Potrebbero piacerti anche
- SBI Clerk Reasoning Previous Year QuestionsDocumento32 pagineSBI Clerk Reasoning Previous Year QuestionsAalen IssacNessuna valutazione finora
- Pune Cantonment Official Notification and VacanciesDocumento2 paginePune Cantonment Official Notification and VacanciesAalen IssacNessuna valutazione finora
- APSC Exam CalendarDocumento3 pagineAPSC Exam CalendarAalen IssacNessuna valutazione finora
- Pune Cantonment Official Notification - TestbookDocumento10 paginePune Cantonment Official Notification - TestbookAalen IssacNessuna valutazione finora
- SBI Clerk English Previous Years QuestionsDocumento21 pagineSBI Clerk English Previous Years QuestionsAalen IssacNessuna valutazione finora
- Pune Cantonment Official Notification - TestbookDocumento10 paginePune Cantonment Official Notification - TestbookAalen IssacNessuna valutazione finora
- SSC CHSL Previous Years Questions GKDocumento52 pagineSSC CHSL Previous Years Questions GKAalen IssacNessuna valutazione finora
- SBI Clerk English Previous Years QuestionsDocumento24 pagineSBI Clerk English Previous Years QuestionsAalen IssacNessuna valutazione finora
- SBI Clerk Reasoning Previous Year QuestionDocumento33 pagineSBI Clerk Reasoning Previous Year QuestionAalen IssacNessuna valutazione finora
- SBI Clerk English Previous Years QuestionsDocumento25 pagineSBI Clerk English Previous Years QuestionsAalen IssacNessuna valutazione finora
- SBI Clerk English Previous Years QuestionsDocumento25 pagineSBI Clerk English Previous Years QuestionsAalen IssacNessuna valutazione finora
- Official Notification PGCIL Diploma Trainee JR Officer Trainee PostsDocumento4 pagineOfficial Notification PGCIL Diploma Trainee JR Officer Trainee PostsAalen IssacNessuna valutazione finora
- SBI Clerk English Previous Years QuestionsDocumento24 pagineSBI Clerk English Previous Years QuestionsAalen IssacNessuna valutazione finora
- SBI Clerk Reasoning Previous Year QuestionsDocumento35 pagineSBI Clerk Reasoning Previous Year QuestionsAalen IssacNessuna valutazione finora
- ITBP Official NotificationDocumento21 pagineITBP Official NotificationAalen IssacNessuna valutazione finora
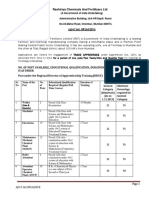
- RCF Official Notification - TestbookDocumento9 pagineRCF Official Notification - TestbookAalen IssacNessuna valutazione finora
- SSC CHSL Previous Years Questions GKDocumento52 pagineSSC CHSL Previous Years Questions GKAalen IssacNessuna valutazione finora
- IOCL Recruitment Official Notification Gujarat RefinaryDocumento7 pagineIOCL Recruitment Official Notification Gujarat RefinaryAalen IssacNessuna valutazione finora
- RBI Governors GK Notes PDFDocumento5 pagineRBI Governors GK Notes PDFAalen IssacNessuna valutazione finora
- 16.02.2018 - IRDAI Rectt NotificationDocumento7 pagine16.02.2018 - IRDAI Rectt NotificationNimisha ChouhanNessuna valutazione finora
- Ad 1Documento35 pagineAd 1TopRankersNessuna valutazione finora
- TANTRANSCO Official NotificationDocumento16 pagineTANTRANSCO Official NotificationAalen IssacNessuna valutazione finora
- SSC JE Answer Key Official NotificationDocumento1 paginaSSC JE Answer Key Official NotificationAalen IssacNessuna valutazione finora
- SVC CSR Official NotificationDocumento9 pagineSVC CSR Official NotificationAalen IssacNessuna valutazione finora
- APPSC Calender Year Final-2017Documento3 pagineAPPSC Calender Year Final-2017Krishna MurthyNessuna valutazione finora
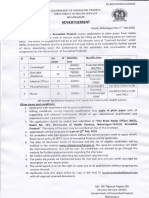
- NRHM Recruitment Official Notification - TestbookDocumento1 paginaNRHM Recruitment Official Notification - TestbookAalen IssacNessuna valutazione finora
- RHC Exam 64 2018 PDFDocumento9 pagineRHC Exam 64 2018 PDFTopRankersNessuna valutazione finora
- Official Notification For Army Medical Corps Recruitment 2017Documento6 pagineOfficial Notification For Army Medical Corps Recruitment 2017Shrishanti KaleNessuna valutazione finora
- Notification Indian Bank Clerk Officer PostsDocumento6 pagineNotification Indian Bank Clerk Officer PostsBraja kumbharNessuna valutazione finora
- Indian Oil Corporation Recruitment - TestbookDocumento7 pagineIndian Oil Corporation Recruitment - TestbookAalen IssacNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (120)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Fourier Transform Cheat SheetDocumento5 pagineFourier Transform Cheat Sheetalbert60467% (3)
- B. Tech. Course Structure & Syllabus, Electrical Engineering Department, N.I.T. SilcharDocumento55 pagineB. Tech. Course Structure & Syllabus, Electrical Engineering Department, N.I.T. SilcharKunalNessuna valutazione finora
- Ss 2Documento10 pagineSs 2Aditya PatilNessuna valutazione finora
- QB A4 DSPDocumento27 pagineQB A4 DSPDevie MohanNessuna valutazione finora
- SEM 6 SyllabusDocumento30 pagineSEM 6 SyllabusSaravanasundar NadarNessuna valutazione finora
- Convolution NotesDocumento6 pagineConvolution NotesMaMa BalochNessuna valutazione finora
- Convolution and Sampling TheoremDocumento44 pagineConvolution and Sampling TheoremPaul Imang100% (1)
- Real-Time DSP Implementation of Audio Crosstalk Cancellation Using Mixed Uniform Partitioned ConvolutionDocumento10 pagineReal-Time DSP Implementation of Audio Crosstalk Cancellation Using Mixed Uniform Partitioned ConvolutionAI Coordinator - CSC JournalsNessuna valutazione finora
- Signals and Systems With (MATLAB) Computing and Simulink Modeling - Karris - 5th EditionDocumento68 pagineSignals and Systems With (MATLAB) Computing and Simulink Modeling - Karris - 5th EditionJuan Pablo Cadena Aguilar100% (1)
- Sensors: Underwater Acoustic Target Recognition Based On Depthwise Separable Convolution Neural NetworksDocumento20 pagineSensors: Underwater Acoustic Target Recognition Based On Depthwise Separable Convolution Neural Networksp177508 Mansoor AliNessuna valutazione finora
- Convolution: 8.1. Linear Translation Invariant (LTI or LSI) OperatorsDocumento9 pagineConvolution: 8.1. Linear Translation Invariant (LTI or LSI) OperatorsAnonymous OOeTGKMAdDNessuna valutazione finora
- Chap 6 SolutionsDocumento34 pagineChap 6 Solutionsanonyme3897Nessuna valutazione finora
- Apendice GeodynamicsDocumento232 pagineApendice GeodynamicsDiego Castillo Jaramillo100% (1)
- Fundamental Course: Fourier Optics: Lecture NotesDocumento42 pagineFundamental Course: Fourier Optics: Lecture NotesJorge GuerreroNessuna valutazione finora
- ADSP Lectures CoditoDocumento107 pagineADSP Lectures CoditoArun Balajee VasudevanNessuna valutazione finora
- MATH283 Advanced Engineering Mathematics: DR Michelle DunbarDocumento45 pagineMATH283 Advanced Engineering Mathematics: DR Michelle DunbarspakfillaNessuna valutazione finora
- Digital Image Processing, 4th Editio: Chapter 1 IntroductionDocumento13 pagineDigital Image Processing, 4th Editio: Chapter 1 Introductionfreeloadtailieu2017Nessuna valutazione finora
- M SC - Mathematics-10 PDFDocumento18 pagineM SC - Mathematics-10 PDFNeha WateNessuna valutazione finora
- Gasquet Wi TomskiDocumento434 pagineGasquet Wi Tomskiemerson2112100% (1)
- (E. R. Kanasewich) Time Sequence Analysis in GeophDocumento494 pagine(E. R. Kanasewich) Time Sequence Analysis in Geophmikael karistof kolong100% (2)
- NotesDocumento72 pagineNotesReza ArraffiNessuna valutazione finora
- A Method of Insulator Fault DetectionDocumento22 pagineA Method of Insulator Fault Detectionpapuq solehNessuna valutazione finora
- Cs2403 Digital Signal Processing Anna University Imporant Questions Two Marks and 16 Marks Question BankDocumento8 pagineCs2403 Digital Signal Processing Anna University Imporant Questions Two Marks and 16 Marks Question BankSai KrishnanNessuna valutazione finora
- 5990 5266en PDFDocumento10 pagine5990 5266en PDFJames MossNessuna valutazione finora
- Convolutions of Complex Exponential FunctionsDocumento6 pagineConvolutions of Complex Exponential FunctionschandanaNessuna valutazione finora
- Digital Signal Processing Lab ManualDocumento171 pagineDigital Signal Processing Lab ManualRaj Kumar ChowdaryNessuna valutazione finora
- Uri Shmueli - International Tables For Crystallography, Vol.b - Reciprocal Space (2001, Springer)Documento610 pagineUri Shmueli - International Tables For Crystallography, Vol.b - Reciprocal Space (2001, Springer)Cecilia Roldán100% (1)
- WWW - Vidyarthiplus.in: Department of Ece, Adhiparasakthi College of Engineering, KalavaiDocumento18 pagineWWW - Vidyarthiplus.in: Department of Ece, Adhiparasakthi College of Engineering, Kalavaisharanyameen2704Nessuna valutazione finora
- Course Name: Digital Signal Processing Course Code: EE 605A Credit: 3Documento6 pagineCourse Name: Digital Signal Processing Course Code: EE 605A Credit: 3nspNessuna valutazione finora
- DSP Lectures v2 (Chapter2)Documento32 pagineDSP Lectures v2 (Chapter2)vvvssssvvv100% (1)