Potrebbero piacerti anche
- Chapter 6 - Time - Response - 2020 PDFDocumento88 pagineChapter 6 - Time - Response - 2020 PDFtiraNessuna valutazione finora
- Control System Analysis Poles of A Transfer FunctionDocumento4 pagineControl System Analysis Poles of A Transfer FunctionRyan Kim PatronNessuna valutazione finora
- Chapter 3 - Time Response AnalysisDocumento31 pagineChapter 3 - Time Response AnalysisANDREW LEONG CHUN TATT STUDENTNessuna valutazione finora
- Chapter 6 - Time ResponseDocumento88 pagineChapter 6 - Time Responsevenosyah devanNessuna valutazione finora
- Transfer Function On RLC CircuitsDocumento38 pagineTransfer Function On RLC CircuitsMarasigan Ryan50% (2)
- Control System Fundamental: Time Response AnalysisDocumento77 pagineControl System Fundamental: Time Response Analysisoneisa92100% (1)
- Mece306 ch04 2019 20Documento70 pagineMece306 ch04 2019 20Eren ÖzataNessuna valutazione finora
- Ec Formula Notes 11Documento369 pagineEc Formula Notes 11Tharun kondaNessuna valutazione finora
- Unidad 2 Parte 2Documento63 pagineUnidad 2 Parte 2Miguel CorreaNessuna valutazione finora
- Machine Control SystemsDocumento9 pagineMachine Control SystemsHisham SyedNessuna valutazione finora
- 1-Module3 - Time Domain AnalysisDocumento12 pagine1-Module3 - Time Domain AnalysisShashankaNessuna valutazione finora
- 4 Time ResponseDocumento31 pagine4 Time Responseheartblade32Nessuna valutazione finora
- G S D(S) N S D S N S D S: EC5: Control SystemsDocumento7 pagineG S D(S) N S D S N S D S: EC5: Control SystemsMANOJ KUMAR DASNessuna valutazione finora
- Time Respons: Dasar Sistem KontrolDocumento13 pagineTime Respons: Dasar Sistem KontrolitmyNessuna valutazione finora
- 6 - Time Response Analysis 2Documento21 pagine6 - Time Response Analysis 2حساب ويندوزNessuna valutazione finora
- Chapter 3: Dynamic ResponseDocumento41 pagineChapter 3: Dynamic ResponseAhmedSalahNessuna valutazione finora
- FME 326 - Module 4 - Time ResponseDocumento29 pagineFME 326 - Module 4 - Time ResponseJesse Jon FerolinoNessuna valutazione finora
- FME 326 - Module 4 - Time ResponseDocumento29 pagineFME 326 - Module 4 - Time ResponseJesse Jon FerolinoNessuna valutazione finora
- FME 326 - Module 4 - Time ResponseDocumento29 pagineFME 326 - Module 4 - Time ResponseJesse Jon FerolinoNessuna valutazione finora
- Transient and Steady-State Re-Sponse Analyses: Unit-Step Response of First-Order SystemsDocumento12 pagineTransient and Steady-State Re-Sponse Analyses: Unit-Step Response of First-Order SystemsAhmed SaidNessuna valutazione finora
- Time Domain Analysis of Control SystemsDocumento12 pagineTime Domain Analysis of Control Systemsأحمد تركي كحيوشNessuna valutazione finora
- Time Response (1st Order System)Documento21 pagineTime Response (1st Order System)Firdaus TreezaNessuna valutazione finora
- Time Domain Analysis of Control SystemDocumento25 pagineTime Domain Analysis of Control SystemEti'el Films / ኢትኤል ፊልሞችNessuna valutazione finora
- Problema B.5.1 OgataDocumento2 pagineProblema B.5.1 OgataOscar Mtz Fts50% (2)
- EEET2197 Tute2Documento2 pagineEEET2197 Tute2Collin lcwNessuna valutazione finora
- Time Respons: Dasar Sistem KontrolDocumento15 pagineTime Respons: Dasar Sistem KontrolitmyNessuna valutazione finora
- Lab # 6 Time Response AnalysisDocumento10 pagineLab # 6 Time Response AnalysisFahad AneebNessuna valutazione finora
- L5 To 7 Transient and Steady State ResponseDocumento53 pagineL5 To 7 Transient and Steady State ResponseRaj PatelNessuna valutazione finora
- 26 Control Engineering LAbDocumento50 pagine26 Control Engineering LAbEashan PendseNessuna valutazione finora
- Automatic Control 4th Year For Power and DesignDocumento74 pagineAutomatic Control 4th Year For Power and Designomarlotfy455Nessuna valutazione finora
- Control System Manual 1 To 5Documento23 pagineControl System Manual 1 To 5Eashan PendseNessuna valutazione finora
- CS Unit-2Documento52 pagineCS Unit-2auchthram143Nessuna valutazione finora
- Time ResponseDocumento14 pagineTime ResponseRilwanNessuna valutazione finora
- Chap No.3 Time Response and Stability AnalysisDocumento71 pagineChap No.3 Time Response and Stability AnalysissomefactaNessuna valutazione finora
- Ie Exp 5 Student ManualDocumento27 pagineIe Exp 5 Student ManualFred H HalderNessuna valutazione finora
- Lsim Simulates The (Time) Response of Continuous or Discrete Linear Systems To Arbitrary Inputs./ Pzmap Poles Zeros MapDocumento1 paginaLsim Simulates The (Time) Response of Continuous or Discrete Linear Systems To Arbitrary Inputs./ Pzmap Poles Zeros Maptooba mukhtarNessuna valutazione finora
- UntitledDocumento32 pagineUntitledMasudur RahmanNessuna valutazione finora
- ME5012 - Electronic Systems, Control and ComputingDocumento9 pagineME5012 - Electronic Systems, Control and ComputingMounir MikhaelNessuna valutazione finora
- CS Mod3@AzDOCUMENTS - inDocumento46 pagineCS Mod3@AzDOCUMENTS - insssNessuna valutazione finora
- LCS 1st Lab ManualDocumento14 pagineLCS 1st Lab ManualWaleed QureshiNessuna valutazione finora
- CH 2Documento23 pagineCH 2wehabekodaNessuna valutazione finora
- Mece306 ch02 2019 20Documento82 pagineMece306 ch02 2019 20Eren ÖzataNessuna valutazione finora
- Module 2 FullDocumento67 pagineModule 2 FullRakshith HsNessuna valutazione finora
- Laplace TransformDocumento11 pagineLaplace TransformDerrick Maatla MoadiNessuna valutazione finora
- Unit 2 - Control System - WWW - Rgpvnotes.inDocumento17 pagineUnit 2 - Control System - WWW - Rgpvnotes.invikram singhNessuna valutazione finora
- Department of Electromechanical Engineering Course Title: Control SystemDocumento25 pagineDepartment of Electromechanical Engineering Course Title: Control SystemYidersal MarewNessuna valutazione finora
- Lec#19-24 - Laplace DomainDocumento42 pagineLec#19-24 - Laplace DomainDaniya AbbasiNessuna valutazione finora
- Time Response AnalysisDocumento19 pagineTime Response AnalysisPandimadevi GanesanNessuna valutazione finora
- Best Int ControlDocumento77 pagineBest Int ControlhinsermuNessuna valutazione finora
- 1 Lab Manual-Final-Control-System-1Documento35 pagine1 Lab Manual-Final-Control-System-1Shimalis RetaNessuna valutazione finora
- Time Response Analysis HomeworkDocumento6 pagineTime Response Analysis HomeworkNotnowNessuna valutazione finora
- Hashemian Hashem M 201105 PHD DatatablesDocumento46 pagineHashemian Hashem M 201105 PHD DatatablesSebastián CandeiasNessuna valutazione finora
- Model Questions Class Test SolutionDocumento22 pagineModel Questions Class Test SolutionAnanthan SrijithNessuna valutazione finora
- Sheet 4 PDFDocumento53 pagineSheet 4 PDFxtito2Nessuna valutazione finora
- Chapter 3A SlidesDocumento26 pagineChapter 3A Slidesيوسف الأحمديNessuna valutazione finora
- Materi 5 RL2Documento93 pagineMateri 5 RL2Christian KevinNessuna valutazione finora
- Chapter 8: Introduction To Systems Control: 8.1 System Stability From Pole-Zero Locations (S-Domain)Documento47 pagineChapter 8: Introduction To Systems Control: 8.1 System Stability From Pole-Zero Locations (S-Domain)Sreedharachary SimhaaNessuna valutazione finora
- Unit 2 - Control Systems - WWW - Rgpvnotes.inDocumento16 pagineUnit 2 - Control Systems - WWW - Rgpvnotes.inpeacepalharshNessuna valutazione finora
- FOPDT Model CharacterizationDocumento6 pagineFOPDT Model CharacterizationHugo EGNessuna valutazione finora
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Da EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Nessuna valutazione finora
- PCI Express Test Spec Platform 3.0 06182013 TSDocumento383 paginePCI Express Test Spec Platform 3.0 06182013 TSDeng XinNessuna valutazione finora
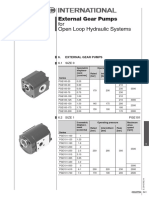
- External Gear Pumps For Open Loop Hydraulic SystemsDocumento2 pagineExternal Gear Pumps For Open Loop Hydraulic SystemsBlashko GjorgjievNessuna valutazione finora
- PE1 Introduction To MovementsDocumento4 paginePE1 Introduction To MovementsDaniela AnsayNessuna valutazione finora
- Gma 5013Documento10 pagineGma 5013janurtpatNessuna valutazione finora
- Filled System Temperature Recorders & Recorder Controllers: SpecificationDocumento2 pagineFilled System Temperature Recorders & Recorder Controllers: SpecificationdencryNessuna valutazione finora
- Erp Case StudyDocumento19 pagineErp Case StudyMøÑïkå Shàrmå100% (1)
- Internship Report PDFDocumento11 pagineInternship Report PDFASWIN KUMARNessuna valutazione finora
- Activity Diagram Airline Reservation System PDFDocumento4 pagineActivity Diagram Airline Reservation System PDFAnonymous zSn6IALuabNessuna valutazione finora
- Streets As Places - Un Habitat ReportDocumento168 pagineStreets As Places - Un Habitat Reportrf88100% (7)
- Robit Forepoling Catalogue ENG 03-2015Documento36 pagineRobit Forepoling Catalogue ENG 03-2015Purwadi Eko SaputroNessuna valutazione finora
- Open National Abacus Competition 2021 - Maats PVT LTDDocumento8 pagineOpen National Abacus Competition 2021 - Maats PVT LTDRanjana GalphadeNessuna valutazione finora
- Module 4 - Community Health AssessmentDocumento8 pagineModule 4 - Community Health AssessmentSteffi100% (1)
- Module - 5Documento92 pagineModule - 5Anand ANessuna valutazione finora
- New Techniques of Predictions # 1Documento5 pagineNew Techniques of Predictions # 1bhagathi nageswara raoNessuna valutazione finora
- Physics 16 - Thermal ProcessesDocumento19 paginePhysics 16 - Thermal ProcessesSuhaan HussainNessuna valutazione finora
- Bioinformatics Computing II: MotivationDocumento7 pagineBioinformatics Computing II: MotivationTasmia SaleemNessuna valutazione finora
- MYP Unit Planner - MathDocumento5 pagineMYP Unit Planner - MathMarija CvetkovicNessuna valutazione finora
- Mds SM13CRM 110 enDocumento5 pagineMds SM13CRM 110 enColinNessuna valutazione finora
- Big Data Executive Survey 2019 Findings Updated 010219 1Documento16 pagineBig Data Executive Survey 2019 Findings Updated 010219 1satmaniaNessuna valutazione finora
- Technical Data Sheet: BS-510 All Pressure Solvent CementDocumento1 paginaTechnical Data Sheet: BS-510 All Pressure Solvent CementBuwanah SelvaarajNessuna valutazione finora
- 226-Article Text-601-1-10-20210702Documento12 pagine226-Article Text-601-1-10-20210702Leni NopriyantiNessuna valutazione finora
- PSCADDocumento10 paginePSCADkaran976Nessuna valutazione finora
- Intermed Products: International CatalogueDocumento12 pagineIntermed Products: International CatalogueRicardo Bonetti TadenNessuna valutazione finora
- SVC200Documento5 pagineSVC200fransiskus_ricky3329Nessuna valutazione finora
- Minimum Leak Path For TTJDocumento3 pagineMinimum Leak Path For TTJparikshitpadture100% (2)
- Alpha 20 TDS (EN) 100063006 1Documento5 pagineAlpha 20 TDS (EN) 100063006 1Ariel Gallardo Galaz100% (1)
- Overcoming Obstacles To Ethical BehaviourDocumento4 pagineOvercoming Obstacles To Ethical BehaviourSimran SinghNessuna valutazione finora
- Shallow FoundationsDocumento44 pagineShallow FoundationsAjay SinghNessuna valutazione finora
- Position, Velocity and AccelerationDocumento12 paginePosition, Velocity and Accelerationpeter vuNessuna valutazione finora
- Mindfulness For Two An Acceptance and Commitment TDocumento5 pagineMindfulness For Two An Acceptance and Commitment TNilton SantosNessuna valutazione finora