Potrebbero piacerti anche
- ElectricityRetailWheelingHandbookSecondEditionByJohnM StudebakerDocumento301 pagineElectricityRetailWheelingHandbookSecondEditionByJohnM StudebakersbuesoNessuna valutazione finora
- Books in The Ieee Press Series On Power EngineeringDocumento490 pagineBooks in The Ieee Press Series On Power EngineeringFranklin CutocaNessuna valutazione finora
- Circuit Analysis forCIDocumento171 pagineCircuit Analysis forCIsbuesoNessuna valutazione finora
- HandsOnElectronicsAPracticalIntroductiontoAnalogandDigitalCircuitsByDanielMKaplanandChristopherGWhite 1Documento228 pagineHandsOnElectronicsAPracticalIntroductiontoAnalogandDigitalCircuitsByDanielMKaplanandChristopherGWhite 1sbuesoNessuna valutazione finora
- Transmission Lines: OlutionDocumento15 pagineTransmission Lines: Olutionbansalr100% (1)
- 38407-Dictionary of Electrical Engineering - English, German, French, Dutch, Russian 1985Documento480 pagine38407-Dictionary of Electrical Engineering - English, German, French, Dutch, Russian 1985scribgerov100% (3)
- Austin Hughes and Bill Drury (Auth.) Electric Motors and Drives. Fundamentals, Types and Applications 2013Documento123 pagineAustin Hughes and Bill Drury (Auth.) Electric Motors and Drives. Fundamentals, Types and Applications 2013megamaster2010Nessuna valutazione finora
- Animation Software For The Teaching of Electrical Transmission LinesDocumento12 pagineAnimation Software For The Teaching of Electrical Transmission LinessbuesoNessuna valutazione finora
- EE306 Electrical Engineering Technologies Lecture NotesDocumento462 pagineEE306 Electrical Engineering Technologies Lecture NotesLinh TranNessuna valutazione finora
- HandsOnElectronicsAPracticalIntroductiontoAnalogandDigitalCircuitsByDanielMKaplanandChristopherGWhite 1Documento228 pagineHandsOnElectronicsAPracticalIntroductiontoAnalogandDigitalCircuitsByDanielMKaplanandChristopherGWhite 1sbuesoNessuna valutazione finora
- Austin Hughes and Bill Drury (Auth.) Electric Motors and Drives. Fundamentals, Types and Applications 2013Documento123 pagineAustin Hughes and Bill Drury (Auth.) Electric Motors and Drives. Fundamentals, Types and Applications 2013megamaster2010Nessuna valutazione finora
- Austin Hughes and Bill Drury (Auth.) Electric Motors and Drives. Fundamentals, Types and Applications 2013Documento123 pagineAustin Hughes and Bill Drury (Auth.) Electric Motors and Drives. Fundamentals, Types and Applications 2013megamaster2010Nessuna valutazione finora
- Vol 1 Non-Contact Temperature MeasurementDocumento86 pagineVol 1 Non-Contact Temperature MeasurementrlucretiuNessuna valutazione finora
- Vol 1 Non-Contact Temperature MeasurementDocumento86 pagineVol 1 Non-Contact Temperature MeasurementrlucretiuNessuna valutazione finora
- Líneas de TransmisiónDocumento124 pagineLíneas de TransmisiónsbuesoNessuna valutazione finora
- Circuitos RealimentadosDocumento292 pagineCircuitos RealimentadossbuesoNessuna valutazione finora
- The Attenuation and Distortion of Travelling WavesDocumento12 pagineThe Attenuation and Distortion of Travelling WavessbuesoNessuna valutazione finora
- Travelling Waves MethodsDocumento2 pagineTravelling Waves MethodssbuesoNessuna valutazione finora
- Two Port Characterizations of Electronic CircuitsDocumento26 pagineTwo Port Characterizations of Electronic Circuitsbertan dağıstanlıNessuna valutazione finora
- 11 Lecture PDFDocumento14 pagine11 Lecture PDFsbuesoNessuna valutazione finora
- Analysis and Hybrid Computer Simulation of Multiconductor Transmission SystemsDocumento9 pagineAnalysis and Hybrid Computer Simulation of Multiconductor Transmission SystemssbuesoNessuna valutazione finora
- PICmicro MCU C - An Introduction To Programming The Microchip PIC in CCS CDocumento135 paginePICmicro MCU C - An Introduction To Programming The Microchip PIC in CCS Cvaibhav6820100% (34)
- Mplab XDocumento169 pagineMplab XNandoNessuna valutazione finora
- EE306 Electrical Engineering Technologies Lecture NotesDocumento462 pagineEE306 Electrical Engineering Technologies Lecture NotesLinh TranNessuna valutazione finora
- ABB - Electrical Installation Handbook - IIDocumento137 pagineABB - Electrical Installation Handbook - IIBahador Saghatchian89% (9)
- L7-Active Filters PDFDocumento42 pagineL7-Active Filters PDFdes1982100% (1)
- A Novel Transmission-Line Voltage Measuring MethodDocumento6 pagineA Novel Transmission-Line Voltage Measuring MethodsbuesoNessuna valutazione finora
- Technique For Reducing Transient VoltagesDocumento7 pagineTechnique For Reducing Transient VoltagessbuesoNessuna valutazione finora
- AM-500 Digital MultimeterDocumento2 pagineAM-500 Digital MultimetersbuesoNessuna valutazione finora
- Traveling Waves Due To LightningDocumento15 pagineTraveling Waves Due To LightningsbuesoNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Extensive Reading Involves Learners Reading Texts For Enjoyment and To Develop General Reading SkillsDocumento18 pagineExtensive Reading Involves Learners Reading Texts For Enjoyment and To Develop General Reading SkillsG Andrilyn AlcantaraNessuna valutazione finora
- Emerson Park Master Plan 2015 DraftDocumento93 pagineEmerson Park Master Plan 2015 DraftRyan DeffenbaughNessuna valutazione finora
- Newcomers Guide To The Canadian Job MarketDocumento47 pagineNewcomers Guide To The Canadian Job MarketSS NairNessuna valutazione finora
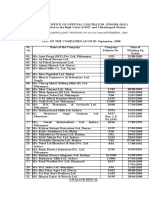
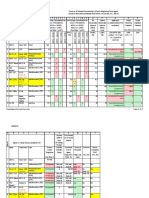
- Statement of Compulsory Winding Up As On 30 SEPTEMBER, 2008Documento4 pagineStatement of Compulsory Winding Up As On 30 SEPTEMBER, 2008abchavhan20Nessuna valutazione finora
- Microsoft Word 2000 IntroductionDocumento72 pagineMicrosoft Word 2000 IntroductionYsmech SalazarNessuna valutazione finora
- Product CycleDocumento2 pagineProduct CycleoldinaNessuna valutazione finora
- AAU5243 DescriptionDocumento30 pagineAAU5243 DescriptionWisut MorthaiNessuna valutazione finora
- Clogging in Permeable (A Review)Documento13 pagineClogging in Permeable (A Review)Chong Ting ShengNessuna valutazione finora
- Distinguish Between Tax and FeeDocumento2 pagineDistinguish Between Tax and FeeRishi Agarwal100% (1)
- MMW FinalsDocumento4 pagineMMW FinalsAsh LiwanagNessuna valutazione finora
- FALL PROTECTION ON SCISSOR LIFTS PDF 2 PDFDocumento3 pagineFALL PROTECTION ON SCISSOR LIFTS PDF 2 PDFJISHNU TKNessuna valutazione finora
- Clean Agent ComparisonDocumento9 pagineClean Agent ComparisonJohn ANessuna valutazione finora
- Investigatory Project Pesticide From RadishDocumento4 pagineInvestigatory Project Pesticide From Radishmax314100% (1)
- Suband Coding in MatlabDocumento5 pagineSuband Coding in MatlabZoro Roronoa0% (1)
- Failure Analysis Case Study PDFDocumento2 pagineFailure Analysis Case Study PDFScott50% (2)
- FBCA Biomarkers and ConditionsDocumento8 pagineFBCA Biomarkers and Conditionsmet50% (2)
- Irctc Tour May 2023Documento6 pagineIrctc Tour May 2023Mysa ChakrapaniNessuna valutazione finora
- EE290 Practice 3Documento4 pagineEE290 Practice 3olgaNessuna valutazione finora
- Sekolah Menengah Kebangsaan Ss17 JALAN SS17/1, Subang Jaya English Scheme of Work Form 3Documento11 pagineSekolah Menengah Kebangsaan Ss17 JALAN SS17/1, Subang Jaya English Scheme of Work Form 3Rohana YahyaNessuna valutazione finora
- Reservoir Rock TypingDocumento56 pagineReservoir Rock TypingAffan HasanNessuna valutazione finora
- Basic Five Creative ArtsDocumento4 pagineBasic Five Creative Artsprincedonkor177Nessuna valutazione finora
- Impact of Bap and Iaa in Various Media Concentrations and Growth Analysis of Eucalyptus CamaldulensisDocumento5 pagineImpact of Bap and Iaa in Various Media Concentrations and Growth Analysis of Eucalyptus CamaldulensisInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Overview of Quality Gurus Deming, Juran, Crosby, Imai, Feigenbaum & Their ContributionsDocumento11 pagineOverview of Quality Gurus Deming, Juran, Crosby, Imai, Feigenbaum & Their ContributionsVenkatesh RadhakrishnanNessuna valutazione finora
- Weekly Choice - Section B - February 16, 2012Documento10 pagineWeekly Choice - Section B - February 16, 2012Baragrey DaveNessuna valutazione finora
- AVANTIZ 2021 LNR125 (B927) EngineDocumento16 pagineAVANTIZ 2021 LNR125 (B927) EngineNg Chor TeckNessuna valutazione finora
- B. Ing Kls 6Documento5 pagineB. Ing Kls 6siskaNessuna valutazione finora
- 2.4 Avogadro's Hypothesis+ Equivalent MassesDocumento12 pagine2.4 Avogadro's Hypothesis+ Equivalent MassesSantosh MandalNessuna valutazione finora
- IntroductionDocumento34 pagineIntroductionmarranNessuna valutazione finora
- 10 Slides For A Perfect Startup Pitch DeckDocumento6 pagine10 Slides For A Perfect Startup Pitch DeckZakky AzhariNessuna valutazione finora
- Introduction To OpmDocumento30 pagineIntroduction To OpmNaeem Ul HassanNessuna valutazione finora