazione finora
- Presentation On Computer's Network: Topic:-Framing & It's MethodsDocumento15 paginePresentation On Computer's Network: Topic:-Framing & It's MethodsaksharNessuna valutazione finora
- Computer Networks Lecture NotesDocumento50 pagineComputer Networks Lecture NotesRam Kumar0% (1)
- EI2401-Industrial Data NetworksDocumento11 pagineEI2401-Industrial Data NetworksarumugamNessuna valutazione finora
- CC3502 Computer Networks: Multiplexing and IP Address Tutorial SolutionsDocumento4 pagineCC3502 Computer Networks: Multiplexing and IP Address Tutorial Solutionsmgayanan100% (1)
- Distributed Information Systems: Lecture9 - Networkingbasics: Osi Model Basedon Agrawalandsharma, ProspectpressDocumento172 pagineDistributed Information Systems: Lecture9 - Networkingbasics: Osi Model Basedon Agrawalandsharma, ProspectpressSaitejNessuna valutazione finora
- Distributed System PDFDocumento148 pagineDistributed System PDFSAFIKURESHI MONDALNessuna valutazione finora
- Introduction To LAN and WAN PDFDocumento19 pagineIntroduction To LAN and WAN PDFIbra NazlaNessuna valutazione finora
- 01-UA5000 Technical ManualDocumento107 pagine01-UA5000 Technical ManualyaminuvicNessuna valutazione finora
- Standard EthernetDocumento39 pagineStandard EthernetAishwaryaNessuna valutazione finora
- 4 ss7Documento70 pagine4 ss7Ahmed HossamNessuna valutazione finora
- Short - Long Question Answers DCCNDocumento7 pagineShort - Long Question Answers DCCNlathaNessuna valutazione finora
- Osi Layer and Communication Between Two Node in A NetworkDocumento11 pagineOsi Layer and Communication Between Two Node in A NetworkAbhishek BohraNessuna valutazione finora