Potrebbero piacerti anche
- Discrete Metric SpaceDocumento3 pagineDiscrete Metric SpaceMiliyon TilahunNessuna valutazione finora
- Lecture Notes: Metric Spaces - Sergey MozgovoyDocumento41 pagineLecture Notes: Metric Spaces - Sergey MozgovoyNúñezNessuna valutazione finora
- Fulltext 008Documento15 pagineFulltext 008মেঘে ঢাকা তারাNessuna valutazione finora
- Metric SpacesDocumento21 pagineMetric SpacesaaronbjarkeNessuna valutazione finora
- 3210 CourseDocumento57 pagine3210 CourseHayat ullahNessuna valutazione finora
- Metric Space NotesDocumento70 pagineMetric Space NotesNehal AnuragNessuna valutazione finora
- MTS 361 - Metric SpaceDocumento21 pagineMTS 361 - Metric SpaceEmmanuel AyomikunNessuna valutazione finora
- Chap1 1Documento10 pagineChap1 1Jane NdindaNessuna valutazione finora
- Assignment 3Documento2 pagineAssignment 3James AttenboroughNessuna valutazione finora
- Metric and Topological Spaces Notas Aulas KrisDocumento146 pagineMetric and Topological Spaces Notas Aulas KrisRaimundo CostaNessuna valutazione finora
- Manonmaniam Sundaranar University: B.Sc. Mathematics - Iii YearDocumento175 pagineManonmaniam Sundaranar University: B.Sc. Mathematics - Iii YearRAKESH KUMARNessuna valutazione finora
- 2 Espacios Metricos PDFDocumento16 pagine2 Espacios Metricos PDFPercomp CpNessuna valutazione finora
- Advanced Mathematical Analysis: DraftDocumento8 pagineAdvanced Mathematical Analysis: DraftParthasarathi MondalNessuna valutazione finora
- Analele S Tiint Ifice Ale Universit AT Ii "Al.I.Cuza" Ias I Tomul XLVI, S.I A, Matematic A, 2000, f.1Documento22 pagineAnalele S Tiint Ifice Ale Universit AT Ii "Al.I.Cuza" Ias I Tomul XLVI, S.I A, Matematic A, 2000, f.1Safoora ElienNessuna valutazione finora
- Notes On Point Set Topology, Fall 2010: Stephan Stolz September 3, 2010Documento11 pagineNotes On Point Set Topology, Fall 2010: Stephan Stolz September 3, 2010tbrackman99Nessuna valutazione finora
- Topology Short Noticesn4eee44Documento31 pagineTopology Short Noticesn4eee44faisal chathaNessuna valutazione finora
- Chapter 2. Normed Linear Spaces: The BasicsDocumento2 pagineChapter 2. Normed Linear Spaces: The BasicsMuhammad ShoaibNessuna valutazione finora
- Topology Short NoticesDocumento12 pagineTopology Short Noticesfaisal chathaNessuna valutazione finora
- Choudhary) - Metric SpacesDocumento28 pagineChoudhary) - Metric SpacesKhmer ChamNessuna valutazione finora
- Differential GeometryDocumento125 pagineDifferential Geometrynimbigli7943100% (1)
- Metric SpacesDocumento42 pagineMetric SpacesAmol MittalNessuna valutazione finora
- Homework 1 Graduate Real AnalysisDocumento4 pagineHomework 1 Graduate Real AnalysislordpersonNessuna valutazione finora
- Problems Metric SpacesDocumento15 pagineProblems Metric Spacesmarina_bobesiNessuna valutazione finora
- DocumentDocumento3 pagineDocumentmtheoroNessuna valutazione finora
- Prof MT Nair NotesDocumento9 pagineProf MT Nair NotesChaitanya ShankarNessuna valutazione finora
- 12 MetricDocumento10 pagine12 MetricDanish ChNessuna valutazione finora
- Introduction To Real Analysis Fall 2014 Lecture Notes: Vern I. Paulsen November 6, 2014Documento81 pagineIntroduction To Real Analysis Fall 2014 Lecture Notes: Vern I. Paulsen November 6, 2014Ask Bulls BearNessuna valutazione finora
- Metric SpaceDocumento1 paginaMetric SpaceTanakka MorrchiNessuna valutazione finora
- Examples 1Documento2 pagineExamples 1SonozixNessuna valutazione finora
- 2008 JJC Paper 1 PDFDocumento3 pagine2008 JJC Paper 1 PDFkarpeoNessuna valutazione finora
- Wing Hong Tony Wong: ND THDocumento7 pagineWing Hong Tony Wong: ND THPeterNessuna valutazione finora
- Tutorial 1Documento2 pagineTutorial 1Michael CorleoneNessuna valutazione finora
- Metric Spaces: 1.1 Definition and ExamplesDocumento103 pagineMetric Spaces: 1.1 Definition and ExamplesNguyễn Quang HuyNessuna valutazione finora
- Definitions and ExamplesDocumento10 pagineDefinitions and ExamplesPiNessuna valutazione finora
- Problems and Solutions in Differential Geometry and ApplicationsDocumento125 pagineProblems and Solutions in Differential Geometry and ApplicationsseimomNessuna valutazione finora
- MA222 Metric Spaces Revision Guide: Written by Gareth SpeightDocumento16 pagineMA222 Metric Spaces Revision Guide: Written by Gareth SpeightRebecca RumseyNessuna valutazione finora
- Metric Space and Norm Linear Space Important QuestionsDocumento3 pagineMetric Space and Norm Linear Space Important QuestionsP GOSWAMINessuna valutazione finora
- Metrics PDFDocumento42 pagineMetrics PDFKshitijPatilNessuna valutazione finora
- Lecture 2 Calculus of Multi Variables 2011Documento22 pagineLecture 2 Calculus of Multi Variables 2011Yiauw ShenqNessuna valutazione finora
- Taller Sobre Espacios MetricosDocumento2 pagineTaller Sobre Espacios MetricosCésar RincónNessuna valutazione finora
- Metric Space: X X y yDocumento20 pagineMetric Space: X X y yWazha MmerekiNessuna valutazione finora
- Vector and Matrix NormDocumento17 pagineVector and Matrix NormpaivensolidsnakeNessuna valutazione finora
- 07 Chapter1Documento58 pagine07 Chapter1Mehwish QadirNessuna valutazione finora
- Math100, 3-Dimensional Space Vectors: 1.1 Rectangular CoordinatesDocumento8 pagineMath100, 3-Dimensional Space Vectors: 1.1 Rectangular CoordinatesHo Ka LunNessuna valutazione finora
- 9 Multivariable FunctionsDocumento5 pagine9 Multivariable FunctionsslowjamsNessuna valutazione finora
- Determinants (CTD) : Cramer's Rule (Section 2.3)Documento9 pagineDeterminants (CTD) : Cramer's Rule (Section 2.3)asahNessuna valutazione finora
- FA Chap1 1-4Documento4 pagineFA Chap1 1-4ThangNessuna valutazione finora
- MATH1.3 CALCULUS II - AY2020/21: Chapter 1: Functions of Several VariablesDocumento123 pagineMATH1.3 CALCULUS II - AY2020/21: Chapter 1: Functions of Several VariablesLong NguyễnNessuna valutazione finora
- Rectangular B Metric SpaceDocumento12 pagineRectangular B Metric SpaceDr. Pankaj MishraNessuna valutazione finora
- Partial Differential Equations PDFDocumento126 paginePartial Differential Equations PDFManoj Bisht100% (1)
- Department of Mathematics, IIT Kharagpur MA10002: Mathematics-II Assignment-2 On Integral CalculusDocumento1 paginaDepartment of Mathematics, IIT Kharagpur MA10002: Mathematics-II Assignment-2 On Integral CalculusSidMadharchodNessuna valutazione finora
- Prof. Michael Murray - Some Differential Geometry ExercisesDocumento4 pagineProf. Michael Murray - Some Differential Geometry ExercisesAnonymous 9rJe2lOskxNessuna valutazione finora
- Fa NotesDocumento85 pagineFa NotesAngelo OppioNessuna valutazione finora
- MTS423 - Functional AnalysisDocumento20 pagineMTS423 - Functional AnalysisEmmanuel AyomikunNessuna valutazione finora
- Assignment 4Documento2 pagineAssignment 4James AttenboroughNessuna valutazione finora
- Math 2163, Practice Exam IIIDocumento2 pagineMath 2163, Practice Exam IIIhthaier4062Nessuna valutazione finora
- Every Graph Is A Self-Similar Set: Todo Grafo Es Un Conjunto AutosimilarDocumento6 pagineEvery Graph Is A Self-Similar Set: Todo Grafo Es Un Conjunto AutosimilarRICARDO LUCIO MAMANI SUCANessuna valutazione finora
- Nonlinear Functional Analysis and Applications: Proceedings of an Advanced Seminar Conducted by the Mathematics Research Center, the University of Wisconsin, Madison, October 12-14, 1970Da EverandNonlinear Functional Analysis and Applications: Proceedings of an Advanced Seminar Conducted by the Mathematics Research Center, the University of Wisconsin, Madison, October 12-14, 1970Louis B. RallNessuna valutazione finora
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Da EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Nessuna valutazione finora
- Technical Analysis EnglishDocumento30 pagineTechnical Analysis EnglishRAJESH KUMARNessuna valutazione finora
- X CBSE 2016 Science SolutionDocumento6 pagineX CBSE 2016 Science SolutionRAJESH KUMARNessuna valutazione finora
- Mathematics Gate 2019 SyllabusDocumento2 pagineMathematics Gate 2019 Syllabusap021Nessuna valutazione finora
- Rajasthan Public Service Commission, AjmerDocumento3 pagineRajasthan Public Service Commission, AjmerRAJESH KUMARNessuna valutazione finora
- Counterexamples in AnalysisDocumento7 pagineCounterexamples in AnalysisRAJESH KUMARNessuna valutazione finora
- AssignDocumento1 paginaAssignRAJESH KUMARNessuna valutazione finora
- MATH 141 Exam Ii Sample ADocumento3 pagineMATH 141 Exam Ii Sample ARAJESH KUMARNessuna valutazione finora
- MATH 141 Final, Version A SUMMER 2012Documento6 pagineMATH 141 Final, Version A SUMMER 2012RAJESH KUMARNessuna valutazione finora
- MATH 141, 141H Final Exam, Sample D: 2 2 3 2 0 Sin (X)Documento4 pagineMATH 141, 141H Final Exam, Sample D: 2 2 3 2 0 Sin (X)RAJESH KUMARNessuna valutazione finora
- MATH 141 Final Exam Sample CDocumento5 pagineMATH 141 Final Exam Sample CRAJESH KUMARNessuna valutazione finora
- Credit Will Not Be Given For An Answer Unsupported by WorkDocumento8 pagineCredit Will Not Be Given For An Answer Unsupported by WorkRAJESH KUMARNessuna valutazione finora
- MATH 141 Exam Ii Sample CDocumento3 pagineMATH 141 Exam Ii Sample CRAJESH KUMARNessuna valutazione finora
- MATH 141 Exam I, Version A FALL 2011Documento5 pagineMATH 141 Exam I, Version A FALL 2011RAJESH KUMARNessuna valutazione finora
- MSC Ent RSLTDocumento100 pagineMSC Ent RSLTRAJESH KUMARNessuna valutazione finora
- Sample Exam.: Math 251H First Midterm ExamDocumento8 pagineSample Exam.: Math 251H First Midterm ExamRAJESH KUMARNessuna valutazione finora
- M250ex1 (Su14)Documento10 pagineM250ex1 (Su14)RAJESH KUMARNessuna valutazione finora
- TransformationsDocumento1 paginaTransformationsapi-543816025Nessuna valutazione finora
- (Specialist) 2008 VCAA Exam 2 Itute Solutions PDFDocumento4 pagine(Specialist) 2008 VCAA Exam 2 Itute Solutions PDFKelleyNessuna valutazione finora
- (The American Mathematical Monthly) John Horvath - An Introduction To Distributions. 77-Mathematical Association of America (1970)Documento15 pagine(The American Mathematical Monthly) John Horvath - An Introduction To Distributions. 77-Mathematical Association of America (1970)Jonathan De La CruzNessuna valutazione finora
- Ikrimatul KhotimahDocumento7 pagineIkrimatul KhotimahArinyNewbieNessuna valutazione finora
- CycloidDocumento3 pagineCycloidJeff HardyNessuna valutazione finora
- First of All Draw The Space Diagram, To Some Suitable Scale As Shown in Fig. (A)Documento28 pagineFirst of All Draw The Space Diagram, To Some Suitable Scale As Shown in Fig. (A)Surjit Kumar GandhiNessuna valutazione finora
- ch05 HallidayDocumento22 paginech05 Halliday043 Yosi Oxanna DebatarajaNessuna valutazione finora
- Paraline DrawingsDocumento3 pagineParaline DrawingsviditghaiNessuna valutazione finora
- Solidworks Simulation - Theoretical Manual PDFDocumento115 pagineSolidworks Simulation - Theoretical Manual PDFUsama AbudawudNessuna valutazione finora
- 2013 - 2014 (1B)Documento5 pagine2013 - 2014 (1B)Syed SalmanNessuna valutazione finora
- ZOD Presentation PDFDocumento33 pagineZOD Presentation PDFFelipe Carvajal RodríguezNessuna valutazione finora
- HSC 11 Projectile Motion Ch3Documento5 pagineHSC 11 Projectile Motion Ch3Snehal PanchalNessuna valutazione finora
- CP1a Vectors and Scalars: Word SheetDocumento2 pagineCP1a Vectors and Scalars: Word SheetKenneth KnightNessuna valutazione finora
- 5.1 GMC110 The Nature of Geographic DataDocumento28 pagine5.1 GMC110 The Nature of Geographic Datatakudzwa magundaNessuna valutazione finora
- Applications of Duality Theory (Diewert)Documento9 pagineApplications of Duality Theory (Diewert)Franco BailonNessuna valutazione finora
- U4 23 04Documento17 pagineU4 23 04lbo33Nessuna valutazione finora
- Projection of Planes Question Bank and SolutionsDocumento6 pagineProjection of Planes Question Bank and SolutionsJay S Ja'Na33% (3)
- Class IX SA-I & II Physics IITFoundation, NTSE & Olympiad Study Package Session (PDFDrive)Documento125 pagineClass IX SA-I & II Physics IITFoundation, NTSE & Olympiad Study Package Session (PDFDrive)विश्वजीत कुमार सिंहNessuna valutazione finora
- CHRISTIAN REED - Years of Crisis, Lesson 1 Guided Reading WorkbookDocumento3 pagineCHRISTIAN REED - Years of Crisis, Lesson 1 Guided Reading Workbookchristian.reedNessuna valutazione finora
- Architecture: Visual StudiesDocumento22 pagineArchitecture: Visual StudiesMustafaNessuna valutazione finora
- I.G.C.S.E. Volume & Surface Area Index:: Please Click On The Question Number You WantDocumento17 pagineI.G.C.S.E. Volume & Surface Area Index:: Please Click On The Question Number You WantLeena BhaiNessuna valutazione finora
- Mathematics QuestionsDocumento5 pagineMathematics QuestionsSanjay AdakNessuna valutazione finora
- Civ E398 Mid 2 Fall 14Documento10 pagineCiv E398 Mid 2 Fall 14Rajat GuptaNessuna valutazione finora
- AVITATION Level 5Documento11 pagineAVITATION Level 5Rahul guptaNessuna valutazione finora
- Graphs and Transformations 4B: 1 A y (X + 1) (X + 2) (X + 3) (X + 4) C y X (X + 1)Documento4 pagineGraphs and Transformations 4B: 1 A y (X + 1) (X + 2) (X + 3) (X + 4) C y X (X + 1)AnnaNessuna valutazione finora
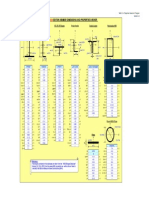
- AISC 14.1 Properties ViewerDocumento2 pagineAISC 14.1 Properties ViewerJay GalvanNessuna valutazione finora
- Guideline ProcedureDocumento9 pagineGuideline Procedurehenok bogaleNessuna valutazione finora
- Ques. Vector - (PART 1)Documento13 pagineQues. Vector - (PART 1)Sourabh kumarNessuna valutazione finora
- Field Work No. 3 Laying of A Simple Curve On Uneven Ground Using TheodoliteDocumento5 pagineField Work No. 3 Laying of A Simple Curve On Uneven Ground Using TheodoliteEliminated ProNessuna valutazione finora
- 1.1.4 Linear MotionDocumento9 pagine1.1.4 Linear MotionMohammad Jahangir AlamNessuna valutazione finora