Potrebbero piacerti anche
- Synchronizer Techniques For Multi Clock Domain SoCsDocumento8 pagineSynchronizer Techniques For Multi Clock Domain SoCskrishna chaitanyaNessuna valutazione finora
- Jaspergold® Clock Domain Crossing App (CDC) : © 2018 Cadence Design Systems, Inc. All Rights ReservedDocumento12 pagineJaspergold® Clock Domain Crossing App (CDC) : © 2018 Cadence Design Systems, Inc. All Rights ReservedAnton LawrendraNessuna valutazione finora
- 8B10B CodingDocumento29 pagine8B10B CodingRamakrishnaRao SoogooriNessuna valutazione finora
- 2-3 SSUSB DevCon LinkLayer ViningDocumento54 pagine2-3 SSUSB DevCon LinkLayer ViningHardik TrivediNessuna valutazione finora
- Timing in Digital Circuits - NotesDocumento9 pagineTiming in Digital Circuits - NotesKowshick GuruNessuna valutazione finora
- Equations and Impacts of Setup and Hold TimeDocumento5 pagineEquations and Impacts of Setup and Hold TimeShravan Kumar AshannagariNessuna valutazione finora
- Interfacing and Some Common Building Blocks: Coe 111: Advanced Digital DesignDocumento35 pagineInterfacing and Some Common Building Blocks: Coe 111: Advanced Digital DesignFrancisNessuna valutazione finora
- SystemVerilog Vs Verilog in RTL DesignDocumento4 pagineSystemVerilog Vs Verilog in RTL DesignVijay KumarNessuna valutazione finora
- Choosing The Right Superlinting Technology For Early RTL Code SignoffDocumento5 pagineChoosing The Right Superlinting Technology For Early RTL Code Signoffujwala_512Nessuna valutazione finora
- Lec20 RTL DesignDocumento40 pagineLec20 RTL DesignVrushali patilNessuna valutazione finora
- VLSI Design - Verilog HDL IntroductionDocumento30 pagineVLSI Design - Verilog HDL Introductionanand_duraiswamyNessuna valutazione finora
- Synopsis Design Constraints: SDC Timing Constraints Clock ConstraintsDocumento2 pagineSynopsis Design Constraints: SDC Timing Constraints Clock ConstraintsHistPro WebNessuna valutazione finora
- Features of PCIe Phy LayerDocumento6 pagineFeatures of PCIe Phy Layerdipin555100% (1)
- Digital VLSI Design Lecture 3: Logic Synthesis: Semester A, 2018-19 Lecturer: Dr. Adam TemanDocumento47 pagineDigital VLSI Design Lecture 3: Logic Synthesis: Semester A, 2018-19 Lecturer: Dr. Adam TemansrajeceNessuna valutazione finora
- Spyglass-Cdc: Industry Most Comprehensive, Practical, and Powerful CDC SolutionDocumento2 pagineSpyglass-Cdc: Industry Most Comprehensive, Practical, and Powerful CDC SolutionRamakrishnaRao SoogooriNessuna valutazione finora
- RTL Logic Synthesis TutorialDocumento7 pagineRTL Logic Synthesis TutorialShama LolyNessuna valutazione finora
- Introduction To Formal Equivalence Verification (FEV) : Erik Seligman CS 510, Lecture 4, January 2009Documento50 pagineIntroduction To Formal Equivalence Verification (FEV) : Erik Seligman CS 510, Lecture 4, January 2009ddamitNessuna valutazione finora
- Team VLSI SDCDocumento11 pagineTeam VLSI SDCNaganithesh GhattamaneniNessuna valutazione finora
- Setup and Hold - PDF Version 1Documento15 pagineSetup and Hold - PDF Version 1naniNessuna valutazione finora
- Verif Plan CmptsDocumento35 pagineVerif Plan CmptsBach HoangNessuna valutazione finora
- System Verilog Overview-IbmDocumento56 pagineSystem Verilog Overview-IbmABHAYNessuna valutazione finora
- STA AssignmentsDocumento3 pagineSTA AssignmentsTejas DharaniNessuna valutazione finora
- Nvme Pcie SSD M.2 ManualDocumento56 pagineNvme Pcie SSD M.2 ManualDummy BearNessuna valutazione finora
- Clock GatingDocumento4 pagineClock GatingNaveen KumarNessuna valutazione finora
- Asynchronous FIFO designDocumento16 pagineAsynchronous FIFO designAyush Katyal100% (1)
- Clock GatingDocumento10 pagineClock Gatingpavanmk2501Nessuna valutazione finora
- Setup and Hold TimeDocumento6 pagineSetup and Hold TimeShobhit GargNessuna valutazione finora
- System On Chip Architecture Design Lecture21Documento17 pagineSystem On Chip Architecture Design Lecture21Thi NguyenNessuna valutazione finora
- Study and Analysis of RTL Verification Tool IEEE ConferenceDocumento7 pagineStudy and Analysis of RTL Verification Tool IEEE ConferenceZC LNessuna valutazione finora
- Advanced Verilog CodingDocumento76 pagineAdvanced Verilog Coding1234GAURAVNessuna valutazione finora
- Setup1 1210Documento32 pagineSetup1 1210Akhila PurushothamanNessuna valutazione finora
- Negative Setup and Hold TimeDocumento3 pagineNegative Setup and Hold TimeMasterbrain BrainNessuna valutazione finora
- Ahb-Lite To Apb Protocol: BY Shraddha Devaiya EC - 018 Anand Therattil EC - 092Documento29 pagineAhb-Lite To Apb Protocol: BY Shraddha Devaiya EC - 018 Anand Therattil EC - 092AnandNessuna valutazione finora
- OCVstinks MattWeber SLEDocumento21 pagineOCVstinks MattWeber SLEvlsi_asicNessuna valutazione finora
- DFF Setup Hold ReviewDocumento50 pagineDFF Setup Hold ReviewAkanksha221291Nessuna valutazione finora
- Block Diagram of Intel Atom ProcessorDocumento23 pagineBlock Diagram of Intel Atom Processorfestio94Nessuna valutazione finora
- How To Access The Rapid Adoption Kits?Documento11 pagineHow To Access The Rapid Adoption Kits?Kumar KumarNessuna valutazione finora
- Digital VLSI Design Timing Analysis: Semester A, 2018-19 Lecturer: Dr. Adam TemanDocumento72 pagineDigital VLSI Design Timing Analysis: Semester A, 2018-19 Lecturer: Dr. Adam TemanAsShabNessuna valutazione finora
- 1442 - Reusable and Scalable Verification Solutions For Designing AIML SoCsDocumento34 pagine1442 - Reusable and Scalable Verification Solutions For Designing AIML SoCsAnh Dung LeNessuna valutazione finora
- Getting Started Lab With Spyglass 450Documento47 pagineGetting Started Lab With Spyglass 450Никита Борсяков100% (1)
- Interview Question UsefullinkDocumento3 pagineInterview Question UsefullinkMOHAMMED JUNED RAHINessuna valutazione finora
- SynthesisDocumento10 pagineSynthesisgudala praveenNessuna valutazione finora
- Asic DDR PhyDocumento1 paginaAsic DDR PhylmlululuNessuna valutazione finora
- Types of Delays that Impact ASIC DesignDocumento17 pagineTypes of Delays that Impact ASIC DesignJayanth bemesettyNessuna valutazione finora
- 04 14 LTSSM Implementation at 5GTs and Beyond PDFDocumento18 pagine04 14 LTSSM Implementation at 5GTs and Beyond PDFHardik TrivediNessuna valutazione finora
- Clock Domain Crossing Techniques and SolutionsDocumento38 pagineClock Domain Crossing Techniques and SolutionsRamakrishnaRao SoogooriNessuna valutazione finora
- SoC Timing ECO CycleDocumento2 pagineSoC Timing ECO CycleStudent100% (1)
- Spyglass CDCDocumento2 pagineSpyglass CDCRahul SharmaNessuna valutazione finora
- An CDC False PathDocumento6 pagineAn CDC False PathMukeshPandaNessuna valutazione finora
- Async TWilliams 14may03Documento59 pagineAsync TWilliams 14may03bestkarunNessuna valutazione finora
- Top Down AsicDocumento17 pagineTop Down AsicKrishna M ViswanathNessuna valutazione finora
- Xge Mac SpecDocumento24 pagineXge Mac Spechackdrag100% (1)
- Timing Sign-Off With Pri Metime: Speaker: Bob Tsai Advisor: Jie-Hong Roland JiangDocumento14 pagineTiming Sign-Off With Pri Metime: Speaker: Bob Tsai Advisor: Jie-Hong Roland JiangNguyênNguyênNessuna valutazione finora
- Managing Functional Verification Projects: White PaperDocumento8 pagineManaging Functional Verification Projects: White PaperVenkata Kiran Kumar SathikelaNessuna valutazione finora
- FPGA Design TechniquesDocumento32 pagineFPGA Design TechniquesRavindra SainiNessuna valutazione finora
- What Are The Different Clocking Strategies Employed in VLSI System ? Discuss H-Tree' Clock Distribution in High Density CMOS Circuits ? AnsDocumento6 pagineWhat Are The Different Clocking Strategies Employed in VLSI System ? Discuss H-Tree' Clock Distribution in High Density CMOS Circuits ? AnsTozammel Hossain TusharNessuna valutazione finora
- ELECH409 Th05Documento57 pagineELECH409 Th05hung kungNessuna valutazione finora
- Digital Logic Circuits (Part 2) Digital Logic Circuits (Part 2)Documento25 pagineDigital Logic Circuits (Part 2) Digital Logic Circuits (Part 2)maddy13rocksNessuna valutazione finora
- Upgrade or downgrade your Atal Pension Yojana pension amountDocumento1 paginaUpgrade or downgrade your Atal Pension Yojana pension amountpawanzNessuna valutazione finora
- Shiva Kavacham TeluguDocumento6 pagineShiva Kavacham Teluguvinsha71Nessuna valutazione finora
- Simple RTL PipelineDocumento7 pagineSimple RTL PipelinepawanzNessuna valutazione finora
- Advanced Synthesis CookbookDocumento127 pagineAdvanced Synthesis CookbookZow NiakNessuna valutazione finora
- CPF User PDFDocumento203 pagineCPF User PDFpawanzNessuna valutazione finora
- Metastability and Synchronizers - Posted PDFDocumento14 pagineMetastability and Synchronizers - Posted PDFpawanzNessuna valutazione finora
- 14 Cach Dong Bo Du Lieu - Synchronous TechniquesDocumento8 pagine14 Cach Dong Bo Du Lieu - Synchronous TechniquesNguyễn Thế TuyênNessuna valutazione finora
- Sync AsyncDocumento31 pagineSync AsyncAnand ThibbaiahNessuna valutazione finora
- Modeling of Finite State Machines: Debdeep MukhopadhyayDocumento36 pagineModeling of Finite State Machines: Debdeep MukhopadhyaypawanzNessuna valutazione finora
- Decouping CapacitorDocumento4 pagineDecouping CapacitorpawanzNessuna valutazione finora
- LUT - (Look Up Table) : Field Programmable Gate ArraysDocumento3 pagineLUT - (Look Up Table) : Field Programmable Gate ArrayspawanzNessuna valutazione finora
- Atmel 8456 8 and 32 Bit AVR Microcontrollers AVR127 Understanding ADC Parameters Application NoteDocumento20 pagineAtmel 8456 8 and 32 Bit AVR Microcontrollers AVR127 Understanding ADC Parameters Application NoteSapna NarayananNessuna valutazione finora
- 18Documento10 pagine18pawanzNessuna valutazione finora
- FifoDocumento1 paginaFifopawanzNessuna valutazione finora
- Tutorial Simulation Modelsim 0Documento14 pagineTutorial Simulation Modelsim 0pawanzNessuna valutazione finora
- It ReturnsDocumento1 paginaIt ReturnspawanzNessuna valutazione finora
- Designing With PIN Diodes (AP5508-98)Documento17 pagineDesigning With PIN Diodes (AP5508-98)fahkingmoronNessuna valutazione finora
- Names of foodstuffs in Indian languagesDocumento19 pagineNames of foodstuffs in Indian languagesSubramanyam GundaNessuna valutazione finora
- Next Gen 28 NM OverviewDocumento10 pagineNext Gen 28 NM OverviewpawanzNessuna valutazione finora
- Anjaneya Dandakam Telugu LargeDocumento3 pagineAnjaneya Dandakam Telugu LargepawanzNessuna valutazione finora
- Systemverilog Made Easy: A Perl Interface To A Full Ieee 1800 Compliant ParserDocumento5 pagineSystemverilog Made Easy: A Perl Interface To A Full Ieee 1800 Compliant ParsersattarsekharNessuna valutazione finora
- BhartriharisubhashitaluDocumento80 pagineBhartriharisubhashitalupawanzNessuna valutazione finora
- 40-character title summarizing SystemVerilog numbers, constants, operators and modulesDocumento2 pagine40-character title summarizing SystemVerilog numbers, constants, operators and modulesRaymundo Saraiva100% (1)
- DECS-IInd Sem SyllabusDocumento17 pagineDECS-IInd Sem SyllabusDinesh KumarNessuna valutazione finora
- Shiva KavachamDocumento10 pagineShiva KavachampawanzNessuna valutazione finora
- Navagraha Stotram TeluguDocumento2 pagineNavagraha Stotram TelugumohankrishnavNessuna valutazione finora
- Ubuntu12 04-DefaultApplicationKeyboardShortcutsDocumento20 pagineUbuntu12 04-DefaultApplicationKeyboardShortcutspawanzNessuna valutazione finora
- Electronics Symbols Cheat SheetDocumento14 pagineElectronics Symbols Cheat Sheetpawanz100% (1)
- 4150 Electronics 4Documento3 pagine4150 Electronics 4pawanzNessuna valutazione finora
- Floor PlanningDocumento22 pagineFloor PlanningAnshumeek UpretiNessuna valutazione finora
- Analog Digital LabDocumento3 pagineAnalog Digital LabAdvanceElectronicesNessuna valutazione finora
- PCB Layout Recommendations For Bga PackagesDocumento81 paginePCB Layout Recommendations For Bga PackagesovmlcabreraNessuna valutazione finora
- Design and Implementation of Smart Traffic Light Controller Using VHDL LanguageDocumento7 pagineDesign and Implementation of Smart Traffic Light Controller Using VHDL LanguageSenthil MuruganNessuna valutazione finora
- MAX232x Dual EIA-232 Drivers/Receivers: 1 Features 3 DescriptionDocumento26 pagineMAX232x Dual EIA-232 Drivers/Receivers: 1 Features 3 DescriptionIlson JuniorNessuna valutazione finora
- Experiment 5: NAND and NOR Implementation: The NAND Gate Are Shown Below in FigureDocumento5 pagineExperiment 5: NAND and NOR Implementation: The NAND Gate Are Shown Below in FigureTayyabNessuna valutazione finora
- Chipfail PDFDocumento156 pagineChipfail PDFXingXingNessuna valutazione finora
- 8051 Interfacing External Memory DevicesDocumento31 pagine8051 Interfacing External Memory DevicesMehulJainNessuna valutazione finora
- Elec 578 - Integrated Circuit DesignDocumento4 pagineElec 578 - Integrated Circuit DesignVishnu 3333Nessuna valutazione finora
- 2013 Transputer ArchitectureDocumento61 pagine2013 Transputer ArchitecturerobbyyuNessuna valutazione finora
- Getting Started With Stm32f4Documento46 pagineGetting Started With Stm32f4nazim.agabekov9707Nessuna valutazione finora
- Qualcomm Interview ExperienceDocumento2 pagineQualcomm Interview Experienceksnmurthy0475Nessuna valutazione finora
- Bus and Memory Transfer+RTL+VonneumannDocumento38 pagineBus and Memory Transfer+RTL+Vonneumannsaumya2213215Nessuna valutazione finora
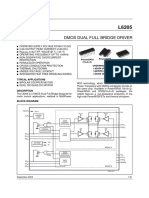
- l6205 Driver MotorDocumento21 paginel6205 Driver MotorLeon MartinezNessuna valutazione finora
- Static Timing Analysis 9100Documento32 pagineStatic Timing Analysis 9100Balaji VenkataramanNessuna valutazione finora
- Kiem Tra KTMT HN hk1 2019 2020Documento16 pagineKiem Tra KTMT HN hk1 2019 2020Tùng LêNessuna valutazione finora
- Chapter 5 - Slides - Part - IDocumento23 pagineChapter 5 - Slides - Part - IKarimovaRaikhanovnaNessuna valutazione finora
- Abes Engineering College, Ghaziabad: Department of Electronics & Communication EngineeringDocumento35 pagineAbes Engineering College, Ghaziabad: Department of Electronics & Communication EngineeringJayan GoelNessuna valutazione finora
- ECE213Documento1 paginaECE213Amal RasheedNessuna valutazione finora
- I I I I R/W: Input Buffer EDocumento4 pagineI I I I R/W: Input Buffer ERizwan SannyNessuna valutazione finora
- Sahil Kumar Analog Ca2Documento7 pagineSahil Kumar Analog Ca2Sahil KumarNessuna valutazione finora
- 2marks With AnswerDocumento46 pagine2marks With AnswerhariNessuna valutazione finora
- ترانزستور تأثير المجالDocumento23 pagineترانزستور تأثير المجالmemo alfaisalNessuna valutazione finora
- BCS302Documento2 pagineBCS302sagarblazaNessuna valutazione finora
- 40174Documento5 pagine40174Merényi OszkárNessuna valutazione finora
- SP20 VLSI Lecture01 20200204 Introduction To VLSI Design PDFDocumento25 pagineSP20 VLSI Lecture01 20200204 Introduction To VLSI Design PDFSohaib Qazi AyyazNessuna valutazione finora
- CAD Layout Design RulesDocumento21 pagineCAD Layout Design RulesShawanNessuna valutazione finora
- VLSI Design Exam QuestionsDocumento2 pagineVLSI Design Exam QuestionsDeepanshi RuhelaNessuna valutazione finora
- Von-Neumann vs Harvard ArchitecturesDocumento3 pagineVon-Neumann vs Harvard ArchitecturesRalstine Jane IgneNessuna valutazione finora